스마트… 기반 가시권 밖 드론 운영
Cinn Song
Founder & Chief Solutions Architect

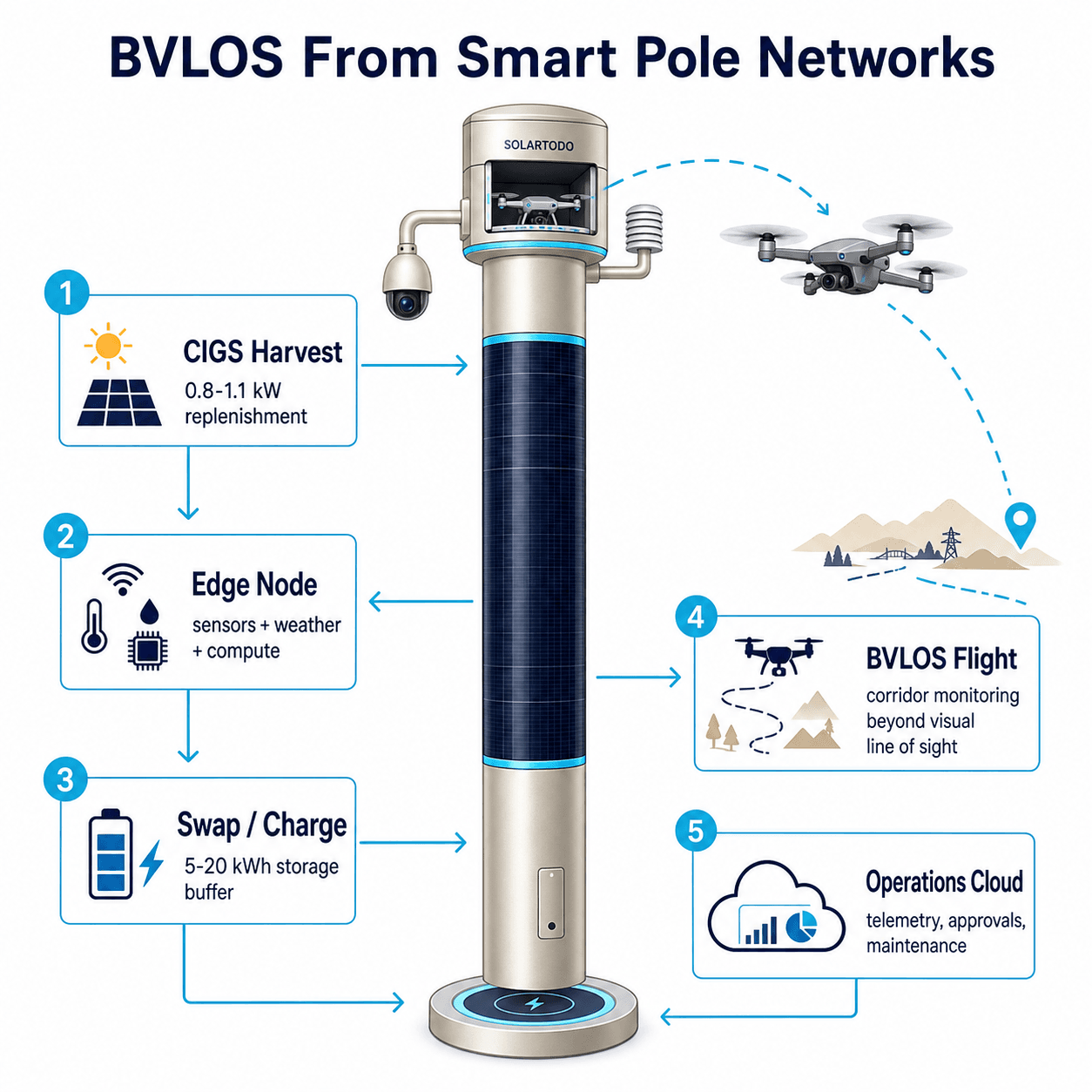
SOLARTODO 스마트 폴 네트워크 기반 BVLOS 드론 운영은 파일럿 단계 조달 및 사이트 계획을 위한 벤치마크로 0.8-1.1 kW CIGS 보충 발전, 5-20 kWh 저장 용량, 48,383 FAA BEYOND BVLOS 비행을 사용합니다.
