
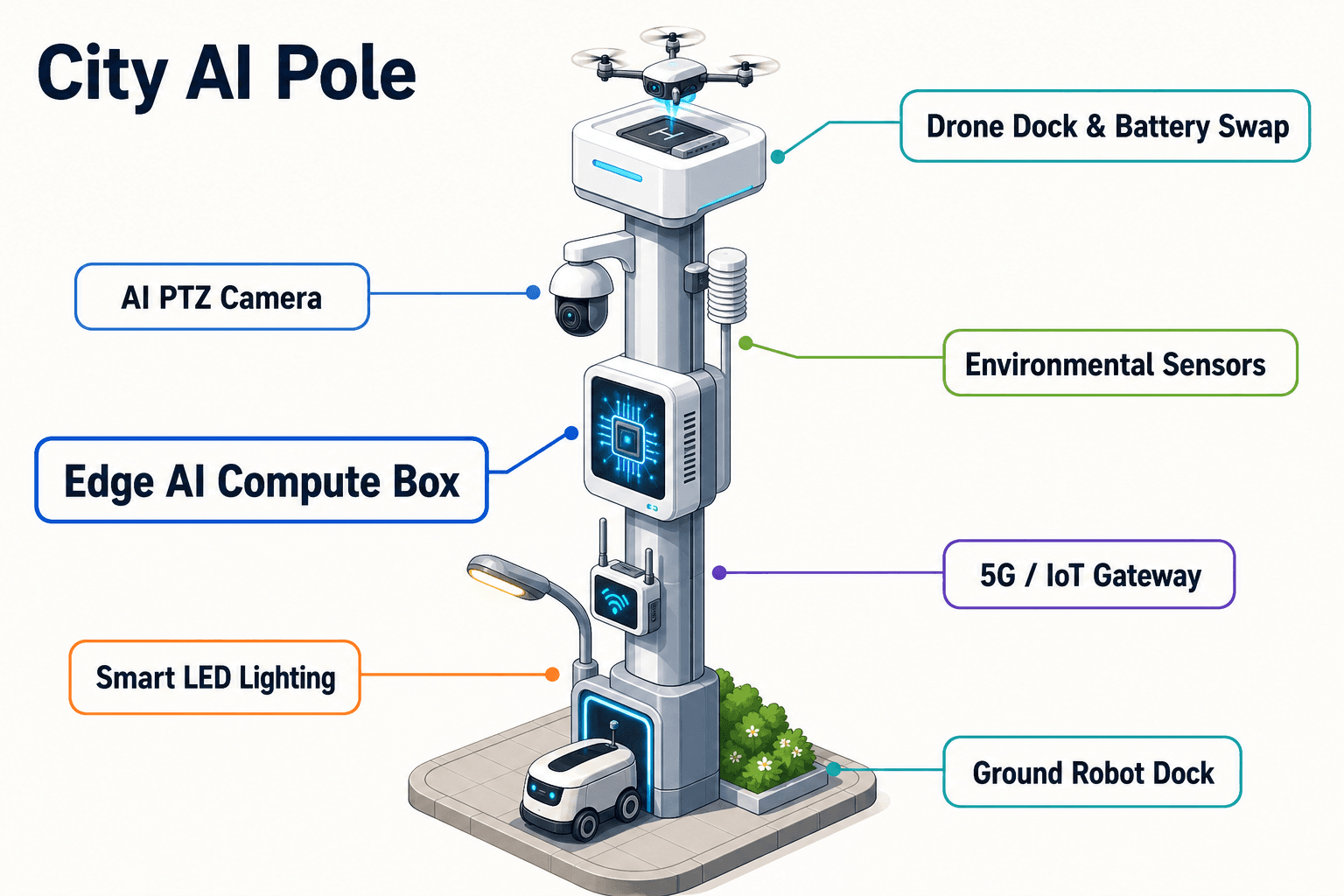
City AI Pole은 로컬 센싱, 엣지 컴퓨팅, 배터리 기반 태양광 보충, 드론 운영 및 로봇 운영을 비조명 폴 형태로 결합한 완전 독립형 물리 AI 엣지 노드입니다. 이 무스카트 구성에서 SOLARTODO Sentinel Sky Hub는 증거를 로컬에서 처리하고 비식별화된 이벤트 및 상태 메타데이터만 공유함으로써 구시가지 하천 횡단면 지점의 휴일 야간 순찰을 지원합니다.
