
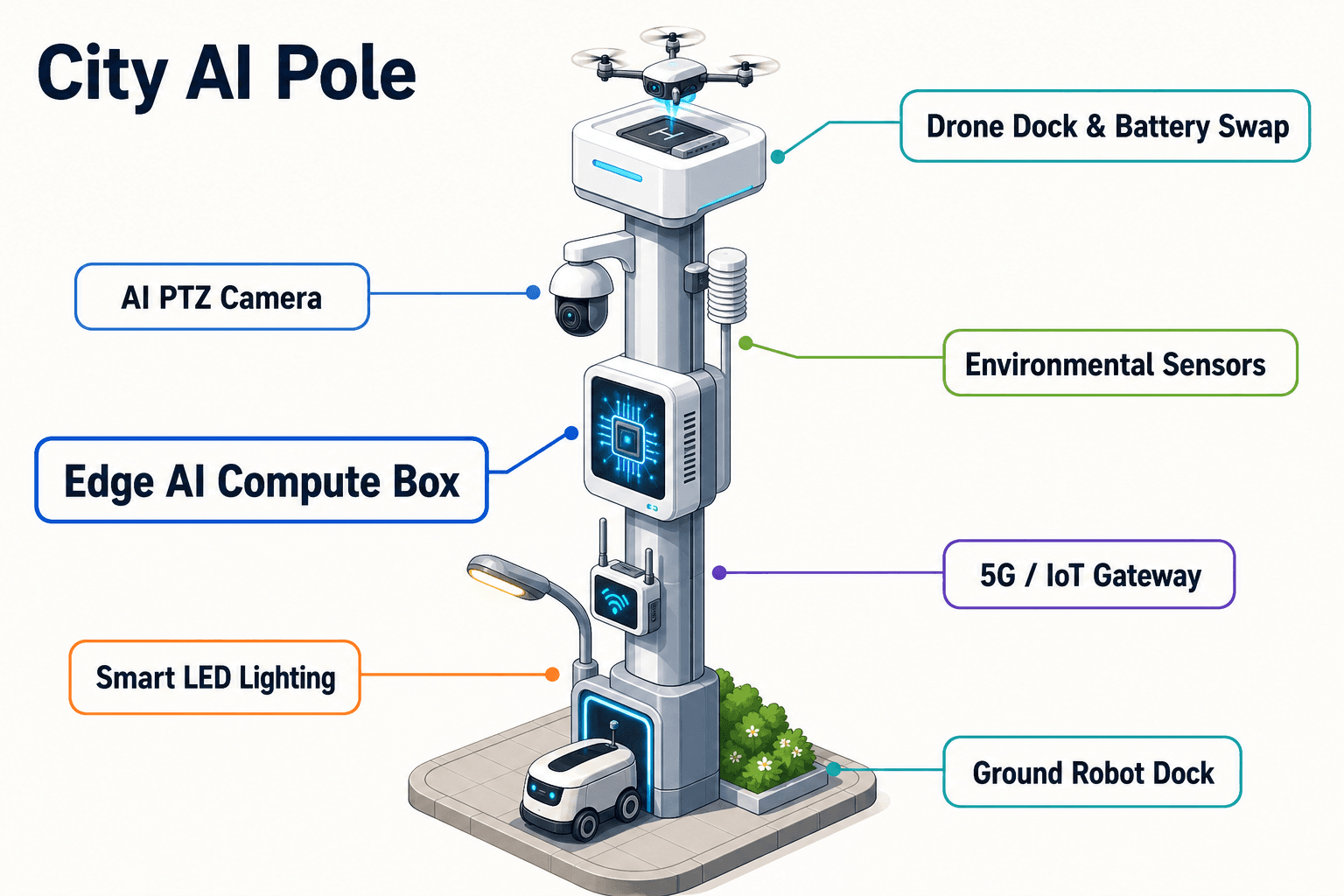
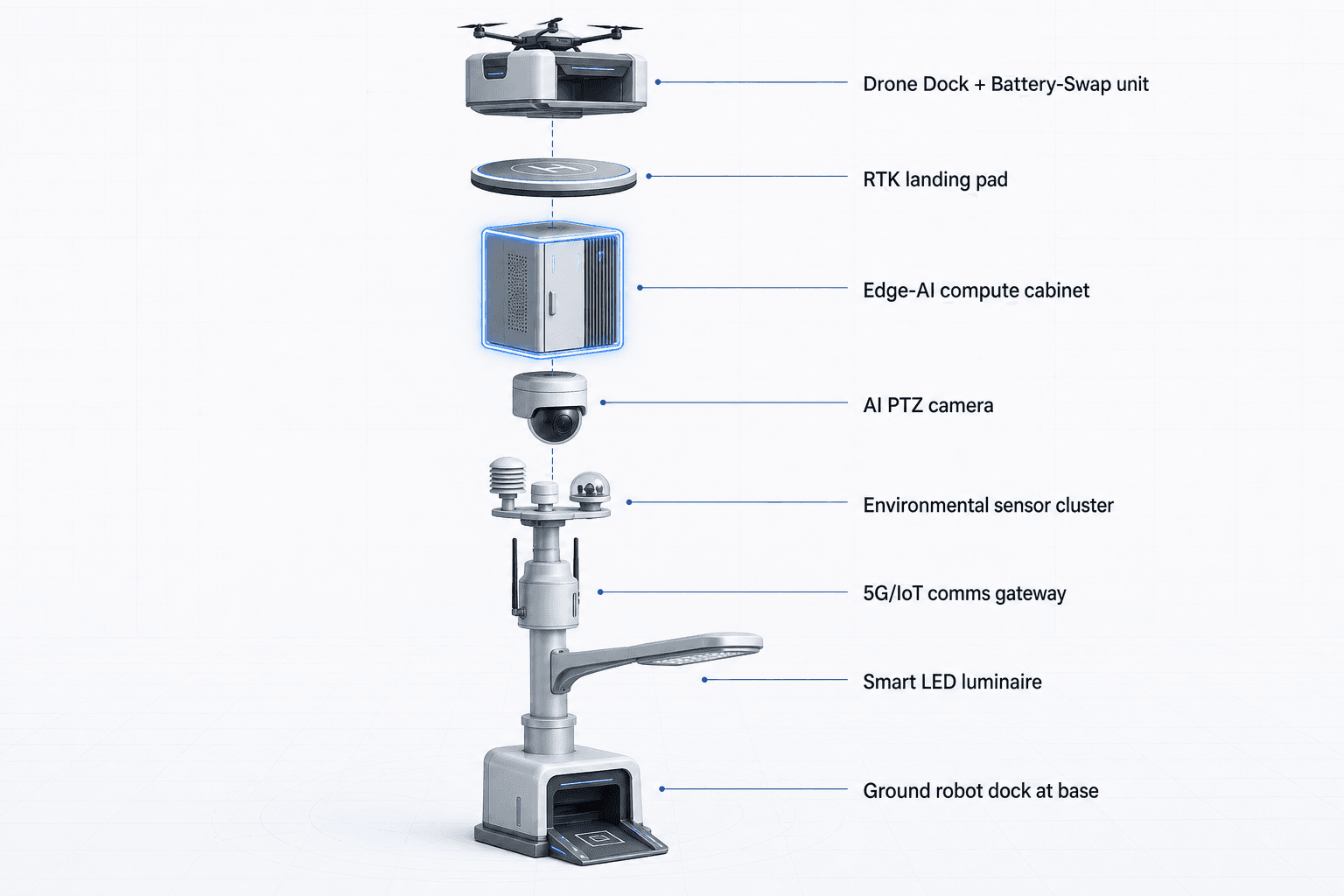
City AI Pole — это полностью автономный физический ИИ edge-узел, объединяющий локальное сенсорное наблюдение, edge-вычисления, солнечную подпитку с аккумуляторным резервированием, эксплуатацию дронов и эксплуатацию роботов в форм-факторе опоры без освещения. В данной конфигурации для Маската SOLARTODO Sentinel Sky Hub поддерживает праздничное ночное патрулирование в точках поперечных сечений речных русел старого города, локально обрабатывая доказательные данные и передавая только обезличенные метаданные событий и статуса.