요약
SOLARTODO 스마트 폴 네트워크 기반 BVLOS 드론 운영은 파일럿 단계 조달 및 사이트 계획을 위한 벤치마크로 0.8-1.1 kW CIGS 보충 발전, 5-20 kWh 저장 용량, 48,383 FAA BEYOND BVLOS 비행을 사용합니다.
핵심 요점
이 8가지 조달 요점은 BVLOS 스마트 폴 네트워크를 에너지 예산, 승인 게이트, EPC 범위, ROI 가정, 파일럿 단계 운영 한계로 전환합니다.
- 조달 전에 회랑 길이, 승인 경로, Remote ID 상태, 그리고 최소 1개의 인간 승인 게이트를 기준으로 BVLOS 범위를 정의합니다.
- 각 SOLARTODO Sky Hub 에너지 예산은 0.8-1.1 kW DC 피크 CIGS 출력과 6-9 kWh/day 보충 발전을 중심으로 모델링합니다.
- 드론 교체, 엣지 컴퓨팅, 센싱, 로봇 순찰 듀티 사이클을 완충하기 위해 폴당 5-20 kWh의 배터리 저장 용량을 산정합니다.
- 파일럿 운영은 검증이 필요한 3가지 성숙도 단계, 즉 하드웨어 준비 완료, 파일럿 단계 워크플로, 선도적 포지션 통합을 기준으로 계획합니다.
- 원본 영상과 센서 피드의 100%를 폴에 유지하고 비식별 이벤트 메타데이터만 전송하도록 엣지 처리를 사용합니다.
- 파일럿 검증 후 대규모 캠퍼스에서 일상적인 현장 방문이 20-40% 감소한다고 추정해 유인 순찰과 폴 네트워크를 비교합니다.
- C-UAS는 인간 승인 기반의 비치명 탐지, 추적, 조정, 그리고 시뮬레이션된 그물 포획 또는 근접 접근 억제 용도로만 명시합니다.
- EPC 가격은 3단계로 요청한 뒤, 50, 100, 250 units에서 5%, 10%, 15%의 물량 가이던스를 적용합니다.
오프그리드 드론 운영을 위한 BVLOS 스마트 폴 네트워크
BVLOS 스마트 폴 네트워크는 5-20 kWh 저장 용량과 6-9 kWh/day 태양광 보충 발전을 활용해 드론 운영을 단일 이륙 지점에서 분산형 승인 통제 인프라로 전환합니다. SOLARTODO Sentinel / Sky Hub의 경우, 자율 드론 서비스, 로봇 검사, 공중-지상 조정, C-UAS 대응은 별도 입증이 없는 한 시연 또는 파일럿 단계의 미래지향적 개념 역량입니다.
가시권 밖 운영은 단순히 더 긴 비행 경로를 의미하지 않습니다. 항공기가 어디에 있는지, 무엇을 하고 있는지, 위험이 어떻게 탐지되는지, 누가 개입 권한을 갖는지를 입증할 수 있는 시스템이 필요합니다. 스마트 폴 네트워크가 도움이 되는 이유는 각 노드가 전력 완충, 로컬 컴퓨팅, 환경 센싱, 기체 상태, 명령 기록을 위한 고정 지점이 되기 때문입니다.
SOLARTODO Sky Hub 개념은 조명 시스템이 없는 순수 스마트 폴로 이해해야 합니다. 이는 구매자가 반복 가능한 폴 형태의 마이크로 스테이션에서 순찰, 검사, 경보 확인, 현장 자율성을 원하는 스마트 지구, 산업단지, 항만, 캠퍼스, 도시 외곽, 유틸리티 회랑, 중요 인프라 구역을 목표로 합니다.
FAA BEYOND 프로그램(2025)에 따르면, Phase 1은 2025년에 Phase 2가 시작되기 전 48,383 BVLOS flights를 포함해 70,563 flights를 기록했습니다. FAA는 또한 "Remote ID가 기반을 마련한다"고 밝히므로, 식별, 텔레메트리, 통제 스테이션 책임성은 조달 패키지에 포함되어야 합니다.
B2B 구매자에게 비즈니스 문제는 보통 드론 자체가 아닙니다. 어려운 문제는 반복 가능성입니다. 항공기를 충전 상태로 유지하고, 작업을 배차하며, 감사 로그를 유지하고, 기상 한계를 모니터링하는 것입니다. 폴 네트워크는 소유자에게 다른 중요 인프라처럼 시운전, 점검, 거버넌스를 수행할 수 있는 운영 앵커를 제공합니다.