1. 파일럿 배경: 무스카트 구시가지, 휴일 야간 및 하천 횡단면 증거
이 파일럿 보고서 구성은 오만 무스카트의 구시가지 야간 순찰 운영을 담당하는 생태환경 이해관계자를 위해 작성되었습니다. 초점은 교통 조명, 거리 경관 장식 또는 일반적인 스마트시티 쇼케이스가 아닙니다. 도시 과제는 더 좁고 운영 중심적입니다. 휴일 기간 동안 환경 사고, 야간 이동, 군중 밀집, 투기, 소음, 연기, 먼지 또는 무단 접근을 문서화해야 할 수 있는 선정된 하천 횡단면 지점에 물리 AI 엣지 노드를 배치하는 것입니다.
무스카트 구시가지는 실질적인 모니터링 과제를 제시합니다. 순찰 팀은 어두워진 후 증거 수집 표준화가 더 어려운 상황에서 수변 가장자리, 와디, 배수로 횡단부, 문화유산 인접 공공 공간, 서비스 도로 및 경계 지점을 포괄해야 할 수 있습니다. 휴일이라는 트리거는 운영 패턴을 바꿉니다. 방문객 증가, 저녁 활동 시간 연장, 임시 서비스 부하, 그리고 개인정보를 과도하게 수집하지 않으면서 검토 가능한 명확한 기록에 대한 필요성이 커집니다.
제안된 SOLARTODO Sentinel Sky Hub 구성은 city-ai-pole 범주를 조명 자산이 아닌 도시 엣지 노드로 사용합니다. 각 Sky Hub는 조명 시스템이 없는 PURE 스마트 폴입니다. 그 역할은 센싱, 컴퓨팅, 에너지 저장, 드론 운영, 로봇 운영 및 증거 워크플로 조정을 하나의 독립형 마이크로 스테이션에 호스팅하는 것입니다.
파일럿은 특히 현장 선정, 풍하중 노출, 태양광 발전량, 무선 계획, 드론 비행 허가, 지상 로봇 경로 안전 및 현지 운영 절차에 대해 최종 엔지니어링 확인이 필요합니다. 목적은 달성된 결과를 주장하는 것이 아니라 신뢰할 수 있는 배치 패턴과 평가 프레임워크를 정의하는 것입니다.
2. 배치 패턴: 로컬 증거 스테이션으로서의 하천 횡단면 노드
제안된 배치 방식은 하천 횡단면입니다. Sky Hub 노드는 생태환경 팀이 양안, 횡단 접근로 또는 인접 서비스 통로에서 반복 가능한 증거를 확보하고자 하는 선정된 횡단면 관측 지점에 배치됩니다. 무스카트에서는 야간에 조건이 빠르게 변하는 구시가지 배수로, 와디 인접 경로, 수변 가장자리 또는 통제된 경계 전환 구간을 의미할 수 있습니다.
Sky Hub 폴은 완전 독립형 스테이션으로 작동합니다. 이 폴은 높이 약 8 meters, 폭 약 0.6 meters의 수직 원통형 본체 전체에 약 15 square meters의 360-degree 래핑형 유연 CIGS 박막 태양광을 탑재합니다. 태양광 층은 보충 층이며, 무제한 에너지 주장이 아닙니다. 고일사 지역에서 이 수직 원통형 형식의 현실적인 맑은 하늘 출력은 대략 0.8 to 1.1 kW DC peak이며, 일반적으로 정오가 아니라 오전 중반 또는 오후에 피크에 도달하고, 하루 약 6 to 9 kWh 수준입니다. 고출력 드론 및 로봇 작업은 5 to 20 kWh급 저장장치로 버퍼링되며 듀티 사이클에 따라 스케줄링됩니다.
