
Городская ИИ-опора / периферийный узел физического ИИ Sentinel — это тонкая интегрированная умная опора SOLARTODO, которая объединяет локальные датчики, ИИ-инференс на опоре, док-станцию для дрона, патрульного робота в док-станции и варианты питания в один объект уличной инфраструктуры. В этом предлагаемом развертывании для контроля подтоплений в историческом центре Сан-Паулу узлы отслеживают речные створы, запускают инспекцию роботом и передают доказательные данные транспортному ведомству, чтобы сократить время принятия решений.
Операционная сводка по контролю подтоплений в праздничный период
Этот иллюстративный сценарий развертывания в Сан-Паулу оформлен как план операций транспортного ведомства для исторического центра в периоды праздничных поездок и пиков розничной активности. Фокус — не универсальная витрина smart-city. Это рабочий процесс контроля подтоплений для улиц, подъездов к автобусным зонам, мостовых съездов, территорий вокруг станций и коридоров рядом с подземными или подэстакадными проездами, которые могут терять операционную надежность, когда интенсивный дождь совпадает с более плотным движением пешеходов и транспорта. Исторический центр Сан-Паулу и прилегающие старые районы находятся в плотной уличной сети, сформированной виадуками, канализированными водотоками, ручьями в коллекторах и трудными для очистки ливнеприемниками у бордюров. Когда дождевая вода накапливается рядом с пересечением, первый операционный вопрос для транспортного ведомства практичен: поддерживать движение транспорта, удерживать сервис, перенаправлять или закрывать уязвимый подход до того, как пассажиры и бригады столкнутся с предотвратимыми сбоями.
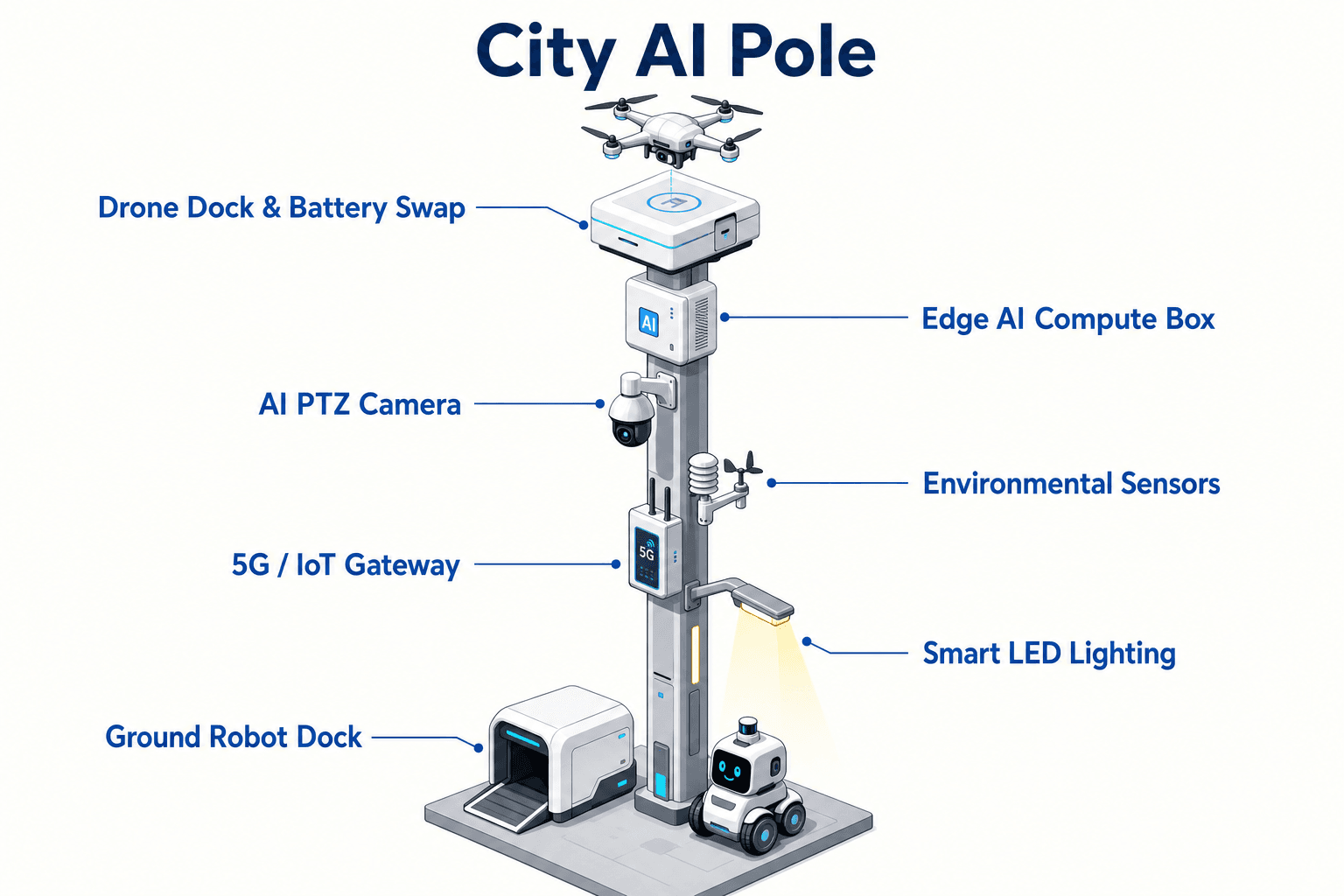
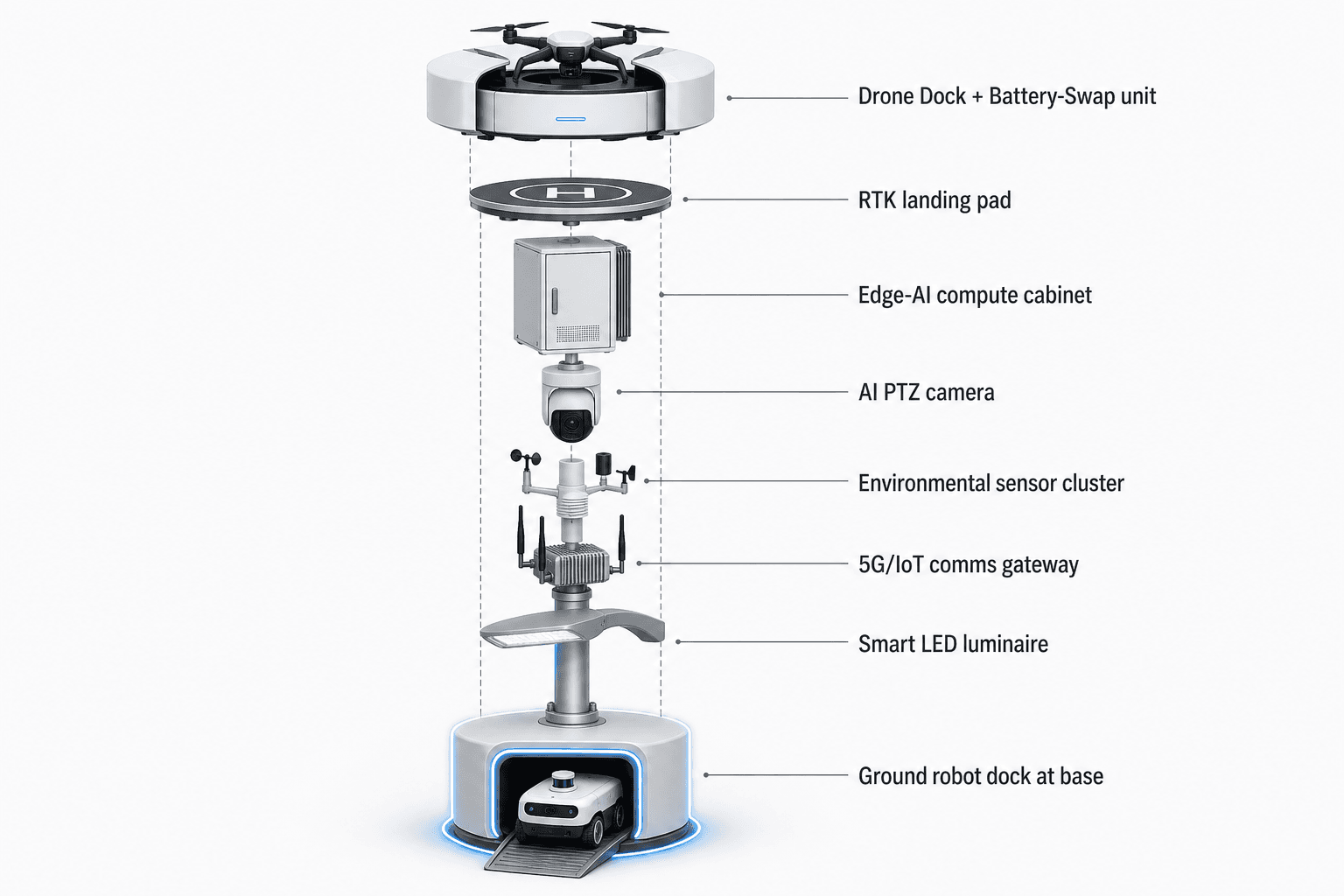