기술 아키텍처와 데이터 거버넌스

BVLOS-ready Sky Hub 노드는 오프그리드 전력, 드론 서비스, 엣지 컴퓨팅, 센싱, 환경 데이터, 미션 컨트롤, 로봇 지원, C-UAS 조정, 메타데이터 교환이라는 9개의 기능 영역을 결합합니다.
에너지 및 듀티 사이클 아키텍처
폴은 완전 오프그리드 배터리 백업 마이크로 스테이션으로 설계됩니다. CIGS 보충 발전 계층은 일사량이 강한 지역에서 약 0.8-1.1 kW DC 피크, 맑은 하늘 조건에서 약 6-9 kWh/day, 태양광 자원이 유리한 곳에서 연평균 약 5-8 kWh/day로 모델링해야 합니다. 이는 보충 발전 예산이지 무제한 자급자족이 아닙니다.
고전력 작업은 저장 용량과 듀티 사이클에 맞춰 스케줄링됩니다. 드론 이륙, 복귀, 자동 배터리 교체, 엣지 추론, 환경 센싱, 통신, 지상 로봇 충전은 모두 동일한 에너지 범위에서 전력을 사용합니다. 5-20 kWh급 배터리는 CIGS 계층이 충전 상태를 회복하는 동안 시스템이 짧은 피크를 흡수할 수 있게 합니다.
NREL PVWatts V8 (2026)에 따르면, PV 모델링은 0.05-500,000 kW 시스템 용량 입력과 시간별 출력을 수용할 수 있습니다. 이를 최종 CIGS 발전량 보장이 아니라 사이트 스크리닝에 사용하십시오. IRENA (2026)에 따르면, 재생에너지는 2025년에 692 GW가 추가되었고 전 세계 용량 확대의 85.6%를 차지했으며, 태양광은 약 511 GW를 차지했습니다. IRENA 사무총장 Francesco La Camera는 "재생에너지는 확장 면에서 일관되고 확고하다"고 말합니다.
엣지 컴퓨팅, 개인정보 보호, 미션 워크플로
엣지 스택은 Jetson급 컴퓨팅을 사용해 로컬 추론을 실행하고, 워크로드를 스케줄링하며, 이벤트 라우팅을 관리합니다. 원본 영상과 센서 데이터는 폴에 유지됩니다. 비식별 알림, 상태 메타데이터, 미션 로그, 배터리 상태, 장비 상태 기록만 노드 외부로 나가야 합니다.
이 로컬 처리 설계는 관제실이 지속적인 원본 데이터 내보내기에 기본 의존하지 않으면서 운영 증거를 수신할 수 있게 하므로 PDPL/LGPD 지향 거버넌스를 지원합니다. 또한 많은 이벤트가 규칙 임계값을 넘기 전까지는 가치가 낮은 환경에서 대역폭 부하를 줄입니다. 로컬 분석은 익명 차량 수, 군중 밀도, 침입, 경계 인식으로 제한되어야 하며, 능동 얼굴 인식이나 licence-plate recognition이 되어서는 안 됩니다.
운영 루프는 센싱, 승인된 평가와 대응, 엣지 컴퓨팅 스케줄링, 현장 운영 및 유지보수입니다. 지휘 센터 관점에서 이는 노드 상태, 미션 대기열, 기상 한계, 항공기 준비 상태, 로봇 가용성, 이벤트 심각도, 인간 승인 상태를 보여주는 공통 운영 상황도가 됩니다.
드론 서비스 및 C-UAS 경계
드론 워크플로에는 이륙, 순찰, 검사, 복귀, 배터리 교체, 작업 재배치가 포함됩니다. 다중 베이 배터리 매거진은 착륙한 항공기의 배터리를 충전된 팩으로 교체해 여러 차례의 연속 출격을 지원할 수 있습니다. 미션 관리는 경로 계획, 교체 상태, 작업 대기열, 상태 텔레메트리, 로그를 포함해야 합니다.
C-UAS 조정은 비치명적이며 인간 승인 기반으로 유지되어야 합니다. 폴은 온보드 인식 및 선택적 파트너 센서 입력을 사용해 무단 드론을 탐지하고 추적한 뒤, 시뮬레이션된 공중 그물 포획 또는 근접 접근 억제를 위해 우호 드론을 조정할 수 있습니다. 레이더는 폴 하드웨어가 아니라 선택적 또는 시뮬레이션된 외부 입력으로만 취급해야 합니다. 모든 완화 조치에는 현지 법률 검토와 명시적 운영자 승인이 필요합니다.