이 에너지 설계는 구시가지 운영에 중요합니다. 유용한 모니터링 지점 다수가 전력 공급에 편리한 장소가 아니기 때문입니다. 모든 횡단면에 전력을 끌어오면 승인, 현장 공사 및 유지보수 인터페이스가 추가됩니다. Sky Hub는 전력망, 도시 또는 현장 전력에 대한 의존성을 피하면서도 엄격한 듀티 사이클 계획을 요구합니다.
각 노드에서 폴 장착 common-operating-picture 뷰는 운영 루프를 센싱, 승인된 평가 및 대응, 엣지 컴퓨팅 스케줄링, 현장 운영 및 유지보수로 제시합니다. 이는 감지, 확인, 대응 계획 및 조정을 하나의 루프로 보는 중국식 운영 개념을 지원하면서도 의사결정 경로에 인간 승인을 유지합니다.
3. 엣지 컴퓨팅 워크플로: 메타데이터가 폴을 떠나기 전 로컬 처리
이 무스카트 구성의 핵심 모듈 초점은 엣지 컴퓨팅입니다. Orin 또는 Thor급 성능 계층의 Jetson급 엣지 모듈이 폴 내부에서 로컬 추론, 이벤트 스코어링 및 워크로드 스케줄링을 실행합니다. 원시 영상 및 센서 스트림은 폴에 남아 로컬에서 처리됩니다. 운영 정책에 따라 비식별화된 이벤트 메타데이터, 상태 메타데이터, 로그 및 승인된 증거 패키지만 노드를 떠날 수 있습니다.
생태환경 이해관계자에게 이는 증거 수집 워크플로를 바꿉니다. 연속 원시 영상을 중앙에서 수집한 뒤 나중에 검토하는 대신, 폴은 운영상 관련 있는 이벤트를 엣지에서 분류합니다. 익명 차량 수, 군중 밀도 변화, 침입 또는 경계 인식, 비정상 소음 추세, 먼지 변화, 풍향 변화, 조도 변화, 드론 또는 로봇 운영의 미션 상태가 포함됩니다. 이 시스템은 설계상 PDPL/LGPD 지향이며, 로컬 처리와 데이터 최소화를 위해 설계되었음을 의미합니다. 이는 인증 또는 이미 검증된 규제 준수를 주장하는 것이 아닙니다.
야간 순찰 시나리오는 PTZ 카메라가 하천 횡단면 접근로 인근 활동을 감지하고, 환경 센서가 높은 소음 및 입자상 물질 수치를 표시하는 상황에서 시작될 수 있습니다. 엣지 모듈은 이벤트를 스코어링하고, PTZ가 장면을 유지하도록 스케줄링하며, 명령 뷰에 비식별화된 알림을 표시합니다. 인간 운영자는 상공 점검을 위한 드론 출동을 승인하거나 허가된 경로를 따라 더 가까운 관찰을 위해 지상 로봇을 파견할 수 있습니다.
목적은 자동화로 책임성을 대체하는 것이 아닙니다. 목적은 첫 번째 증거 패키지를 더 일관되게 만드는 것입니다. 시간, 노드 상태, 환경 수치, 센서 스냅샷, 미션 결정, 운영자 승인, 드론 또는 로봇 작업 로그, 종료 메모가 포함됩니다. 이는 불필요한 야간 순찰 반복을 줄이고 더 나은 검토 품질을 지원합니다.
4. 야간 순찰 운영: 드론, 로봇 및 C-UAS 조정
휴일 야간 순찰 기간 동안 Sky Hub는 로봇 준비 및 드론 준비 엣지 노드로 구성됩니다. 드론 운영에는 폴에 운영자가 상주하지 않는 자율 출동을 위한 이륙, 지역 순찰, 점검, 복귀 및 작업 재배치가 포함됩니다. 다중 베이 배터리 매거진은 착륙 후 자동 후방 서비스 배터리 교환을 수행하여 드론이 충전된 팩을 받고 재이륙할 수 있게 합니다. 여러 베이는 운영 계획 내에서 여러 차례의 연속 출동을 지원합니다.