Предлагаемая конфигурация SOLARTODO Sentinel — это индивидуально проектируемая городская опора-периферийный узел, подлежащая окончательному инженерному подтверждению и позиционируемая как общая точка доказательных данных, а не ведомственное устройство. Каждая тонкая цилиндрическая или восьмигранная опора использует корпус из матового металла, полуночно-синюю фотоэлектрическую среднюю секцию и циановые светодиодные акцентные кольца. Опора объединяет датчик метео- и средовых параметров, PTZ-камеру, встроенный ускоритель периферийного ИИ, док-станцию для дрона и наземного патрульного робота в один объект уличной инфраструктуры. Для праздничного триггера операционное допущение состоит в том, что транспортному ведомству нужна более быстрая уверенность, когда несколько департаментов наблюдают один и тот же шторм с разных экранов. Погодный датчик становится первым локальным триггером, робот — полевым верификатором, а KPI времени реакции — общей мерой для команд транспорта, дренажа, гражданской обороны и событийных операций.
Шаблон развертывания по речному створу
Режим развертывания строится вокруг речного створа, то есть каждый предлагаемый узел планируется вокруг перпендикулярного операционного среза риска: кромка берега, русло или река, сопряжение с мостом или водопропускным сооружением, подъездная дорога, зона автобусной остановки, пешеходный путь, ливнеприемник у бордюра и маршрут возврата для патрулирования роботом. В Сан-Паулу этот шаблон релевантен для коридоров, на которые влияют Тиете, Пиньейрос, Тамандуатеи и более мелкие канализированные или закрытые водотоки, воздействующие на мобильность исторического центра. План не предполагает фиксированного количества опор или определенной зоны покрытия. Итоговые интервалы размещения, точки монтажа, схема питания и разрешения должны быть подтверждены по результатам инженерной проверки по гражданскому строительству, электрике, дренажу и транспорту.