EPC 투자 분석 및 가격 구조
EPC 납품은 3가지 상업 범위, 즉 FOB 장비 공급, CIF 납품 물류, 설치, 시운전, 교육, 인수 테스트를 포함한 턴키 배포를 비교해야 합니다.
SOLARTODO의 경우 조달은 일반적으로 문의, 오프라인 견적, 엔지니어링 검토, 납품 범위 확인, 적격 대형 프로젝트를 위한 금융 논의 순서로 진행됩니다. EPC 턴키 납품에는 현장 조사, 토목 공사 조정, 폴 기초, 오프그리드 에너지 시운전, 드론 서비스 설정, 환경 센서 보정, 네트워크 통합, 운영자 교육, 예비 부품 계획, 인수 테스트가 포함되어야 합니다.
3단계 가격 책정은 숨겨진 가정을 피하는 데 도움이 됩니다. FOB Supply는 공장 장비 패키지와 수출 문서를 포함합니다. CIF Delivered는 목적지 항구까지의 운임과 보험을 추가합니다. EPC Turnkey는 현지 설치 관리, 시운전, 교육, 현장 인수, 프로젝트 문서를 추가합니다. 구매자는 SOLARTODO에 장비 비용, 물류, 토목 공사, 설치, 소프트웨어 구성, 보증 범위, 연간 유지보수를 분리해 제시하도록 요청해야 합니다.
물량 가격 가이던스는 최종 구성과 국가별 물류에 따라 50+ units에서 5% 할인, 100+ units에서 10%, 250+ units에서 15%로 모델링할 수 있습니다. 표준 결제 조건은 30% T/T plus 70% against B/L 또는 100% L/C at sight일 수 있습니다. $1,000K를 초과하는 대형 프로그램에는 프로젝트 금융이 제공될 수 있습니다. 상업적 적격성 확인은 [email protected]으로 문의하십시오.
ROI는 보장이 아니라 파일럿으로 보정된 모델로 취급해야 합니다. 방어 가능한 비즈니스 케이스는 정기 순찰 인건비, 차량 주행거리, 검사 빈도, 대응 시간, 보안 사고 확인, 별도 캐비닛, 도크, 센서 폴, 통신 사이트의 비용을 비교합니다. 대규모 캠퍼스의 경우, 보수적인 계획 사례는 검증 후 정기 현장 방문 20-40% 감소를 목표로 할 수 있습니다.
IEA (2024)에 따르면, 주요 시나리오는 2030년까지 5,500 GW의 신규 재생에너지 용량을 예상하며, 최소 1,650 GW의 고급 재생에너지 프로젝트가 계통 연결을 기다리고 있었습니다. 이 대기열 통계는 원격지 또는 전력 제약 사이트에서 신중하게 범위가 설정된 오프그리드 인프라의 타당성을 강화하지만, 배터리 크기 산정과 듀티 사이클 관리의 필요성을 없애지는 않습니다.
적용 분야, 선택 가이드, 운영 한계
최초 BVLOS 배포에 가장 적합한 대상은 검사 가치, 보안 긴급성, 통신 커버리지, 규제 승인을 함께 검증할 수 있는 통제된 2-20 km 회랑입니다.
실용적 사용 사례에는 항만 경계 순찰, 태양광 발전소 검사, 파이프라인 또는 펜스 라인 모니터링, 캠퍼스 비상 확인, 산업 야드 재고 점검, 도로 또는 교량 상태 검토, 중요 인프라 경계 인식이 포함됩니다. 우수한 프로젝트는 반복 경로, 측정 가능한 대응 시간 개선, 접근 통제, 표지, 개인정보 고지, 유지보수 창을 관리할 수 있는 사이트 소유자를 갖습니다.