드론 운영 관리는 경로 계획, 충전 및 교체 상태 관리, 작업 큐잉, 플릿 상태 및 미션 로그를 통해 처리됩니다. 엣지 모듈은 환경 센싱, 카메라 분석, 드론 작업 및 로봇 작업이 전력이나 컴퓨팅을 무분별하게 두고 경쟁하지 않도록 워크로드를 스케줄링합니다.
지상 로봇 운영은 근거리 증거를 위한 두 번째 계층을 추가합니다. 휴머노이드 또는 서비스 로봇은 자율 순찰, 경보 대응, 점검, 공중-지상 조정, 그리고 무선 충전을 위한 폴 베이스 복귀를 수행할 수 있습니다. 구시가지 환경에서는 드론 시야만으로 충분하지 않고, 팀을 즉시 저시야 구역으로 보내지 않고도 경로 수준의 관찰이 필요할 때 유용합니다.
Counter-UAS 조정은 신중하게 처리됩니다. 폴은 자체 로컬 센싱과 승인된 선택형 파트너 센서 입력을 사용하여 무단 드론을 감지하고 추적합니다. 레이더는 폴에 내장되어 있지 않으며, 선택형 또는 파트너 센서 입력으로만 고려될 수 있습니다. 인간 승인 후 노드는 자체 우호 드론에 소프트 공중망 포획 또는 근접 접근 억제를 수행하도록 명령할 수 있습니다. 완화 접근 방식은 비살상이며 인간 승인 기반으로, 자율 공격은 없습니다.
5. 평가 프레임워크: 주장된 결과가 아닌 Opex 중심 계획
무스카트 파일럿의 opex 프레이밍은 운영 노력, 순찰 반복, 증거 검토 업무량 및 현장 출동 규율에 관한 것입니다. 이 보고서는 달성된 성능, 탐지율, 커버리지 면적, 고객 보증, 인증 또는 롤아웃 규모를 주장하지 않습니다. 구매자가 엔지니어링, 인허가 및 운영 설계 과정에서 조정할 수 있는 계획 가정을 제공합니다.
생태환경 팀의 경우 평가는 현재 야간 순찰 관행과 노드 지원 워크플로를 비교해야 합니다. 유용한 지표에는 자동화할 수 있는 정기 순찰 통과 횟수, 첫 검토에서 충분한 증거로 종료되는 환경 알림 수, 드론 또는 로봇이 충분한 맥락을 수집하여 인간 출동을 피하는 빈도, 비식별화된 이벤트 기록이 얼마나 일관되게 생성되는지가 포함됩니다.
시스템이 완전 독립형이므로 평가에는 에너지 규율도 포함되어야 합니다. 일일 태양광 보충, 저장 예비량, 드론 출동 듀티 사이클, 로봇 순찰 듀티 사이클, 그리고 태양광 출력에 영향을 주는 날씨 또는 먼지 조건이 포함됩니다. 360-degree CIGS 랩은 전방위 노출을 개선하지만, 특정 순간의 실제 출력은 태양을 향한 투영 면적이 좌우합니다. 구매자는 태양광을 배터리 기반 마이크로 스테이션을 위한 보조 보충으로 취급해야 하며, 모든 고출력 모듈을 지속적으로 운전해도 된다는 허가로 보아서는 안 됩니다.
신뢰할 수 있는 무스카트 평가는 운영 결정으로 끝납니다. 어떤 횡단면 지점이 영구 노드 서비스를 정당화하는지, 어떤 순찰 작업이 수동으로 남아야 하는지, 어떤 이벤트 유형이 인간 에스컬레이션을 요구하는지, 그리고 원시 영상을 폴 외부로 이동하지 않고 생태환경 증거 수집에 충분한 메타데이터 필드가 무엇인지 결정해야 합니다.