1. Контекст пилота: старый город Маската, праздничные ночи и доказательные данные на речных поперечных сечениях
Данная конфигурация пилотного отчета подготовлена для экологического стейкхолдера, отвечающего за операции ночного патрулирования в старом городе Маската, Оман. Фокусом не являются дорожное освещение, декоративное оформление улиц или типовая демонстрация smart-city. Городская задача уже и более операционная: разместить физические ИИ edge-узлы в выбранных точках поперечных сечений речных русел, где в праздничные периоды может потребоваться документирование экологических инцидентов, перемещений в нерабочее время, скопления людей, незаконного сброса, шума, дыма, пыли или несанкционированного доступа.
Старый город Маската создает практическую задачу мониторинга. Патрульным командам может требоваться охватывать прибрежные зоны, вади, дренажные переходы, общественные пространства рядом с объектами наследия, сервисные проезды и периметральные точки после наступления темноты, когда ручной сбор доказательных данных сложнее стандартизировать. Праздничный триггер меняет операционный режим: больше посетителей, более длительная вечерняя активность, временные нагрузки на сервисы и повышенная потребность в четких записях, которые можно анализировать без избыточного сбора персональных данных.
Предлагаемая конфигурация SOLARTODO Sentinel Sky Hub использует категорию city-ai-pole как городской edge-узел, а не как осветительный актив. Каждый Sky Hub представляет собой PURE smart pole без системы освещения. Его роль — размещать сенсоры, вычислительные ресурсы, накопители энергии, операции дронов, операции роботов и координацию workflow доказательных данных в единой автономной микростанции.
Пилот подлежит финальному инженерному подтверждению, особенно в части выбора площадок, ветровой нагрузки, солнечной выработки, радиопланирования, разрешений на полеты дронов, безопасности маршрутов наземных роботов и локальных операционных процедур. Цель — определить надежную модель развертывания и рамку оценки, а не заявлять уже достигнутые результаты.
2. Модель развертывания: узлы на речных поперечных сечениях как локальные станции доказательных данных
Предлагаемый режим развертывания — river-cross-section: узлы Sky Hub размещаются в выбранных точках наблюдения поперечных сечений, где экологической команде нужны воспроизводимые доказательные данные с обоих берегов, подходов к переходам или прилегающих сервисных коридоров. В Маскате это может означать дренажные каналы старого города, маршруты рядом с вади, прибрежные зоны или контролируемые периметральные переходы, где условия ночью быстро меняются.
Опора Sky Hub работает как полностью автономная станция. На вертикальном цилиндрическом корпусе высотой около 8 meters и шириной около 0.6 meters размещено около 15 square meters гибкой тонкопленочной CIGS-солнечной оболочки с охватом 360-degree. Солнечный слой является слоем подпитки, а не заявлением о неограниченной энергии. В регионах с высокой инсоляцией реалистичная выходная мощность при ясном небе для такого вертикального цилиндрического формата составляет примерно 0.8 to 1.1 kW DC peak, обычно достигая пика в середине утра или днем, а не в полдень, и около 6 to 9 kWh per day. Высокомощные задачи дронов и роботов буферизуются накопителем класса 5 to 20 kWh и планируются по duty cycle.
Такая энергетическая архитектура важна для операций в старом городе, потому что многие полезные точки мониторинга не являются удобными площадками электропитания. Подведение питания к каждому поперечному сечению добавило бы согласования, строительные работы на площадке и интерфейсы обслуживания. Sky Hub устраняет зависимость от сети, городского или объектового питания, при этом по-прежнему требуя дисциплинированного планирования duty cycle.
На каждом узле представление common-operating-picture на опоре показывает операционный цикл как sensing, authorized assessment and response, edge-compute scheduling, and field operations and maintenance. Это поддерживает китайскую операционную идею восприятия, проверки, планирования реагирования и координации как единого цикла, сохраняя при этом участие человека в принятии решений.
3. Edge-compute workflow: локальная обработка до выхода любых метаданных с опоры
Ключевой модульный фокус для данной конфигурации в Маскате — edge compute. Edge-модуль класса Jetson, в производительном уровне Orin или Thor, выполняет локальный inference, оценку событий и планирование нагрузок внутри опоры. Сырые видеопотоки и потоки сенсорных данных остаются на опоре и обрабатываются локально. За пределы узла могут передаваться только обезличенные метаданные событий, метаданные статуса, журналы и утвержденные пакеты доказательных данных в соответствии с операционной политикой.