선택은 운영 개념에서 시작해야 합니다. 구매자는 하드웨어 옵션을 선택하기 전에 경로, 고도 범위, 이륙 빈도, 체공 시간, 비상 착륙 옵션, 통신 커버리지, 기상 임계값, 의사결정 권한을 정의해야 합니다. FAA Part 107 waiver guidance (2024)에 따르면, 신청자는 표준 규칙 외 운영을 요청할 때 운영 위험과 완화 방법을 설명해야 합니다.
| 선택 요소 | 파일럿 준비 요건 | 무시할 경우 조달 리스크 |
|---|---|---|
| 에너지 예산 | 0.8-1.1 kW DC 피크 CIGS, 5-20 kWh 저장 용량 | 연속 출격 중 배터리 고갈 과소평가 |
| 규제 경로 | BVLOS waiver, COA 또는 현지 동등 승인 | 하드웨어 납품 후 항공기 운항 중단 |
| 데이터 거버넌스 | 원본 데이터는 로컬 처리, 메타데이터는 내보내기 | 개인정보 이의와 과도한 대역폭 비용 |
| 미션 빈도 | 일일 출격 횟수와 교체 사이클 정의 | 과도한 도크 구축 또는 저장 용량 부족 |
| 통신 | 중복 링크와 이벤트 로그 | 명령 연속성 상실 또는 불완전한 감사 추적 |
| C-UAS 범위 | 인간 승인 기반의 비치명 시연 전용 | 금지된 완화 주장으로 인한 법적 노출 |
성숙도는 3단계로 구분해야 합니다. 하드웨어 준비 완료 항목에는 폴 구조, 에너지 아키텍처, 센서 배치, 배터리 서비스 아키텍처, 엣지 컴퓨팅 통합이 포함됩니다. 파일럿 단계 항목에는 드론 운영 관리, 환경 모니터링, PTZ 로컬 분석, OTATODO 엣지 워크플로가 포함됩니다. 선도적 포지션 항목에는 C-UAS 완화, 공중-지상 로봇 조정, V2X, 선택적 파트너 레이더 입력, 전체 공통 운영 상황도 자동화가 포함됩니다.
주요 한계는 스마트 폴 네트워크 자체만으로 BVLOS 비행을 승인할 수 없다는 점입니다. 인프라 마찰을 줄이고, 증거 수집을 개선하며, 운영을 표준화할 수는 있지만 승인은 여전히 관할권별로 다릅니다. 기상, 배터리 노화, 통신 공백, 페이로드 한계, 개인정보 보호법, 지역사회 수용성을 포함해야 합니다.
FAQ
이 10개 FAQ 답변은 조달 팀을 위해 BVLOS 승인, 오프그리드 에너지, 유지보수, 가격, 개인정보 보호, C-UAS 경계를 40-80 word 답변으로 다룹니다.
Q: 스마트 폴 드론 운영에서 BVLOS는 무엇을 의미합니까? A: BVLOS는 승인된 안전 사례에 따라 드론이 조종자의 비보조 직접 시야 밖에서 운영된다는 의미입니다. 스마트 폴 네트워크에서 각 노드는 이륙, 회수, 에너지 완충, 로컬 센싱, 명령 메타데이터를 지원할 수 있지만, 운영자는 여전히 미션 승인을 위한 관할권별 승인, 문서화된 위험 통제, 인간 감독이 필요합니다.
Q: SOLARTODO Sky Hub는 계통 전력 없이 BVLOS 워크플로를 어떻게 지원합니까? A: SOLARTODO Sky Hub는 배터리 저장 용량과 CIGS 보충 발전을 사용하는 완전 오프그리드 스마트 폴로 설계되었습니다. CIGS 계층은 현실적인 보조 발전으로, 일사량이 강한 지역에서 대략 0.8-1.1 kW DC 피크와 6-9 kWh/day를 제공하며, 5-20 kWh급 저장 용량은 드론 서비스, 센싱, 컴퓨팅, 통신 부하를 완충합니다.
Q: 클라우드 분석을 위해 원본 영상을 폴 밖으로 보낼 수 있습니까? A: 의도된 아키텍처는 로컬 처리를 위해 원본 영상과 센서 피드를 폴에 유지합니다. 비식별 이벤트 기록, 운영 상태, 경보, 상태 텔레메트리, 미션 로그만 사이트 외부로 나가야 합니다. 이는 대역폭 수요를 줄이고 PDPL/LGPD 지향 개인정보 보호 설계를 지원하지만, 법적 준수는 여전히 현지 배포 검토에 달려 있습니다.