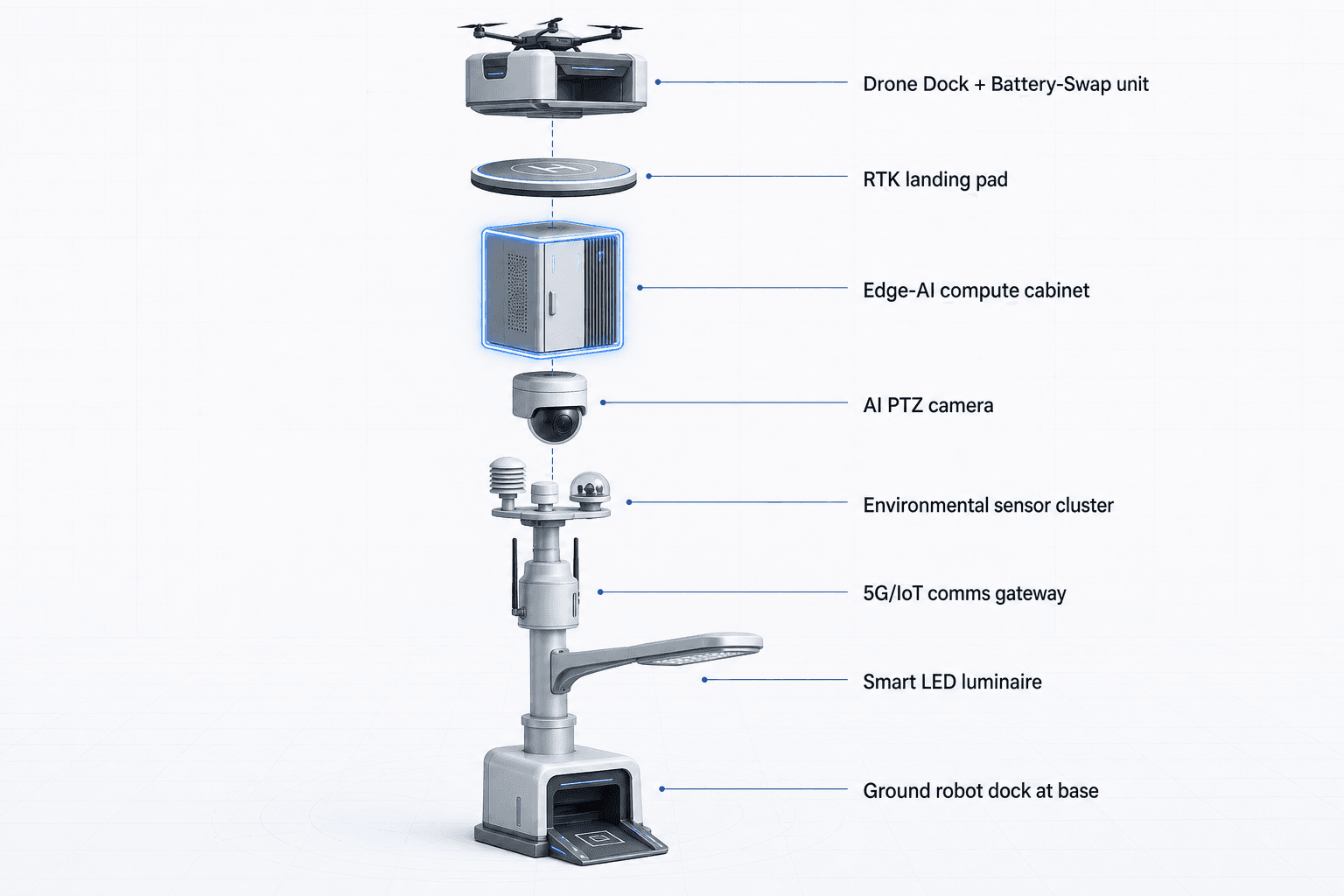
시스템 구성
| 항목 | 구성 |
|---|---|
| 폴 형태 | SOLARTODO Sentinel Sky Hub PURE 스마트 폴, 비조명 city-ai-pole 엣지 노드 |
| 에너지 시스템 | 360-degree 유연 CIGS 태양광 보충을 갖춘 완전 독립형 배터리 기반 마이크로 스테이션 |
| 엣지 AI 컴퓨팅 | 로컬 이벤트 스코어링, 워크로드 스케줄링 및 미션 로그를 위한 폴 장착 Jetson급 추론 캐비닛 |
| 보안 센싱 | 익명 차량 수, 군중 밀도, 침입 및 경계 인식을 위한 AI PTZ 카메라 |
| 환경 모니터링 | 풍속, 풍향, 온도, 습도, 대기압, 소음, PM10, PM2.5 및 조도 |
| 드론 및 로봇 운영 | 자율 드론 이륙 및 배터리 핫스왑과 폴 베이스의 지상 로봇 순찰 및 무선 충전 |
| 데이터 처리 | 원시 영상 및 센서 데이터는 폴에서 처리되며, 비식별화된 이벤트 및 상태 메타데이터만 노드를 떠날 수 있음 |
작동 방식
- 폴 장착 PTZ와 환경 센서가 하천 횡단면 지점의 야간 이상 징후를 표시합니다.
- Edge AI가 이벤트를 로컬에서 분류하고 우선순위를 스코어링하며 원시 영상 및 센서 스트림을 폴에 유지합니다.
- 인간 운영자가 common-operating-picture 뷰에서 비식별화된 알림을 검토하고 대응을 승인합니다.
- 폴은 배터리 예비량과 경로 허가에 따라 드론 출동, 지상 로봇 순찰 또는 둘 다를 스케줄링합니다.
- 미션 로그, 환경 수치 및 비식별화된 이벤트 메타데이터가 검토용 증거 패키지로 묶입니다.
