
City AI Pole в данном сценарии для Лиссабона — это периферийный узел физического ИИ SOLARTODO Sentinel: одна интегрированная smart-опора, объединяющая датчики на опоре, встроенный edge-AI inference, устойчивые коммуникационные рабочие процессы, док-станцию для дрона и патрульного робота с базовой док-станцией. Предлагаемое развертывание поддерживает контроль границ в рамках городского управления вокруг периметра кампуса в CBD во время сетевой нагрузки, связанной с тепловой волной.
Задача в CBD Лиссабона и межведомственная потребность
Это иллюстративное развертывание в Лиссабоне сформулировано вокруг задачи городского управления, а не покупки продукта: поддержание надежного контроля границ вокруг периметра муниципального кампуса в CBD, когда тепловая волна повышает операционную нагрузку, а сетевой сбой ограничивает обычный удаленный мониторинг. Целевая среда — плотная центральная городская зона, например кампус городских служб, площадка транспортных операций, административный периметр, интерфейс общественного пространства у набережной или муниципальный объект смешанного назначения рядом с улицами с высоким пешеходным потоком. В этом контексте «контроль границ» означает наблюдение за границей объекта, находящегося в управлении города: воротами, ограждениями, служебными входами, полосами доставки, краями парковок и обращенными к общественному пространству точками периметра.
Заинтересованной стороной является не одна служба безопасности. Работоспособное развертывание по замыслу должно быть межведомственным. Городское управление отвечает за сервисную цель и бюджетную дисциплину. Муниципальная безопасность определяет правила