Опора Sentinel в таком створе настраивается на считывание местных погодных и средовых условий, выполнение инференса на устройстве и запуск полевой верификации без ожидания цикла обмена с облаком. PTZ-камера дает операционному центру направленный обзор накопления воды, заблокированных дренажных точек, поведения трафика и рисков для пешеходов. Опциональный 4D-радар или LiDAR может оцениваться там, где видимость, геометрия или движение транспорта делают оценки только по камере недостаточными, при условии обследования площадки. Верхняя белая док-станция/гнездо SOLARTODO для дрона с крышкой-ракушкой поддерживает универсальный квадрокоптер для коротких воздушных проверок пересечения и близлежащих подходов. Точная посадочная площадка RTK и автоматизированный магазин горячей замены аккумуляторов используются для минимизации простоя без заявления фиксированной длительности замены.
Патрульный робот у основания является центральным элементом этого плана для исторического центра. На узких улицах, в затененных подземных или подэстакадных проездах и зонах у бордюров, где глубину дождевой воды или наличие мусора трудно оценить с одного ракурса камеры, робот в док-станции обеспечивает более близкую верификацию. Четвероногий или колесный форм-фактор выбирается после проверки маршрута, оценки покрытия и анализа безопасности.
Постановка задач роботу от погодного датчика
В центре модуля находится погодный датчик, но операционная ценность возникает из того, как он запускает задачу для робота. В предлагаемом рабочем процессе датчик метео- и средовых параметров не рассматривается как пассивный поток данных. Это локальный триггер, связанный с порогами контроля подтоплений, заданными транспортным ведомством и партнерскими департаментами. Когда условия приближаются к предупредительному диапазону, встроенный в опору ускоритель периферийного ИИ сопоставляет локальный сенсорный ввод с контекстом камеры и заранее определенными операционными правилами. Стандартная первичная сортировка выполняется на опоре, с низколатентным инференсом на устройстве и без обращения к облаку для первого шага классификации.