- 운영자가 이벤트를 종료, 에스컬레이션 또는 재작업 지시하는 동안 노드는 유지보수 및 에너지 상태를 업데이트합니다.
계획 가정(참고용)
구매자가 다시 계산할 수 있는 예시 계획 입력값으로, 달성 결과가 아닌 목표 지표입니다. 최종 엔지니어링 확인 대상입니다.
| 지표 | 계획 가정 | 참고 값 |
|---|---|---|
| 점검 인력 | 드론 순찰이 선정된 하천 횡단면 지점의 정기 수동 야간 순찰 통과를 대체 | 주당 약 10 to 20회 순찰 통과 자동화 |
| 증거 검토 | Edge AI가 연속 센싱을 운영자 검토용 비식별화 이벤트 패키지로 필터링 | 주당 약 30 to 60개 이벤트 패키지 검토 |
| 현장 출동 규율 | 로봇 또는 드론의 1차 확인 미션이 현장 팀 파견 전 맥락을 제공 | 주당 약 5 to 15회 1차 확인 미션 |
| 에너지 듀티 사이클 | 고출력 드론 및 로봇 작업은 배터리 예비량과 일일 태양광 보충에 맞춰 스케줄링 | 하루 약 6 to 9 kWh 태양광 계획 입력값 |
| 휴일 급증 커버리지 | 각 폴에 현장 운영자를 추가하지 않고 휴일 기간 동안 야간 순찰 작업 큐를 확대 | 야간 약 2 to 3개 우선순위 시간대 |
배치 장비
- SOLARTODO Sentinel Sky Hub 비조명 폴 본체
- 유연 CIGS 태양광 랩 및 배터리 저장 캐비닛
- 폴 장착 엣지 AI 컴퓨팅 모듈
- AI PTZ 카메라 어셈블리
- 9개 파라미터 환경 센서 스위트
- 다중 베이 배터리 핫스왑 매거진을 갖춘 자율 드론 베이
- 지상 로봇 무선 충전 인터페이스
- OTATODO edge OS common-operating-picture 콘솔
자주 묻는 질문
SOLARTODO Sentinel Sky Hub는 스마트 가로등입니까?