Q: BVLOS 드론 운영에는 일반적으로 어떤 승인이 필요합니까? A: 승인은 국가, 공역 등급, 드론 중량, 운영 고도, 인구 밀도, 탐지 및 회피 개념에 따라 달라집니다. 미국에서는 가시권 제한 밖의 FAA Part 107 운영에 waiver 또는 기타 승인 권한이 필요합니다. 조달 팀은 안전 사례 준비, 시험, 교육, 규제기관 협의에 대한 예산을 편성해야 합니다.
Q: 드론 도크와 스마트 폴 네트워크의 차이는 무엇입니까? A: 독립형 도크는 일반적으로 하나의 이륙 사이트를 지원하는 반면, 스마트 폴 네트워크는 전력, 센싱, 컴퓨팅, 미션 상태를 여러 노드에 분산합니다. BVLOS 회랑의 경우, 이 네트워크는 커버리지, 중복성, 유지보수 접근성을 개선할 수 있습니다. SOLARTODO는 Sky Hub를 조명 제품이 아니라 순수 스마트 폴로 포지셔닝합니다.
Q: 구매자는 BVLOS 스마트 폴 네트워크의 ROI를 어떻게 추정해야 합니까? A: ROI는 회피된 순찰 시간, 감소한 현장 출동, 더 빠른 경보 확인, 개선된 자산 검사 빈도, 별도 캐비닛 또는 기초 작업 감소를 비교해야 합니다. 초기 파일럿에서는 검증 후 정기 검사 방문 20-40% 감소와 같은 보수적 가정을 사용한 뒤, 측정된 미션 성공률, 배터리 처리량, 유지보수 비용, 승인 오버헤드에 맞춰 조정합니다.
Q: 시스템에 counter-UAS 완화 기능이 포함됩니까? A: 이 개념은 C-UAS 조정을 비치명적이고 인간 승인 기반의 탐지, 추적, 대응 조정으로만 허용합니다. 시연 워크플로에는 우호 드론에 의한 시뮬레이션된 공중 그물 포획 또는 근접 접근 억제가 포함될 수 있습니다. 폴은 레이더 하드웨어로 설명되지 않으며, 완화는 금지된 물리력, 신호 차단 방식, 자동화된 적대적 대응을 피해야 합니다.
Q: 오프그리드 BVLOS 폴에는 어떤 유지보수가 필요합니까? A: 유지보수는 배터리 상태, CIGS 표면 상태, 커넥터, 기상 씰, 드론 배터리 매거진 작동, 충전 인터페이스, PTZ 보정, 환경 센서, 엣지 컴퓨팅 로그를 포함해야 합니다. 일반적인 계획에는 주간 원격 상태 점검, 3-6 months마다 현장 검사, 악천후 또는 비정상 도킹 결함 후 사후 이벤트 검사가 포함됩니다.
Q: 대형 프로젝트의 EPC 가격은 어떻게 구성됩니까? A: SOLARTODO B2B 프로젝트는 FOB Supply, CIF Delivered 또는 EPC Turnkey 견적으로 요청해야 합니다. EPC는 장비 공급에 현장 조사, 기초, 설치, 시운전, 교육, 프로젝트 관리를 추가합니다. 물량 가이던스는 50, 100, 250 units에서 적용될 수 있으며, 결제 조건은 30% T/T plus 70% against B/L 또는 100% L/C at sight를 사용할 수 있습니다.
Q: 구매자는 언제 전체 롤아웃 대신 파일럿 배포를 선택해야 합니까? A: BVLOS 승인, 현지 통신 커버리지, C-UAS 규칙, 데이터 거버넌스 요구사항 또는 드론 듀티 사이클이 검증되지 않은 경우 파일럿을 선택하십시오. 3-6 month 파일럿은 $1,000K를 초과하는 다중 사이트 롤아웃 또는 금융 약정 전에 에너지 발전량, 미션 완료율, 경보 워크플로, 개인정보 보호 통제, 유지보수 부담을 검증할 수 있습니다.
참고문헌
이 8개 참고문헌은 2024-2026 계획을 위해 BVLOS 승인, 재생에너지 전력 가정, PV 모델링, 원격 식별, 전기 안전 선택을 공신력 있는 기관에 연결합니다.