Для экологического стейкхолдера это меняет workflow сбора доказательных данных. Вместо централизованного сбора непрерывного сырого видео и его последующего анализа опора классифицирует операционно значимые события на периферии: анонимный подсчет транспортных средств, изменение плотности скопления людей, intrusion или awareness периметра, аномальная динамика шума, изменение пыли, смена направления ветра, изменение освещенности и статус миссий операций дронов или роботов. Система по дизайну ориентирована на PDPL/LGPD, то есть предназначена для локальной обработки и минимизации данных. Это не является заявлением о сертификации или уже подтвержденном соответствии нормативным требованиям.
Сценарий ночного патрулирования может начаться с того, что PTZ-камера обнаруживает активность рядом с путем доступа к речному поперечному сечению, а экологические сенсоры показывают повышенный уровень шума и твердых частиц. Edge-модуль оценивает событие, планирует удержание сцены PTZ-камерой и выводит обезличенное оповещение в командное представление. Оператор-человек может авторизовать вылет дрона для осмотра сверху или направить наземного робота для более близкого наблюдения по разрешенному маршруту.
Задача не в том, чтобы заменить подотчетность автоматизацией. Задача в том, чтобы сделать первый пакет доказательных данных более последовательным: время, статус узла, экологические показания, сенсорный снимок, решение по миссии, авторизация оператором, журнал задачи дрона или робота и заключительная заметка. Это снижает устранимые повторения в ночном патрулировании и поддерживает более качественный анализ.
4. Операции ночного патрулирования: координация дронов, роботов и C-UAS
В периоды праздничного ночного патрулирования Sky Hub конфигурируется как edge-узел, готовый к работе с роботами и дронами. Операции дронов включают запуск, региональное патрулирование, инспекцию, возврат и повторное назначение задач для автономных вылетов без оператора, находящегося у опоры. Многосекционный аккумуляторный магазин выполняет автоматизированную замену аккумулятора с тыловым обслуживанием после посадки, позволяя дрону получить заряженный блок и повторно стартовать. Несколько секций поддерживают несколько последовательных вылетов в рамках операционного плана.
Управление операциями дронов осуществляется через планирование маршрутов, управление состоянием зарядки и замены, постановку задач в очередь, контроль состояния флота и журналы миссий. Edge-модуль планирует нагрузки так, чтобы экологическое сенсорное наблюдение, видеоаналитика, задачи дронов и задачи роботов не конкурировали вслепую за энергию или вычислительные ресурсы.
Операции наземных роботов добавляют второй уровень для доказательных данных с близкой дистанции. Гуманоидный или сервисный робот может выполнять автономное патрулирование, реагирование на тревогу, инспекцию, координацию air-ground и возвращаться к основанию опоры для беспроводной зарядки. В условиях старого города это полезно, когда обзора с дрона недостаточно и требуется наблюдение на уровне маршрута без немедленной отправки команды в зону с низкой видимостью.
Координация Counter-UAS выполняется осторожно. Опора обнаруживает и сопровождает несанкционированный дрон с помощью локального сенсорного наблюдения и любых утвержденных дополнительных входов от партнерских сенсоров. Радар не встроен в опору; он может рассматриваться только как опциональный или партнерский сенсорный вход. После авторизации человеком узел может направить собственный дружественный дрон для мягкого воздушного захвата сетью или сдерживания сближением. Подход к нейтрализации является нелетальным и авторизуемым человеком, без автономной атаки.
5. Рамка оценки: планирование с фокусом на opex, а не заявленные результаты
Opex-рамка для пилота в Маскате касается операционных усилий, повторяемости патрулирования, нагрузки на анализ доказательных данных и дисциплины выездов на место. Этот отчет не заявляет достигнутые показатели, уровни обнаружения, зону покрытия, одобрение заказчика, сертификацию или масштаб развертывания. Он предоставляет плановые допущения, которые покупатель может корректировать в ходе инженерной проработки, получения разрешений и операционного проектирования.