эскалации. Команды эксплуатации объектов отвечают за электропитание, размещение опор, доступ к базе и окна технического обслуживания. IT- и коммуникационные команды определяют поведение сети при частичной или полной потере backhaul. Команды мобильности и общественных пространств проверяют, как маршруты патрулирования робота обходят пешеходов, пандусы, бордюры, велосипедные полосы и ночные скопления людей. Юридические специалисты и специалисты по защите данных определяют, что записывается, хранится, маскируется или передается на эскалацию.
Сезонным триггером является тепловая волна. В Лиссабоне периоды высокой температуры могут продлевать активность на открытом воздухе до более поздних часов, усиливать нагрузку на транспортные коридоры и повышать важность бесперебойных операций по периметру городских объектов. Тепловая волна также может выявить слабые места в коммуникационных шкафах, планировании электропитания и доступности персонала. Болевая точка в этом кейсе — сетевой сбой: если центральная видеоплатформа, backhaul-канал или облачный маршрут недоступны, традиционная модель удаленного мониторинга может потерять видимость именно тогда, когда операционные условия становятся менее терпимыми к сбоям.
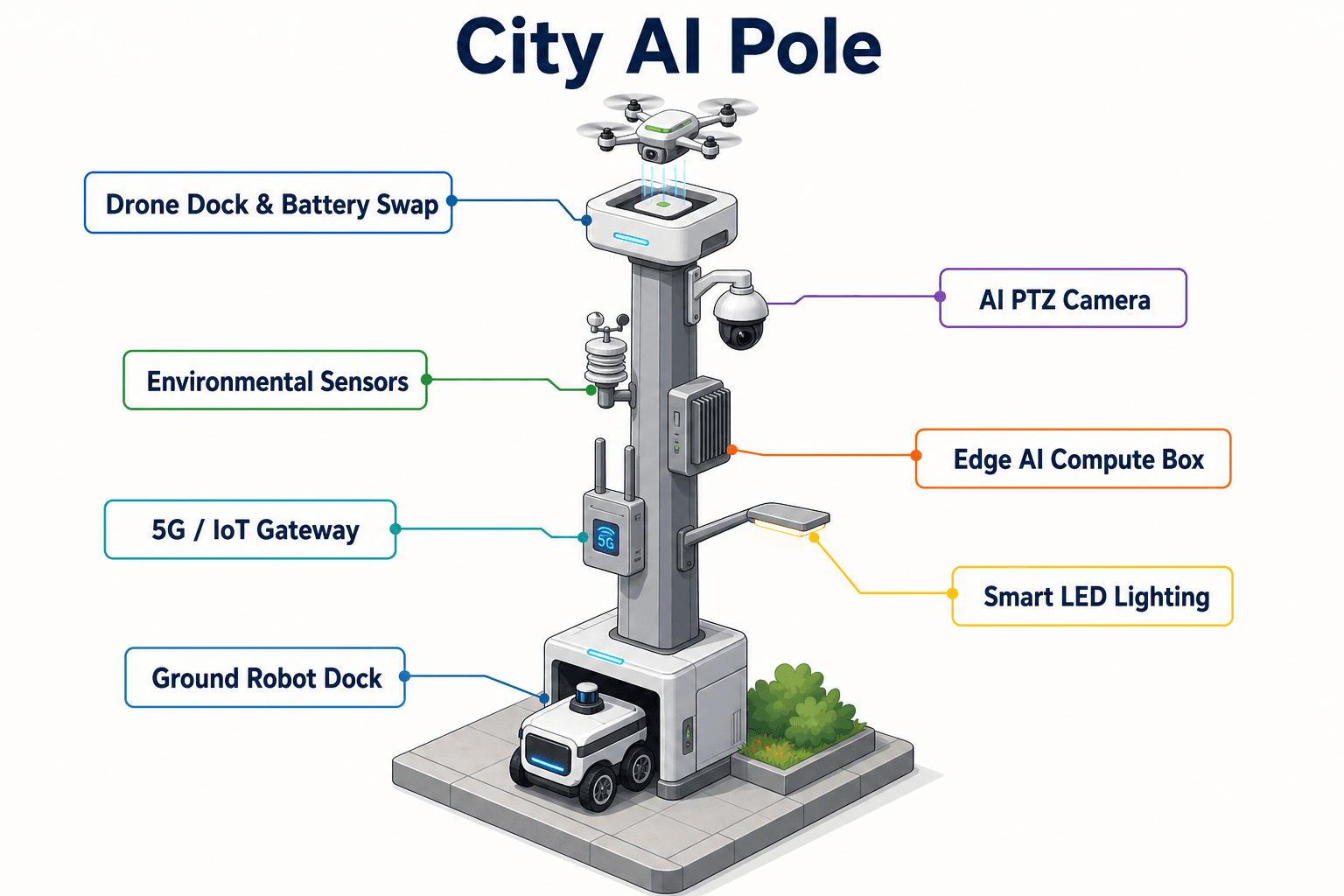
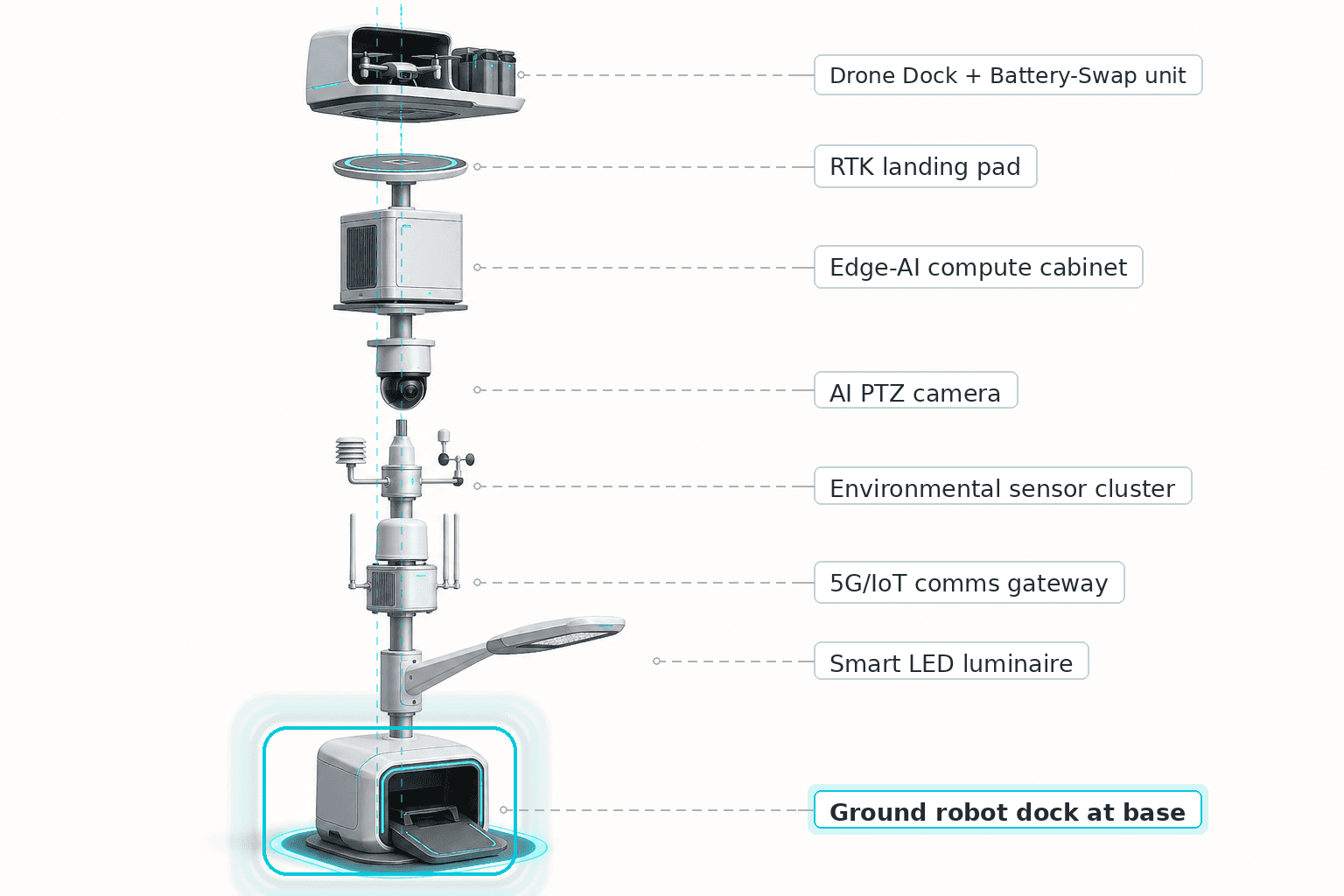
Предлагаемый ответ — развертывание по периметру кампуса опор-периферийных узлов Physical-AI SOLARTODO Sentinel. Каждый узел представляет собой тонкую цилиндрическую или восьмиугольную smart-опору с корпусом из брашированного металла, полуночно-синей фотоэлектрической средней секцией, циановыми LED-акцентными кольцами, интегрированной док-станцией для дрона