
이 사례에서 SOLARTODO Sentinel인 City AI Pole은 센싱, 폴 내 추론, 드론 도킹, 지상 로봇 도킹, 하이브리드 전원 옵션을 하나의 도시 자산에 결합한 통합 물리 AI 엣지 노드 폴입니다. 제안된 나이로비 배치는 악천후로 인한 중단 이후 산업단지 경계 모니터링을 지원하며, 생태·환경 팀이 순찰, 증거 수집, 커버리지 평가를 조정하도록 돕습니다.
조달 맥락
이 제안형 나이로비 사례는 악천후, 홍수, 잔해 이동, 유틸리티 중단 또는 일시적 접근 제약 이후 더 빠른 경계 복구가 필요한 산업단지 캠퍼스를 위한 조달 평가로 구성되었습니다. 목표 구매자는 생태·환경 이해관계자 그룹입니다. 즉, 배수로, 서비스 도로, 하역 구역, 녹지 완충지대, 연료 취급 구역, 경계 펜스 주변 상태를 문서화해야 하는 현장 환경 관리자, 카운티 대응 컴플라이언스 팀, 안전 담당자, 시설 운영자가 포함됩니다.
계절적 트리거는 나이로비에 맞게 신중히 다루는 태풍 시즌 대비입니다. 나이로비 자체는 태풍대에 속하지 않습니다. 이 조달 사례에서 이 표현은 다국적 입주사와 물류 팀이 시장 전반의 악천후 연속성 계획을 동기화하기 위해 채택한 지역 회복탄력성 일정으로 사용됩니다. 현지에서의 엔지니어링 관심사는 강우, 바람, 유출수, 고인 물, 폭풍 피해, 그리고 강한 기상 이벤트 이후 발생할 수 있는 접근 중단입니다. 배치 방식은 재난 후 보강 배치입니다. 즉, Sentinel 폴은 기존의 모든 조명 폴이나 카메라를 한 번에 교체하는 대신, 중단 상황으로 인해 캠퍼스 경계의 사각지대가 드러난 후 우선순위가 높은 공백에 추가됩니다.
핵심 문제는 부서 간 사일로입니다. 환경 팀은 점검 로그를 보유하고, 보안 팀은 영상을 보유하며, 시설 팀은 순찰 일정을 관리하고, 운영 팀은 사고 전화를 가장 먼저 받을 수 있습니다. 복구 기간에는 이러한 분리가 의사결정을 늦춥니다. 따라서 조달 목표는 드론, 로봇 또는 카메라를 별도 장비로 구매하는 것이 아닙니다. 최종 엔지니어링 확인을 전제로, 공유 가능한 경계 증거 계층을 생성할 수 있는 하나의 통합 도시 엣지 노드 폴을 평가하는 것입니다.
현장 시나리오
이 시나리오는 창고, 경공업, 물류, 주차, 서비스 야드 활동이 혼재된 나이로비 산업단지 주변의 캠퍼스 경계 경로를 다룹니다. 가장 관련성이 높은 경계는 대외 출입구만이 아닙니다. 후면 배수 통로, 비공식 보행로 옆 펜스 라인, 임시 계약업체 접근 지점, 유틸리티 캐비닛, 암거, 폐기물 처리 코너, 산업 부지와 인접 도로 또는 주거지 사이의 완충 구역도 포함됩니다.