Для экологической команды оценка должна сравнивать текущую практику ночного патрулирования с workflow, поддерживаемым узлами. Полезные индикаторы включают количество routine patrol passes, которые можно автоматизировать, сколько экологических оповещений закрываются с достаточными доказательными данными при первом анализе, как часто удается избежать отправки человека благодаря тому, что дрон или робот собрал достаточный контекст, и насколько последовательно формируются обезличенные записи событий.
Поскольку система полностью автономна, оценка также должна включать энергетическую дисциплину: ежедневную солнечную подпитку, резерв накопителя, duty cycle вылетов дрона, duty cycle патрулирования робота, а также погодные или пылевые условия, влияющие на солнечную выработку. CIGS-оболочка с охватом 360-degree улучшает всестороннюю экспозицию, но фактическую выходную мощность в каждый момент определяет проекция, обращенная к солнцу. Покупателю следует рассматривать солнечную энергию как дополнительную подпитку для микростанции с аккумуляторным резервированием, а не как разрешение непрерывно запускать каждый высокомощный модуль.
Надежная оценка в Маскате завершается операционным решением: какие точки поперечных сечений оправдывают постоянное обслуживание узлом, какие задачи патрулирования остаются ручными, какие типы событий требуют эскалации человеку и какие поля метаданных достаточны для сбора экологических доказательных данных без вывода сырого видео за пределы опоры.
Конфигурация системы
| Параметр | Конфигурация |
|---|---|
| Форм-фактор опоры | SOLARTODO Sentinel Sky Hub PURE smart pole, edge-узел city-ai-pole без освещения |
| Энергетическая система | Полностью автономная микростанция с аккумуляторным резервированием и солнечной подпиткой на гибкой CIGS-оболочке с охватом 360-degree |
| Edge AI compute | Вычислительный шкаф on-pole класса Jetson для локальной оценки событий, планирования нагрузок и журналов миссий |
| Сенсорика безопасности | AI PTZ-камера для анонимного подсчета транспортных средств, плотности скопления людей, intrusion и awareness периметра |
| Экологический мониторинг | Скорость ветра, направление ветра, температура, влажность, атмосферное давление, шум, PM10, PM2.5 и освещенность |
| Операции дронов и роботов | Автономный запуск дрона и горячая замена аккумулятора плюс патрулирование наземным роботом и беспроводная зарядка у основания опоры |
| Обработка данных | Сырые видео- и сенсорные данные обрабатываются на опоре; за пределы узла могут выходить только обезличенные метаданные событий и статуса |
Как это работает
- PTZ-камера и экологические сенсоры на опоре фиксируют ночную аномалию в точке речного поперечного сечения.
- Edge AI локально классифицирует событие, оценивает приоритет и удерживает сырые видео- и сенсорные потоки на опоре.
- Оператор-человек просматривает обезличенное оповещение в представлении common-operating-picture и авторизует реагирование.
- Опора планирует вылет дрона, патрулирование наземного робота или оба действия с учетом аккумуляторного резерва и разрешений на маршруты.
- Журналы миссий, экологические показания и обезличенные метаданные события объединяются в пакет доказательных данных для анализа.
- Оператор закрывает, эскалирует или переназначает событие, а узел обновляет статус обслуживания и энергии.
Допущения планирования (ориентировочно)
Иллюстративные исходные данные, которые покупатель может пересчитать, — целевые показатели, а не достигнутые результаты. Подлежит окончательному инженерному подтверждению.
| Показатель | Допущение планирования | Ориентировочное значение |
|---|---|---|
| Трудозатраты на инспекцию | Патрулирование дроном заменяет routine manual night-patrol passes в выбранных точках речных поперечных сечений | ~10 to 20 patrol passes per week automated |
| Анализ доказательных данных | Edge AI фильтрует непрерывное сенсорное наблюдение в обезличенные пакеты событий для анализа оператором | ~30 to 60 event packages per week reviewed |
| Дисциплина выездов на место | Миссии первого осмотра роботом или дроном предоставляют контекст до отправки выездной команды | ~5 to 15 first-look missions per week |
| Энергетический duty cycle | Высокомощные задачи дронов и роботов планируются с учетом аккумуляторного резерва и ежедневной солнечной подпитки | ~6 to 9 kWh per day solar planning input |
| Покрытие праздничных пиков | Очереди задач ночного патрулирования увеличиваются в праздничные периоды без добавления операторов на площадке у каждой опоры | ~2 to 3 priority windows per night |
Развёрнутое оборудование
- Корпус опоры SOLARTODO Sentinel Sky Hub без освещения
- Гибкая CIGS-солнечная оболочка и шкаф аккумуляторного хранения
- On-pole edge AI compute module
- Сборка AI PTZ-камеры
- Комплект экологических сенсоров по девяти параметрам
- Автономный отсек дрона с многосекционным магазином горячей замены аккумуляторов
- Интерфейс беспроводной зарядки наземного робота
- Консоль common-operating-picture edge OS OTATODO
Часто задаваемые вопросы
Является ли SOLARTODO Sentinel Sky Hub умным уличным светильником?