- FAA UAS BEYOND Program (2025): Phase 1의 70,563 total flights와 48,383 BVLOS flights 성과를 보고하며, Phase 2는 2029까지 운영됩니다. https://www.faa.gov/uas/programs_partnerships/beyond
- FAA Part 107 Waivers (2024): 가시권 제약을 포함해 Part 107 한계 밖 운영에 대한 waiver 요구사항을 설명합니다. https://www.faa.gov/uas/commercial_operators/part_107_waivers
- FAA Remote Identification of Drones (2025): Remote ID를 비행 중 드론의 방송 식별 및 위치 정보로 정의합니다. https://www.faa.gov/uas/getting_started/remote_id
- IEA Renewables 2024 (2024): 2030년까지 5,500 GW의 신규 재생에너지 용량을 예측하고, 태양광 PV를 재생에너지 성장의 80%로 식별합니다. https://www.iea.org/reports/renewables-2024
- IRENA Renewable Capacity Statistics 2026 (2026): 2025년 692 GW의 재생에너지 추가, 용량 확대의 85.6% 비중, 511 GW 태양광 추가를 보고합니다. https://www.irena.org/News/pressreleases/2026/Apr/Near-700-GW-Surge-in-2025-Proves-Renewable-Energy-Resilience
- NREL PVWatts V8 API (2026): PVWatts V8 태양광 자원 데이터셋, 0.05-500,000 kW 용량 입력, 시간별 출력, 태양광 성능 모델링을 문서화합니다. https://developer.nrel.gov/docs/solar/pvwatts/v8/
- IEEE 2030.5-2018 (2018): 엣지 에너지 통합과 관련된 분산 에너지 자원 및 유틸리티 통신을 위한 Smart Energy Profile 애플리케이션 프로토콜입니다. https://standards.ieee.org/ieee/2030.5/5897/
- ASTM F3411-22a (2022): 상호운용 가능한 드론 식별 워크플로와 관련된 무인 항공기 시스템의 Remote ID 및 추적 표준 사양입니다. https://www.astm.org/f3411-22a.html
결론
BVLOS 스마트 폴 네트워크는 5-20 kWh 저장 용량, 6-9 kWh/day 보충 발전, 승인 주도 미션 컨트롤을 결합하는 파일럿 검증 인프라로서 가장 강력합니다.
핵심은 다음과 같습니다. SOLARTODO Sky Hub는 조명 자산이나 무제한 태양광 플랫폼이 아니라 통제된 BVLOS 회랑을 위한 완전 오프그리드 순수 스마트 폴로 명시되어야 합니다. 50 nodes를 초과하는 프로젝트의 경우, 구매자는 3단계 견적을 요청하고, 3-6 month 파일럿을 검증한 뒤, 에너지 발전량, 미션 로그, 유지보수 비용, 승인 워크플로가 입증된 후에만 확장해야 합니다.
SOLARTODO 소개
SOLARTODO는 전 세계 B2B 고객을 위해 태양광 발전 시스템, 에너지 저장 제품, 스마트 가로등 및 태양광 가로등, 지능형 보안 및 IoT 연계 시스템, 송전탑, 통신 타워, 스마트 농업 솔루션을 전문으로 하는 글로벌 통합 솔루션 제공업체입니다.
저자 소개

Cinn Song
Founder & Chief Solutions Architect
Cinn Song founded SOLARTODO LIMITED and leads its smart-city infrastructure engineering — from solar, storage and integrated smart poles to the company's push into physical-AI city edge nodes: pole-mounted edge computing, vertical LLMs for smart cities, drone-based O&M with autonomous battery swapping, robotic maintenance, and high-speed counter-UAS interception. Since 2010, he has directed turnkey EPC + BOT delivery across 50+ countries, including telecom monopole supply for national grid operators, off-grid solar street-lighting for African municipalities, and integrated smart-pole programs for Gulf smart cities.
이 기사 인용
Cinn Song. (2026). 스마트… 기반 가시권 밖 드론 운영. SOLARTODO. Retrieved from https://solartodo.com/ko/knowledge/beyond-visual-line-of-sight-drone-operations-from-smart-pole-networks
@article{solartodo_beyond_visual_line_of_sight_drone_operations_from_smart_pole_networks,
title = {스마트… 기반 가시권 밖 드론 운영},
author = {Cinn Song},
journal = {SOLARTODO Knowledge Base},
year = {2026},
url = {https://solartodo.com/ko/knowledge/beyond-visual-line-of-sight-drone-operations-from-smart-pole-networks},
note = {Accessed: 2026-06-21}
}Published: June 21, 2026 | Available at: https://solartodo.com/ko/knowledge/beyond-visual-line-of-sight-drone-operations-from-smart-pole-networks