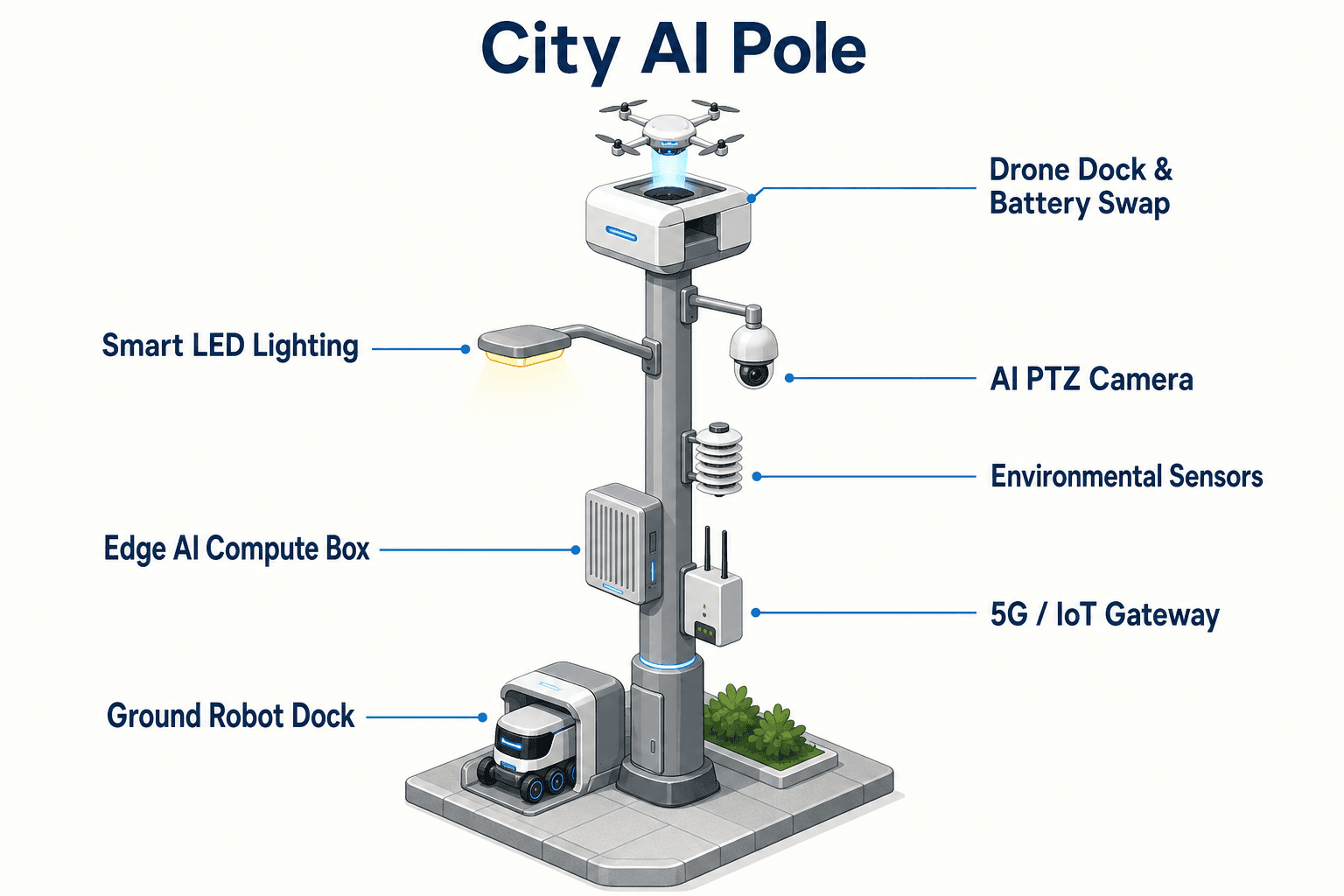
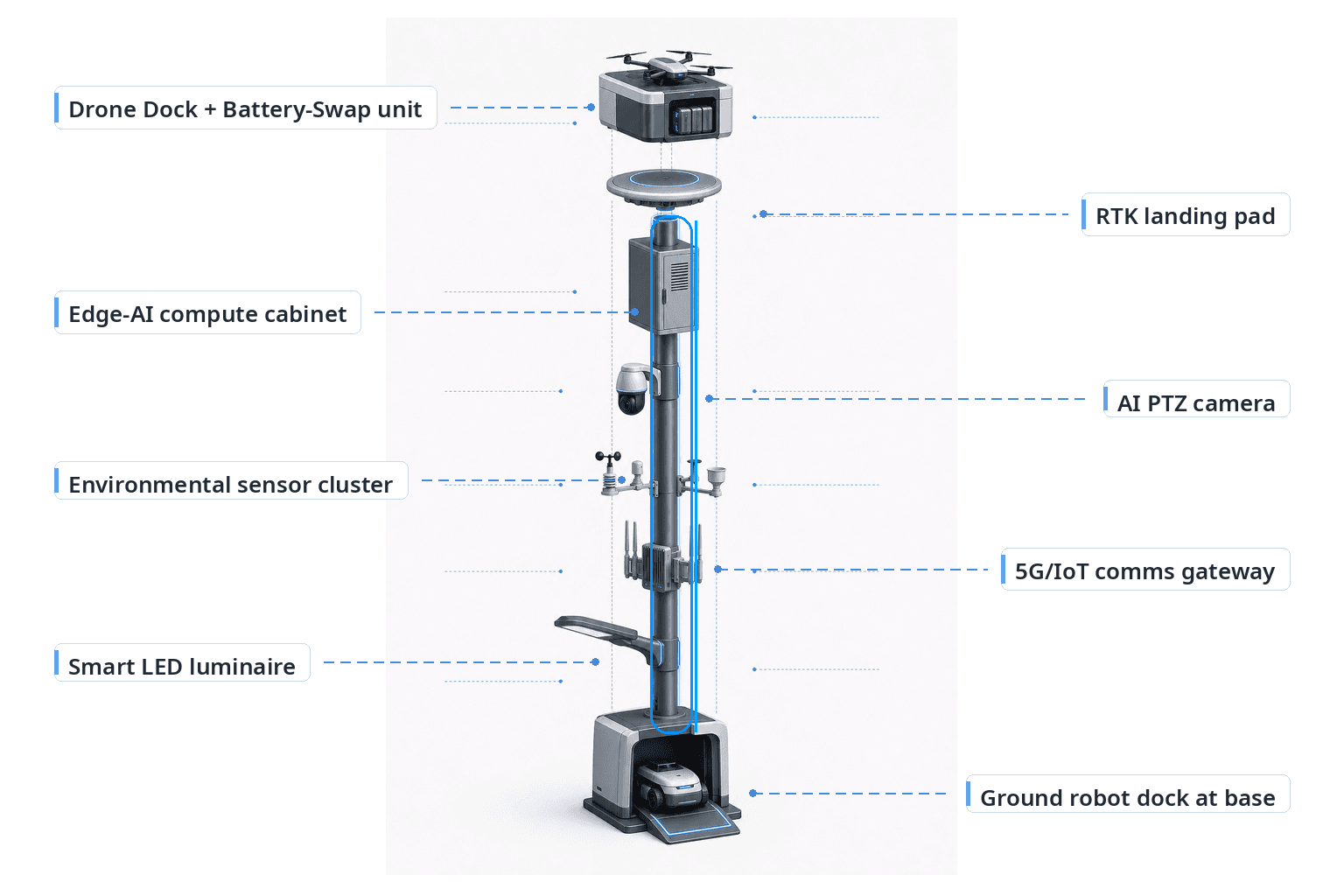
악천후 이벤트 이후 수동 점검은 종종 분절됩니다. 보안은 접근 통제에 집중하고, 환경 담당자는 유출수나 누출 위험에 집중하며, 시설 작업반은 막힌 배수로나 손상된 조명을 우선 처리할 수 있습니다. 제안된 SOLARTODO Sentinel 배치는 동일한 물리적 위치에서 관찰, 순찰, 기록이 가능한 폴로 선택된 공백을 메웁니다. Sentinel 폴은 브러시드 메탈 본체, 미드나이트 블루 태양광 중간 섹션, 시안 LED 액센트 링, 클램셸 지붕이 있는 흰색 SOLARTODO 드론 도크, 그리고 베이스의 지상 유닛 도킹 위치를 갖습니다. B2B 배치에서 시각적 정체성은 중요합니다. 경비원, 유지보수 팀, 입주사, 방문 계약업체가 이 자산을 산업단지 회복탄력성 시스템의 일부로 인식해야 하기 때문입니다.