아니요. Sky Hub는 조명 시스템이 없는 PURE 스마트 폴입니다. 이 무스카트 구성에서는 센싱, 엣지 컴퓨팅, 드론 운영, 지상 로봇 운영 및 증거 워크플로 조정을 위한 city-ai-pole 및 물리 AI 도시 엣지 노드로 취급됩니다. 조명 자산으로 지정하거나 가로등 대체품으로 조달해서는 안 됩니다.
완전 독립형 에너지 설계는 무스카트 조건에서 어떻게 작동합니까?
폴은 배터리 저장장치와 약 15 square meters의 360-degree 래핑형 유연 CIGS 박막 태양광 보충을 결합합니다. 이 수직 원통형 형태의 경우 현실적인 맑은 하늘 출력은 고일사 조건에서 대략 0.8 to 1.1 kW DC peak 및 하루 약 6 to 9 kWh로 계획됩니다. 드론 및 로봇 작업은 여전히 저장 예비량에 맞춘 듀티 사이클 스케줄링이 필요합니다.
생태환경 야간 순찰 이벤트 중 어떤 데이터가 폴을 떠납니까?
의도된 데이터 처리 패턴은 로컬 처리 우선입니다. 원시 영상 및 센서 스트림은 폴에 남고, 그곳에서 edge AI가 추론, 이벤트 스코어링 및 증거 패키징을 수행합니다. 구매자의 운영 정책과 최종 법률 검토에 따라 비식별화된 이벤트 메타데이터, 상태 메타데이터, 미션 로그 및 승인된 증거 요약만 노드를 떠날 수 있습니다.
각 노드에 운영자가 상주하지 않아도 휴일 급증을 지원할 수 있습니까?
예. 제안된 구성은 원격 인간 승인을 통한 무인 노드 운영을 위해 설계되었습니다. 휴일 기간 동안 작업 큐는 하천 횡단면 순찰, 환경 이상 확인, 드론 1차 확인 미션 및 지상 로봇 후속 조치를 우선순위로 둘 수 있습니다. 인간 운영자는 common-operating-picture 뷰를 통해 승인, 에스컬레이션 및 종료 결정을 계속 담당합니다.
증거 수집에서 엣지 컴퓨팅의 역할은 무엇입니까?
엣지 컴퓨팅은 첫 검토를 위해 연속 원시 데이터를 중앙 시스템으로 이동해야 할 필요를 줄입니다. 폴 장착 모듈은 로컬 이벤트를 분류하고, 카메라, 드론 및 로봇 워크로드를 스케줄링하며, 비식별화된 증거 패키지를 생성합니다. 이는 민감한 원시 스트림을 노드에 유지하면서 생태환경 팀을 위한 더 일관된 기록을 지원합니다.
이 구성에서 Counter-UAS 조정은 어떻게 처리됩니까?
폴은 자체 센싱과 승인된 선택형 파트너 센서 입력을 통해 무단 드론을 감지하고 추적할 수 있습니다. 레이더는 폴에 내장되어 있지 않습니다. 모든 완화 조치는 인간 승인 및 비살상 기반이며, 정의된 운영 규칙에 따라 우호 드론에 소프트 공중망 포획 또는 근접 접근 억제를 수행하도록 명령하는 방식 등이 포함됩니다.
구매자는 파일럿 구성에서 영구 서비스로 전환하기 전에 무엇을 평가해야 합니까?
구매자는 횡단면 현장 적합성, 비행 허가, 로봇 경로 안전, 통신 계획, 태양광 노출, 저장 예비량, 환경 센서 보정, 증거 보존 정책 및 인간 승인 워크플로를 확인해야 합니다. 가장 중요한 평가 질문은 노드가 불필요한 원시 데이터 이동을 만들지 않으면서 순찰 일관성과 증거 품질을 개선하는지 여부입니다.
더 알아보기
거리, 캠퍼스 또는 공공장소에 유사한 피지컬 AI 배치를 계획 중이신가요? 엔지니어링 상담 요청