После присвоения оценки локальному событию патрульный робот может быть отправлен от основания опоры на короткий инспекционный маршрут, при условии соблюдения правил безопасности и утверждения маршрута. Робот может проверить засорение ливнеприемника у бордюра, зафиксировать стоячую воду у края автобусной полосы, осмотреть нижнюю часть подхода к мосту с разрешенного пути или подтвердить, остается ли пешеходный маршрут проходимым. Робот возвращается в базовую док-станцию для автоматической зарядки, сохраняя опору как интегрированную операционную точку вместо создания отдельной программы для роботов. Дрон остается вспомогательным модулем для контекста сверху, когда условия прямой видимости, доступа или безопасности обосновывают полет.
Для транспортного ведомства это различие важно. Одно только удаленное погодное оповещение может быть слишком абстрактным для запуска сервисного решения. Одно только сообщение с места может поступить поздно. Одно только изображение с камеры может быть оспорено другим департаментом, который смотрит на другую систему. Опора Sentinel предлагается как локальный контур доказательных данных: погодный триггер, периферийная классификация, верификация роботом, PTZ-обзор, опциональный воздушный обзор и общая запись события. Эта последовательность предназначена для сокращения времени между локальным сигналом риска и операционным решением, при этом окончательное действие остается за уполномоченным городским персоналом.
Снятие межведомственных барьеров
Ключевая болевая точка — разрозненная работа ведомств. Решения по контролю подтоплений в крупном городе часто требуют, чтобы транспортные операции, дренажное обслуживание, управление дорожным движением, гражданская оборона, общественная безопасность, подрядчики по санитарной очистке и организаторы мероприятий быстро согласовали, что происходит. В праздничный период в историческом центре ставки повышаются, потому что предотвратимая задержка может повлиять на интервалы движения автобусов, доступ к станциям, зоны такси и сервисов заказа поездок, окна доставки, маршруты экстренных служб и движение людей возле торговых улиц. Предлагаемое развертывание Sentinel не представляется как замена этих департаментов. Это полевой узел, который создает один пакет доказательных данных с временной меткой по конкретному речному створу.
Транспортное ведомство может использовать этот пакет для координации решения без необходимости просить каждую команду начинать с собственного датчика, камеры, полевого сообщения или чат-треда. Пакет может включать триггер погодного датчика, классификацию события периферийным ИИ, PTZ-снимки или видеоклипы в соответствии с локальной политикой, заметки инспекции роботом, опциональный контекст от дрона, решения оператора и последующий статус. Управление данными, сроки хранения, контроль доступа и интеграция с системами ведомства должны быть определены на этапе инженерного и политического проектирования.
Это важно, потому что KPI транспортного ведомства — время реакции, а не объем сенсорных данных. Если дренажная команда видит осадки, персонал управления движением видит затор, а полевые супервайзеры видят воду в разное время, общий вопрос формулируется с задержкой. Предлагаемая опора меняет шаблон координации, привязывая обсуждение к одному створу и одной записи инцидента. Погодный датчик запускает событие, но робот делает его операционно конкретным: он может подтвердить, идет ли речь о мокром покрытии, заблокированном пути, нарастающей водной опасности или дренажном препятствии, требующем другого ответственного исполнителя.
План оценки времени реакции
План оценки рассматривает время реакции как целевую метрику, а не как достигнутый результат. Перед развертыванием транспортное ведомство должно определить базовый процесс принятия праздничных решений по контролю подтоплений в выбранных речных створах: как сейчас поступает оповещение, кто его валидирует, кто авторизует транспортное действие и как это действие фиксируется. Затем конфигурация Sentinel оценивается относительно этой базы с использованием временных меток от погодного датчика, периферийной классификации, отправки робота, подтверждения оператором, полевого действия и отметки о закрытии. Цель — измерить, сокращает ли интегрированная опора путь принятия решения и повышает ли уверенность, при условии окончательного инженерного подтверждения.