이 사용 사례에서는 지상 로봇이 모듈의 초점입니다. 일반 사족보행 또는 바퀴형 순찰 로봇은 자동 충전을 위해 폴 베이스에 도킹하며, 트럭, 적재 자재, 식생, 임시 펜스 또는 고인 물로 인해 고정 카메라 시야가 가려지는 구역을 점검하도록 배정됩니다. 드론은 상공 점검과 경로 확인을 위해 통합 폴의 일부로 남아 있지만, 조달 사례는 지상 수준 증거에 중점을 둡니다. 즉, 펜스 무결성, 배수구에 쌓인 잔해, 접근 장애, 민감 보관 구역 인근의 물 고임, 그리고 고정형 고위치 카메라가 포착하지 못할 수 있는 근거리 상태 기록입니다.
제안 구성
제안된 Sentinel 구성은 엔지니어링 확인을 전제로 하는 맞춤형 프로젝트 설계입니다. 폴은 독립형 드론 시스템이나 독립형 순찰 로봇이 아니라 하나의 도시 엣지 노드로 취급됩니다. 각 노드는 폴 본체, 센싱, 온디바이스 추론, 드론 도크, 지상 로봇 도크, 전원 경로, 로컬 증거 워크플로를 통합합니다.
상단에서는 흰색 SOLARTODO 도크와 클램셸 지붕이 임무 사이에 일반 쿼드콥터를 보호합니다. 드론은 정밀 RTK 착륙 패드와 빠른 자동 배터리 교체를 위한 배터리 핫스왑 매거진을 사용하여, 명시된 교체 시간에 의존하지 않고 다운타임을 줄입니다. 드론은 경로 개요, 지붕선 점검, 접근 불가능한 경계 확인을 위해 이륙할 수 있지만, 통합 폴 배치의 일부로 유지됩니다.
베이스에서는 순찰 로봇이 도킹하고 자동 충전됩니다. 이 지상 유닛은 캠퍼스 경계 시나리오를 중심으로 구성됩니다. 짧은 점검 루프, 저속 근접 관찰, 작업 완료 시 또는 시스템이 가용성을 보존해야 할 때 도크로 복귀하는 동작이 포함됩니다. 생태·환경 구매자에게 로봇의 가치는 반복 가능한 상태 수집에 있습니다. 각 기상 이벤트 이후 동일한 점검 경로를 따라가며 배수로, 토양 교란, 폐기물 구역, 경계 식생, 저지대 접근 지점에 대한 비교 가능한 기록을 팀에 제공합니다.
폴 캐비닛에는 환기형 인클로저 안에 임베디드 엣지 AI 가속기가 포함됩니다. 시스템은 모든 이벤트에 대해 클라우드 왕복을 요구하지 않고 저지연 의사결정을 위해 온디바이스 추론을 수행합니다. PTZ 카메라, 기상 및 환경 센서 패키지, 선택형 4D radar / LiDAR가 감지 계층을 지원합니다. 전원은 현장 부하, 음영, 유틸리티 가용성, 최종 엔지니어링 검증에 따라 계통 연결 또는 풍력-태양광 하이브리드일 수 있습니다.
커버리지 KPI
이 조달 사례의 KPI 프레이밍은 커버리지입니다. 커버리지는 계획된 우선순위 경계 체크포인트, 점검 경로, 이벤트 기록 중 고정 폴 센서로 관찰하거나, 지상 로봇이 도달하거나, 조건상 상공 시야가 필요할 때 드론이 확인할 수 있는 비율로 정의됩니다. 이는 평가 지표이며, 달성된 결과를 주장하는 것이 아닙니다.