Нет. Sky Hub — это PURE smart pole без системы освещения. В данной конфигурации для Маската он рассматривается как city-ai-pole и физический ИИ городской edge-узел для сенсорного наблюдения, edge computing, операций дронов, операций наземных роботов и координации workflow доказательных данных. Его не следует специфицировать как осветительный актив или закупать как замену уличному освещению.
Как полностью автономная энергетическая архитектура работает в условиях Маската?
Опора объединяет аккумуляторное хранение с примерно 15 square meters гибкой тонкопленочной CIGS-солнечной подпитки с охватом 360-degree. Для такого вертикального цилиндрического форм-фактора реалистичная выходная мощность при ясном небе планируется примерно как 0.8 to 1.1 kW DC peak и около 6 to 9 kWh per day в условиях высокой инсоляции. Задачи дронов и роботов по-прежнему требуют планирования duty cycle с учетом резерва накопителя.
Какие данные покидают опору во время события экологического ночного патрулирования?
Предусмотренная модель обработки данных — сначала локальная обработка. Сырые видеопотоки и сенсорные потоки остаются на опоре, где Edge AI выполняет inference, оценку событий и упаковку доказательных данных. За пределы узла могут передаваться только обезличенные метаданные событий, метаданные статуса, журналы миссий и утвержденные сводки доказательных данных, с учетом операционной политики покупателя и финальной юридической проверки.
Может ли система поддерживать праздничные пики без оператора у каждого узла?
Да, предлагаемая конфигурация рассчитана на необслуживаемую работу узла с удаленной авторизацией человеком. В праздничные периоды очереди задач могут приоритизировать патрулирование речных поперечных сечений, проверки экологических аномалий, first-look миссии дронов и последующие действия наземных роботов. Операторы-люди остаются ответственными за решения по авторизации, эскалации и закрытию через представление common-operating-picture.
Какова роль edge compute в сборе доказательных данных?
Edge compute снижает необходимость передавать непрерывные сырые данные в центральную систему для первичного анализа. Модуль на опоре классифицирует локальные события, планирует нагрузки камеры, дрона и робота и формирует обезличенные пакеты доказательных данных. Это поддерживает более последовательные записи для экологических команд, сохраняя чувствительные сырые потоки на узле.
Как в этой конфигурации реализована координация counter-UAS?
Опора может обнаруживать и сопровождать несанкционированный дрон с помощью собственной сенсорики и утвержденных опциональных входов от партнерских сенсоров. Радар не встроен в опору. Любая нейтрализация авторизуется человеком и является нелетальной, например команда дружественному дрону выполнить мягкий воздушный захват сетью или сдерживание сближением в рамках определенных операционных правил.
Что покупателю следует оценить перед переходом от пилотной конфигурации к постоянной эксплуатации?
Покупателю следует подтвердить пригодность площадок поперечных сечений, разрешения на полеты, безопасность маршрутов роботов, планирование связи, солнечную экспозицию, резерв накопителя, калибровку экологических сенсоров, политику хранения доказательных данных и workflow авторизации человеком. Самый важный вопрос оценки — улучшает ли узел последовательность патрулирования и качество доказательных данных без создания ненужного перемещения сырых данных.
Узнать больше
- Линейка опор City AI / умного освещения
- Другие кейсы развёртывания умного города
- Связаться с нашей инженерной командой
Планируете аналогичное развёртывание физического ИИ для улиц, кампусов или общественных пространств? Запросить инженерную консультацию