сверху, док-станцией для патрульного робота у основания, датчиками на опоре и встроенным edge-AI inference. В кейсе опора рассматривается как интегрированная городская инфраструктура. Здесь она не продается как отдельный комплект дрона или отдельный комплект робота; робот и дрон являются модулями в настраиваемой городской системе периферийных узлов, с учетом окончательного инженерного подтверждения.
Роботизированный контроль периметра в условиях сбоя
Основным операционным модулем в этом кейсе является патрульный робот. Робот размещен в док-станции у основания опоры с автозарядкой и используется для расширения наблюдения узла от фиксированной точки до коротких, повторяемых патрульных циклов вокруг границы кампуса. В кампусе CBD Лиссабона это может означать проверку служебных ворот, утопленных дверных проемов, временных барьеров, погрузочных входов, слепых зон вдоль ограждения и участков, где фиксированная PTZ-камера может потерять линию видимости из-за уличной мебели, припаркованных автомобилей, уклона или толпы.
Операционный сценарий намеренно узкий: контроль границ периметра кампуса во время сетевого сбоя. Робот не заменяет регламенты, охрану или экстренные службы. Он обеспечивает мобильный слой sensing и присутствия, который городские команды могут локально задействовать, когда edge-AI система опоры фиксирует аномалию или когда логика планового патрулирования требует проверки маршрута. Робот может быть четвероногим или колесным, в зависимости от поверхностей объекта, переходов через бордюры, уклона, ограничений докования и правил общественного пространства. Окончательная форма должна быть подтверждена в ходе инженерной проверки.