Не заявляется конкретная доля обнаружения, улучшение времени реакции, количество развертываний или зона покрытия. Обоснованный пилот должен начинаться с плановых допущений, контролируемых операционных правил и четко определенного периода праздничного дежурства. Транспортное ведомство должно заранее определить классы маршрутов, диапазоны серьезности оповещений, условия запрета движения для робота, правила авторизации дрона и контакты для эскалации. Каждое событие анализируется на предмет того, был ли погодный триггер значимым, добавила ли верификация роботом полезный контекст, сократил ли общий пакет дублирующие обращения и было ли итоговое решение зафиксировано корректно.
С операционной точки зрения успех определяется как лучший темп и более четкая ответственность. Транспортное ведомство должно видеть, когда началось локальное условие, когда опора его классифицировала, когда робот его проверил, когда ответственная команда приняла инцидент в работу и когда было принято решение по коридору. Такая запись помогает уточнять будущие пороги, маршруты патрулирования, планы укомплектования персоналом и межведомственные операционные регламенты для следующего праздничного периода без заявления, что само оборудование решает проблему контроля подтоплений в Сан-Паулу.
Конфигурация системы
| Параметр | Конфигурация |
|---|---|
| Форма опоры | Тонкая цилиндрическая или восьмигранная опора Sentinel из матового металла с полуночно-синей фотоэлектрической средней секцией и циановыми светодиодными акцентными кольцами; итоговый монтаж подлежит инженерному подтверждению на площадке. |
| Фокус погодного датчика | Пакет датчиков метео- и средовых параметров на опоре, используемый как основной локальный триггер для порогов контроля подтоплений в речном створе Сан-Паулу. |
| Вычисления периферийного ИИ | Вентилируемый шкаф на опоре со встроенным ускорителем периферийного ИИ для инференса на устройстве, низколатентной первичной сортировки и без обращения к облаку для стандартной классификации. |
| Наземный патрульный робот | Универсальный четвероногий или колесный патрульный робот, размещенный в док-станции у основания опоры с автоматической зарядкой и настроенный для утвержденных маршрутов инспекции у бордюров и пересечений. |
| Дроновый модуль | Белая док-станция/гнездо SOLARTODO для дрона с крышкой-ракушкой, универсальным квадрокоптером, точной посадочной площадкой RTK и автоматизированным магазином горячей замены аккумуляторов. |
| Визуальное и опциональное сенсорное оснащение | PTZ-камера для направленной инспекции, с опциональным 4D-радаром или LiDAR, оцениваемыми там, где геометрия площадки и видимость требуют дополнительного сенсорного контроля. |
| Конфигурация питания | Электросетевая или ветро-солнечная гибридная схема питания, выбираемая после анализа доступа к инженерным сетям, солнечной экспозиции, ветровой осуществимости и доступа для обслуживания. |
Как это работает
- Датчик метео- и средовых параметров пересекает локально заданный порог контроля подтоплений в речном створе.
- Периферийный ИИ на опоре сопоставляет триггер с контекстом PTZ-камеры и присваивает событию оценку.
- Патрульный робот покидает базовую док-станцию по утвержденному маршруту, чтобы проверить условия у бордюра, ливнеприемника и подъезда.
- Дрон запускается только тогда, когда требуется авторизованный контекст сверху для пересечения или близлежащих подходов.
- Операционный центр транспорта получает один общий пакет события для принятия решения, маршрутизации и эскалации.
- Система фиксирует временные метки датчиков, наблюдения робота, действие оператора и статус закрытия для анализа времени реакции.
Допущения планирования (ориентировочно)
Иллюстративные исходные данные, которые покупатель может пересчитать, — целевые показатели, а не достигнутые результаты. Подлежит окончательному инженерному подтверждению.