나이로비 산업단지의 경우 커버리지는 단순한 지도 반경이 아니라 운영 현실을 중심으로 계획해야 합니다. 배수 보호구역 옆의 긴 경계는 내부 서비스 도로를 향한 깨끗한 벽보다 더 빈번한 지상 점검이 필요할 수 있습니다. 경비원이 있는 게이트는 이미 사람이 볼 수 있지만, 후면 암거는 폭우 후 센서 확인이 필요할 수 있습니다. 하역 야드는 낮에는 PTZ 카메라에서 보일 수 있지만, 야간에는 주차된 트레일러와 임시 자재 때문에 시각적으로 복잡해질 수 있습니다. Sentinel 노드는 이러한 차이를 부서들이 함께 평가할 수 있는 커버리지 계획으로 전환하는 방법으로 제안됩니다.
부서 간 사일로 문제는 하나의 감지-판단-조치-기록 루프를 사용하여 해결합니다. 환경 팀은 점검 우선순위를 정의하고, 보안 팀은 경계 이상을 검증하며, 시설 팀은 유지보수 증거를 받고, 운영 팀은 연속성 상태를 검토합니다. 지상 로봇은 특히 고정 카메라가 부분적으로 가려지거나 재난 후 잔해로 인해 현장 배치가 달라진 경우, 낮은 높이에서 폴의 점검 범위를 확장하여 커버리지 KPI를 개선합니다.
조달 중 구매자는 최종 설계 전에 목표 체크포인트, 순찰 시간대, 예외 범주, 데이터 보존 규칙, 에스컬레이션 역할을 설정해야 합니다. 그런 다음 엔지니어링 확인을 통해 폴 배치, 로봇 경로 안전성, 드론 이륙 제약, 무선 또는 유선 백홀, 전원 회복탄력성, 설치 허가, 환경 노출을 검증해야 합니다.
조달 경로
신뢰할 수 있는 조달 경로는 공동 경계 조사에서 시작됩니다. 현장 팀은 알려진 재난 후 공백을 표시합니다. 침수 코너, 손상된 펜스 구간, 유출수 경로, 어두운 구역, 교통 충돌 구역, 수동 순찰 보고가 자주 늦거나 불완전하게 도착하는 장소가 포함됩니다. 그런 다음 생태·환경 이해관계자는 기술 선호가 아니라 점검 중요도에 따라 이러한 공백의 순위를 매깁니다.
두 번째 단계는 노드 구성 워크숍입니다. SOLARTODO Sentinel은 필요한 센서 조합, 임베디드 엣지 AI 가속기, 드론 도크, 지상 로봇 도크, 전원 모드를 갖춘 완전한 물리 AI 폴로 지정되어야 합니다. 이 사례의 가치는 경계에서 조정된 증거 수집에 달려 있으므로, 명확한 통합 계획이 없는 한 구매자는 요구사항을 별도 장치 묶음으로 분리하는 것을 피해야 합니다.
세 번째 단계는 평가 프로토콜입니다. 설치 전에 부서들은 커버리지를 어떻게 테스트할지 합의합니다. 어떤 체크포인트를 포함할지, 어떤 순찰 루프를 범위에 넣을지, 무엇이 예외를 만드는지, 누가 로봇 또는 카메라 발견 사항을 검토하는지, 내부 환경 거버넌스를 위해 어떤 기록을 보존해야 하는지를 정합니다. 이를 통해 배치가 한 부서만 소유하는 또 다른 사일로가 되는 것을 방지합니다.
마지막 단계는 엔지니어링 확인입니다. 나이로비 현장 조건은 배수, 먼지, 접근 통제, 도로 기하, 무선 환경, 음영, 입주사 활동, 유틸리티 안정성에 따라 크게 달라질 수 있습니다. 따라서 제안된 배치는 토목, 전기, 안전, 공역, 통신, 운영 절차가 확인될 때까지 예시적 조달 사례로 취급되어야 합니다. 기대 가치는 정성적이고 운영적입니다. 더 나은 공유 가시성, 더 일관된 재난 후 점검, 그리고 경계 커버리지를 평가하는 더 명확한 방법입니다.