Опора SOLARTODO Sentinel поддерживает этот рабочий процесс, поскольку принятие решений не полностью зависит от обращения в облако и обратно. Встроенный edge-AI accelerator на опоре выполняет inference локально в вентилируемом шкафу. PTZ-камера, погодный и экологический датчик, а также опциональный 4D-радар или LiDAR передают данные на периферийный узел, чтобы система могла классифицировать события, присваивать им оценку и запускать локальные действия даже при ухудшении backhaul. Это важно для OPEX, потому что дорогостоящий сценарий отказа — не только инцидент, но и модель ручного реагирования, создаваемая неопределенностью. Если каждый сбой требует дополнительного патрульного персонала, повторных проверок руководителем и ручных обходов периметра, операционные затраты быстро растут.
Для городского управления Лиссабона роботизированный подход следует оценивать как механизм контроля OPEX. Цель — меньше ненужных ручных обходов периметра, меньше отправок персонала вслепую и более эффективная приоритизация рабочего времени сотрудников в периоды тепловых волн. Формулировка KPI должна опираться на плановые входные данные и метрики оценки: количество автоматизированных патрульных циклов в неделю, количество предотвращенных дублирующих проверок, процент событий, обработанных локально, количество эскалаций в период сбоя и часы технического обслуживания на узел. Здесь не заявляется достигнутый результат; это категории оценки для предлагаемого пилота или закупочной спецификации.
Коммуникационная конфигурация узла Sentinel
Фокус модуля в этом предлагаемом развертывании — связь. На практике это не означает позиционирование опоры как телекоммуникационного продукта или изобретение фиксированной сетевой архитектуры. Это означает настройку узла Sentinel так, чтобы городская задача продолжалась контролируемым образом, когда обычный сетевой маршрут недоступен. Ключевой принцип проектирования — локальная непрерывность: локально собирать данные, локально выполнять inference, локально принимать решения там, где это допускается политикой, локально отправлять робота и записывать события для последующей синхронизации после восстановления связи.
Шкаф edge-AI является центральным элементом этой коммуникационной стратегии. Поскольку inference выполняется на опоре, узел может продолжать обрабатывать входные данные камер и датчиков, не ожидая облачного анализа. Во время сбоя backhaul он может приоритизировать локальные оповещения, инструкции по отправке робота, видеоклипы событий и статусные журналы. После восстановления связи система может передать сохраненные записи в выбранную городом операционную среду с учетом правил управления данными и хранения. Это предлагаемое поведение должно быть проверено во время инженерного подтверждения и приемочных испытаний.
Визуальная форма также имеет значение при развертывании в CBD. Sentinel специфицируется как одна тонкая цилиндрическая или восьмиугольная опора с корпусом из брашированного металла, полуночно-синей фотоэлектрической средней секцией и циановыми LED-акцентными кольцами. Сверху расположена белая док-станция или nest для дрона SOLARTODO с крышей-ракушкой, точной посадочной площадкой RTK и магазином горячей замены батарей для быстрой автоматизированной смены батареи без указания фиксированного времени замены. Наземный модуль докуется у основания. Размещение этих модулей в одной городской опоре снижает потребность в разрозненных шкафах, временном оборудовании или нескольких несвязанных полевых активах.
Планирование электропитания остается специфичным для объекта. Sentinel может питаться от электросети или от ветро-солнечной гибридной конфигурации. В Лиссабоне окончательный выбор будет зависеть от затенения, ограничений городского ландшафта, историко-культурного контекста, ветровой нагрузки, доступности электропитания, доступа для обслуживания и правил строительных работ. Фотоэлектрическая средняя секция является частью архитектуры опоры, но ее не следует рассматривать как универсальную гарантию электропитания. Работу во время тепловой волны следует проверять с учетом вентиляции шкафа, рабочего цикла батареи, времени доступности датчиков, надежности докования и безопасного доступа в общественном пространстве.