| Показатель | Допущение планирования | Ориентировочное значение |
|---|---|---|
| Замещение инспекций роботом | Патрульный робот выполняет выбранные первичные проверки, которые иначе потребовали бы ручного наблюдения во время праздничного дежурства по подтоплениям. | ~3 to 5 инспекционных обходов за дежурство автоматизированы как плановое входное допущение. |
| Оценка времени реакции | Транспортное ведомство измеряет прошедшее время от оповещения погодного датчика до решения оператора с использованием общих временных меток события. | Плановое окно оценки ~10 to 15 минут, корректируемое по классу маршрута. |
| Межведомственная передача | Один пакет события передается командам транспорта, дренажа, гражданской обороны и полевого надзора вместо отдельных неформальных обновлений. | ~1 общая запись инцидента на валидированное оповещение. |
| Анализ праздничного дежурства | Операционные супервайзеры анализируют качество порогов, полезность робота и маршрутизацию решений во время и после каждого праздничного дежурства. | ~2 цикла анализа за период дежурства. |
| Фильтрация ручных эскалаций | Периферийная классификация и верификация роботом помогают отделять условия только для наблюдения от условий, требующих полевой эскалации. | ~4 категории оповещений для планирования: наблюдать, проверить, перенаправить, закрыть. |
Развёрнутое оборудование
- Тонкий корпус умной опоры SOLARTODO Sentinel с фотоэлектрической средней секцией и светодиодными акцентными кольцами
- Модуль датчиков метео- и средовых параметров для локального порогового контроля подтоплений
- Вентилируемый шкаф периферийного ИИ на опоре со встроенным ускорителем периферийного ИИ
- PTZ-камера для направленной инспекции коридора и пересечения
- Белая док-станция/гнездо SOLARTODO для дрона с крышкой-ракушкой, посадочной площадкой RTK и магазином горячей замены аккумуляторов
- Универсальный квадрокоптер, настроенный для авторизованных воздушных проверок контекста
- Универсальный патрульный робот в док-станции с автоматической зарядкой у основания опоры
- Опциональный модуль 4D-радара или LiDAR, подлежащий подтверждению на площадке
Часто задаваемые вопросы
Является ли этот предлагаемый проект в Сан-Паулу закупкой дронов или роботов?
Нет. Предлагаемая конфигурация — это интегрированное развертывание городской опоры, сфокусированное на SOLARTODO Sentinel как периферийном узле физического ИИ. Дрон и патрульный робот являются модулями внутри операционного рабочего процесса опоры. Они не представлены как самостоятельные продукты или отдельные программы, а их конфигурация зависит от окончательного инженерного подтверждения.
Почему транспортное ведомство является ведущим заинтересованным лицом для сценария контроля подтоплений?
Транспортное ведомство — это заинтересованная сторона, наиболее прямо отвечающая за пригодность коридоров, подъездов к автобусным зонам, мостовых съездов, доступа к станциям и маршрутов объезда во время дождевых событий. Дренажные службы могут отвечать за работы по отводу воды, но транспортные операции должны решать, перенаправлять, удерживать, ограничивать или снова открывать объекты мобильности, когда риск подтопления влияет на сервис.
Как погодный датчик улучшает KPI времени реакции?
Датчик метео- и средовых параметров обеспечивает первый локальный триггер в речном створе, поэтому событие может быть классифицировано на опоре до того, как команды будут ждать удаленного отчета или ручного сообщения с места. Он запускает измеряемую последовательность, включающую периферийную первичную сортировку, верификацию роботом, подтверждение оператором и зафиксированное транспортное решение.
Что добавляет патрульный робот по сравнению со стационарной камерой?
Стационарная PTZ-камера может инспектировать видимые зоны, но пересечение в историческом центре может включать затененные зоны у бордюров, подходы к мостам, края подземных или подэстакадных проездов, заблокированные ливнеприемники и пешеходные пути вне лучшего ракурса камеры. Робот в док-станции может выполнять утвержденный патрульный маршрут с близкого расстояния и возвращаться на автоматическую зарядку, добавляя полевой контекст в общую запись инцидента.
Требует ли опора облачной обработки для принятия первого решения?
Стандартная классификация первого этапа спроектирована для инференса на устройстве с использованием встроенного в опору ускорителя периферийного ИИ, поэтому система не зависит от цикла обмена с облаком для начальной первичной сортировки. Внешние системы при этом могут получать записи, видео и решения операторов в соответствии с политиками интеграции, управления данными и хранения транспортного ведомства.
Что необходимо подтвердить перед реальной установкой в Сан-Паулу?
Итоговое развертывание потребует инженерной проверки размещения опор, конструкции, доступа к инженерным сетям, электросетевого или ветро-солнечного гибридного питания, безопасности маршрутов робота, правил авторизации дронов, управления данными, доступа для обслуживания и интеграции с системами транспортных операций. Предлагаемый план — это настраиваемая B2B-модель развертывания, а не заявление о завершенных полевых показателях.
Узнать больше
- Линейка опор City AI / умного освещения
- Другие кейсы развёртывания умного города
- Связаться с нашей инженерной командой
Планируете аналогичное развёртывание физического ИИ для улиц, кампусов или общественных пространств? Запросить инженерную консультацию