시스템 구성
| 항목 | 구성 |
|---|---|
| 폴 형태 | 미드나이트 블루 태양광 중간 섹션과 시안 LED 액센트 링을 갖춘 슬림한 원통형/팔각형 브러시드 메탈 폴 |
| 엣지 AI 컴퓨팅 | 온디바이스 추론 및 저지연 로컬 의사결정을 위한 임베디드 엣지 AI 가속기가 포함된 폴 내 환기형 캐비닛 |
| 드론 유닛 | 클램셸 지붕, 일반 쿼드콥터, 정밀 RTK 착륙 패드, 배터리 핫스왑 매거진을 갖춘 흰색 SOLARTODO 도크/네스트 |
| 지상 유닛 | 경계 점검 루프를 위해 자동 충전 기능과 함께 폴 베이스에 도킹되는 일반 사족보행 또는 바퀴형 순찰 로봇 |
| 센싱 | 선택된 경계 조건을 위한 PTZ 카메라, 기상/환경 센서, 선택형 4D radar / LiDAR |
| 전원 | 현장 부하와 엔지니어링 확인을 전제로 한 계통 연결 또는 풍력-태양광 하이브리드 구성 |
작동 방식
- 폴 내 PTZ 카메라 또는 환경 센서가 경계 이상을 표시합니다.
- 임베디드 엣지 AI 가속기가 이벤트를 로컬에서 분류하고 검토 우선순위를 부여합니다.
- 지상 로봇이 베이스 도크를 떠나 체크포인트를 근거리에서 점검합니다.
- 드론은 접근, 지붕선 또는 경로 맥락을 위해 상공 확인이 필요할 때만 이륙합니다.
- 노드는 생태·환경, 보안, 시설, 운영 검토를 위해 동기화된 증거를 기록합니다.
- 팀은 이벤트를 종료하고 커버리지 맵을 업데이트하며 다음 순찰 계획을 조정합니다.
계획 가정(참고용)
구매자가 다시 계산할 수 있는 예시 계획 입력값으로, 달성 결과가 아닌 목표 지표입니다. 최종 엔지니어링 확인 대상입니다.
| 지표 | 계획 가정 | 참고 값 |
|---|---|---|
| 점검 커버리지 | 목표 우선순위 체크포인트를 배치 전에 매핑하고 고정 카메라, 지상 로봇 또는 드론 확인에 배정합니다 | 캠퍼스 단계당 약 20-40개 체크포인트 계획 |
| 지상 순찰 빈도 | 지상 로봇은 악천후 이벤트 이후 및 복구 교대 중 반복 가능한 경계 루프를 수행하도록 일정이 설정됩니다 | 활성일당 약 3-6회 순찰 루프 |
| 수동 에스컬레이션 부하 | 엣지 검토와 로컬 증거 수집 이후 분류된 예외만 사람 팀에 에스컬레이션됩니다 | 약 5-10개 예외 범주 정의 |
| 증거 일관성 | 부서들이 환경, 보안, 시설 검토를 위한 공통 기록 필드에 합의합니다 | 노드당 약 1개의 공유 이벤트 로그 |
| 재난 후 보강 우선순위 | 초기 폴 배치는 이전 접근 중단, 침수 노출 또는 경계 사각지대로 입증된 공백에 집중합니다 | 배치 순서를 위한 약 3개 우선순위 등급 |
배치 장비
- 태양광 중간 섹션을 갖춘 SOLARTODO Sentinel 스마트 폴 본체
- 클램셸 지붕이 있는 흰색 SOLARTODO 드론 도크/네스트
- RTK 착륙 지원 기능을 갖춘 일반 쿼드콥터
- 드론 운영을 위한 배터리 핫스왑 매거진
- 베이스 자동 충전 도크를 갖춘 지상 순찰 로봇
- PTZ 카메라 및 기상/환경 센서 패키지
- 임베디드 엣지 AI 가속기를 갖춘 환기형 엣지 AI 캐비닛
- 선택형 4D radar / LiDAR 모듈
자주 묻는 질문
이것은 드론 프로젝트인가요, 로봇 프로젝트인가요?