Межведомственная операционная модель
Достоверное развертывание зависит от согласованных операционных правил до установки. Городское управление должно определить цель контроля периметра и модель оценки OPEX. Безопасность должна определить, что считается аномалией низкого, среднего или высокого приоритета. IT должно определить режимы сбоев, допустимое поведение локальной обработки и правила синхронизации. Эксплуатация объектов должна подтвердить фундаменты опор, возможность подключения к электросети или гибридного электропитания, доступ к шкафу и графики очистки. Команды общественных пространств должны подтвердить, что маршруты робота не конфликтуют с пешеходами, доступными маршрутами, аварийным доступом, велосипедными потоками или временными схемами мероприятий.
Предлагаемый рабочий процесс можно организовать в трех операционных состояниях. В нормальном режиме PTZ-камера и датчики мониторят периметр кампуса, робот выполняет плановые или событийные патрули, а записи проходят через стандартный городской сетевой маршрут. В режиме ухудшенной сети встроенный edge-AI accelerator продолжает on-device inference, опора приоритизирует локальное принятие решений, а робот по-прежнему может быть отправлен на определенные проверки. В режиме восстановленной сети сохраненные данные событий и журналы синхронизируются в соответствии с утвержденной политикой. Такая структура помогает ведомствам решить, что должно оставаться доступным в условиях сбоя, а что может подождать.
Дрон включен как часть интегрированной опоры, но основной темой здесь остается робот. Док-станция дрона может поддерживать инспекцию сверху там, где это разрешено и инженерно проработано, используя белую док-станцию SOLARTODO с крышей-ракушкой, посадочной площадкой RTK и автоматизированным магазином горячей замены батарей. Для плотного периметра кампуса в CBD Лиссабона использование дрона может быть более ограниченным, чем использование робота, из-за воздушного пространства, общественной безопасности, погоды и правил объекта. Поэтому практический дизайн не должен полагаться на полет как на единственный механизм непрерывности.
Обработка данных должна быть определена как часть спецификации городского управления. Кейс поддерживает on-device inference и действие с низкой задержкой без обращения в облако и обратно, но правила записи, редактирования, сроки хранения, контроль доступа и ответственность за эскалацию должны быть установлены покупателем и локальной проверкой соответствия. Систему следует оценивать как операционную конфигурацию периферийного узла, а не как автономный орган принятия решений. Руководители-люди остаются ответственными за политические решения, экстренную эскалацию и любые действия, требующие формального вмешательства.
Оценка OPEX и готовность к пилоту
OPEX-кейс должен строиться на пересчитываемых допущениях, а не на заявленной экономии. Покупатель в Лиссабоне может смоделировать текущую частоту ручных патрулей периметра, риск сверхурочной работы во время тепловых волн, дублирующие проверки при сетевых сбоях, частоту ложных отправок, визиты обслуживания и простои. Предлагаемое развертывание Sentinel тогда становится контролируемым пилотным вопросом: может ли интегрированная опора с локальным inference, докованным патрульным роботом, устойчивыми коммуникационными рабочими процессами и заданной записью событий сократить время персонала, затрачиваемое на проверку событий периметра с низкой достоверностью?
Пилот по периметру кампуса должен начинаться с обследований объекта, а не с заявлений о количестве. Инженерные команды должны подтвердить линию видимости, геометрию маршрута робота, место докования, фундамент опоры, электросетевое или ветро-солнечное гибридное питание, вентиляцию шкафа, ракурсы камер, необходимость опционального 4D-радара или LiDAR, поведение резервной связи и доступ для обслуживания. Покупатель также должен определить условия остановки: погодные пороги, ограничения общественных мероприятий, окна тестирования сетевых сбоев и процедуры ручного переопределения.
Закупочная формулировка должна оставаться конкретной и аккуратной. Покупатель приобретает не типовую опору с камерой, не отдельный дрон и не отдельного робота. Предлагаемый актив — SOLARTODO Sentinel, Physical-AI City Edge Node с интегрированным sensing, edge compute, док-станцией для дрона, док-станцией для наземного робота, вариантами электропитания и локальным inference. Конфигурация является индивидуальной и подлежит инженерному подтверждению. Из этого иллюстративного кейса не следует выводить цены, гарантии покрытия, показатели обнаружения или операционные результаты.
Для городского управления Лиссабона полезным результатом пилота стала бы рамка принятия решений: какие задачи периметра можно автоматизировать, какие требуют проверки человеком, какие условия сбоя узел может выдержать и какие входные параметры OPEX изменяются достаточно, чтобы обосновать расширение. Самый важный вывод состоит в том, что коммуникационный дизайн и операционная модель робота должны специфицироваться вместе. Во время сетевого сбоя в период тепловой волны робот операционно полезен только в том случае, если периферийный узел все еще может обнаруживать, принимать решения, действовать и записывать в контролируемом локальном цикле.
Конфигурация системы
| Параметр | Конфигурация |
|---|---|
| Корпус опоры | Тонкая цилиндрическая или восьмиугольная опора из брашированного металла с полуночно-синей фотоэлектрической средней секцией и циановыми LED-акцентными кольцами |
| Edge AI compute | Вентилируемый шкаф на опоре со встроенным edge-AI accelerator для on-device inference и локальных решений с низкой задержкой |
| Модуль робота | Типовой докованный патрульный робот у основания опоры с автозарядкой, настроенный для проверок маршрутов по периметру кампуса |
| Модуль дрона | Белая док-станция SOLARTODO с крышей-ракушкой, типовой квадрокоптер, посадочная площадка RTK и автоматизированный магазин горячей замены батарей |
| Пакет sensing | PTZ-камера, погодный и экологический датчик, с опциональным 4D-радаром или LiDAR по результатам обследования объекта |
| Вариант электропитания | Питание от сети или ветро-солнечная гибридная конфигурация, при условии инженерного подтверждения для объекта в Лиссабоне |
| Непрерывность связи | Локальный inferencing, приоритизация событий и рабочий процесс сохранения с последующей передачей для периодов ухудшенной сети |
Как это работает
- PTZ-камера или опциональный радар/LiDAR фиксирует аномалию периметра на границе кампуса в CBD.
- Встроенный edge-AI accelerator классифицирует событие и присваивает ему оценку локально без обращения в облако и обратно.
- Если политика позволяет, опора отправляет докованного патрульного робота для проверки ворот, линии ограждения или служебного входа.
- Во время сетевого сбоя узел приоритизирует локальные оповещения и сохраняет доказательства события для последующей синхронизации.
- Городской руководитель проверяет запись, подтверждает статус эскалации и обновляет журнал оценки OPEX.
Допущения планирования (ориентировочно)
Иллюстративные исходные данные, которые покупатель может пересчитать, — целевые показатели, а не достигнутые результаты. Подлежит окончательному инженерному подтверждению.
| Показатель | Допущение планирования | Ориентировочное значение |
|---|---|---|
| Трудозатраты на инспекцию | Патруль робота автоматизирует выбранные проверки периметра, которые иначе требовали бы ручных обходов | ~10-20 патрульных циклов/неделю целевым образом для автоматизации |
| Реагирование на сбой | Локальный edge inference снижает количество отправок вслепую, когда центральный мониторинг или backhaul недоступны | ~25-40% проверок низкого приоритета целевым образом для локальной верификации |
| Проверка руководителем | Клипы событий и статусные журналы робота ставятся в очередь на проверку после восстановления связи | ~1 консолидированный пакет проверки на событие сбоя |
| Комплектование персоналом во время тепловой волны | Автоматизированные патрульные окна покрывают поздневечерние проверки периметра в периоды высокой температуры | ~2-4 вечерних патрульных окна/неделю целевым образом |
| Планирование обслуживания | Интегрированная опора, док-станция, зарядка робота и edge-шкаф проверяются в рамках одного выезда полевого обслуживания | ~1 плановый визит обслуживания/узел/месяц как плановый входной параметр |
Развёрнутое оборудование
- Корпус smart-опоры SOLARTODO Sentinel с фотоэлектрической средней секцией и LED-акцентными кольцами
- Вентилируемый edge-AI inference шкаф на опоре
- Пакет PTZ-камеры и погодного/экологического датчика
- Опциональный sensing-модуль 4D-радара или LiDAR
- Белая док-станция для дрона SOLARTODO с крышей-ракушкой и посадочной площадкой RTK
- Типовой квадрокоптер с интеграцией автоматизированного магазина горячей замены батарей
- Типовой патрульный робот с базовым докованием и автозарядкой
- Пакет подключения к электросети или ветро-солнечному гибридному электропитанию
Часто задаваемые вопросы
Это реальный результат развертывания в Лиссабоне?