아닙니다. 이 조달 사례는 통합 도시 엣지 노드 폴인 SOLARTODO Sentinel을 대상으로 합니다. 드론과 지상 로봇은 폴 시스템의 모듈이며, 폴 내 센싱, 엣지 추론, 도킹, 전원, 증거 워크플로의 지원을 받습니다. 나이로비 시나리오는 악천후 이후 캠퍼스 경계 조건이 근거리 점검을 요구하는 경우가 많기 때문에 지상 로봇을 강조합니다.
왜 구매자를 생태·환경 이해관계자로 설정하나요?
목표 문제는 보안 침입만이 아닙니다. 나이로비의 산업단지 운영자는 중단을 초래하는 기상 상황 이후 유출수, 막힌 배수로, 폐기물 구역 상태, 펜스 라인 교란, 환경 예외도 문서화해야 합니다. 생태·환경 이해관계자는 공유 증거 루프를 사용해 별도의 현장 기록을 유지하지 않고도 보안, 시설, 운영과 조정할 수 있습니다.
이 배치는 부서 간 사일로를 어떻게 해결하나요?
제안된 워크플로는 감지부터 점검 및 종료까지 하나의 운영 기록을 생성합니다. 카메라 또는 센서가 이벤트를 표시하고, 엣지 AI가 이를 로컬에서 분류하며, 지상 로봇이 근거리 증거를 수집하고, 부서들이 동일한 이벤트 기록을 검토합니다. 이 구조는 별도의 순찰 메모, 영상 클립, 유지보수 관찰이 서로 disconnected systems로 흩어지는 것을 방지하는 데 도움이 됩니다.
이 사례에서 재난 후 보강 배치란 무엇을 의미하나요?
재난 후 보강 배치는 기존 인프라의 균일한 교체를 가정하는 대신, 중단으로 드러난 경계 공백에 Sentinel 폴을 제안한다는 의미입니다. 구매자는 먼저 사각지대, 차단된 접근 경로, 배수 노출, 점검 지연을 식별한 다음 목표 커버리지를 개선할 수 있는 위치에 노드를 배치합니다. 최종 배치는 엔지니어링 확인을 전제로 합니다.
조달 중 커버리지는 어떻게 평가해야 하나요?
커버리지는 체크포인트, 순찰 경로, 예외 범주, 증거 기록 전반의 계획 지표로 평가해야 합니다. 구매자는 어떤 경계 위치에 고정 관찰이 필요한지, 어떤 위치에 지상 로봇 점검이 필요한지, 어떤 위치에 드론 확인이 필요한지 정의할 수 있습니다. 조달 팀은 수치를 달성된 배치 결과가 아니라 테스트할 목표 입력값으로 취급해야 합니다.
나이로비가 태풍대가 아닌데 왜 태풍 시즌을 언급하나요?
이 사례에서 태풍 시즌은 나이로비의 현지 사이클론 노출에 대한 주장이 아니라, 지역 운영 전반의 악천후 대비를 위한 조달 일정으로 사용됩니다. 나이로비의 엔지니어링 기반은 산업단지 연속성과 환경 점검에 영향을 줄 수 있는 강우, 바람, 유출수, 홍수, 접근 중단, 잔해 조건에 초점을 맞춰야 합니다.
더 알아보기
거리, 캠퍼스 또는 공공장소에 유사한 피지컬 AI 배치를 계획 중이신가요? 엔지니어링 상담 요청