Нет. Это предлагаемая и иллюстративная B2B-конфигурация развертывания для планирования городского управления Лиссабона. Она не заявляет присужденный проект, установленное количество, достигнутый показатель обнаружения, зону покрытия, имя клиента, сертификацию или операционный результат. Цель — показать, как SOLARTODO Sentinel может быть специфицирован для задачи контроля границ периметра кампуса в CBD, при условии окончательного инженерного подтверждения.
Почему робот является основным модулем для этого сценария в Лиссабоне?
Робот является основным модулем, потому что задача — контроль границ периметра кампуса, где фиксированные камеры могут пропускать утопленные ворота, служебные входы, тени от припаркованных автомобилей или временные барьеры. Докованный патрульный робот может выполнять короткие проверочные циклы от основания опоры, снижая потребность в ручных проверках во время тепловых волн и в условиях ухудшенной сети, сохраняя контроль за руководителями-людьми.
Как система работает во время сетевого сбоя?
Предлагаемая конфигурация опирается на inference на опоре, а не на обязательное обращение в облако и обратно. Встроенный edge-AI accelerator локально обрабатывает входные данные датчиков, оценивает события, отправляет робота там, где это разрешено политикой, и сохраняет записи событий для последующей синхронизации. Точное поведение при сбое, маршрутизация оповещений, хранение и резервная связь должны быть подтверждены IT- и инженерными командами покупателя.
Заменяет ли SOLARTODO Sentinel охрану или команды экстренного реагирования?
Нет. Sentinel — это интегрированная городская опора-периферийный узел, предназначенная для поддержки обнаружения, верификации, автоматизации патрулирования и ведения записей. Она не заменяет человеческие полномочия, экстренные службы или решения муниципальной политики. В этом кейсе робот помогает проверять события периметра с низкой достоверностью, чтобы персонал мог приоритизировать реагирование на основе более качественных локальных доказательств.
Можно ли использовать дрон как основной инструмент инспекции?
Дрон является частью интегрированной опоры SOLARTODO Sentinel с белой док-станцией, крышей-ракушкой, посадочной площадкой RTK и автоматизированным магазином горячей замены батарей. Однако этот сценарий для Лиссабона является роботизированным, потому что плотные условия CBD могут ограничивать полеты. Использование дрона следует рассматривать как опциональное и зависящее от правил объекта, проверки безопасности, погоды и инженерного подтверждения.
Что должно измерять городское управление Лиссабона в пилоте?
Покупатель должен измерять плановые KPI, а не заранее предполагать экономию: предотвращенные ручные патрули, события периода сбоя, проверенные локально, время проверки руководителем, визиты обслуживания, завершение маршрутов робота и качество эскалации. Эти входные данные позволяют городу пересчитать влияние на OPEX с использованием собственной модели трудозатрат, операционного плана для тепловой волны, сетевой архитектуры и сервисных требований.
Узнать больше
- Линейка опор City AI / умного освещения
- Другие кейсы развёртывания умного города
- Связаться с нашей инженерной командой
Планируете аналогичное развёртывание физического ИИ для улиц, кампусов или общественных пространств? Запросить инженерную консультацию