スマート…によるBVLOSドローン運用
Cinn Song
Founder & Chief Solutions Architect

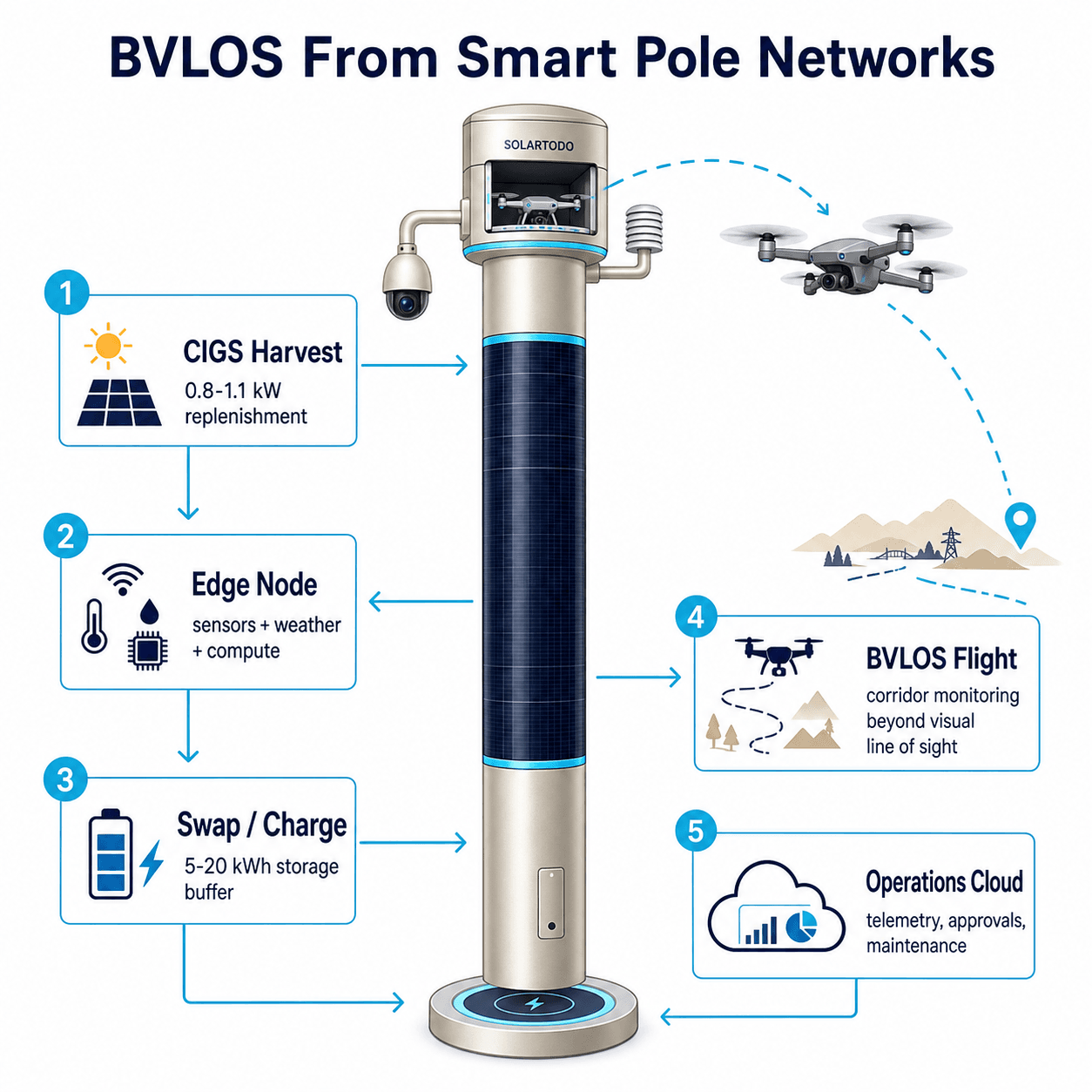
SOLARTODOスマートポールネットワークによるBVLOSドローン運用は、パイロット段階の調達およびサイト計画のベンチマークとして、0.8-1.1 kWのCIGS補充発電、5-20 kWhの蓄電、ならびにFAA BEYONDの48,383件のBVLOS飛行を活用します。
概要
SOLARTODOスマートポールネットワークによるBVLOSドローン運用は、パイロット段階の調達およびサイト計画のベンチマークとして、0.8-1.1 kWのCIGS補充発電、5-20 kWhの蓄電、ならびにFAA BEYONDの48,383件のBVLOS飛行を活用します。
重要ポイント
これら8つの調達上の要点は、BVLOSスマートポールネットワークを、エネルギー予算、承認ゲート、EPC範囲、ROI前提、パイロット段階の運用限界へと落とし込みます。
- 調達前に、コリドー長、承認経路、Remote IDの状況、少なくとも1つの人による承認ゲートに基づいてBVLOS範囲を定義する。
- 各SOLARTODO Sky Hubのエネルギー予算は、0.8-1.1 kW DCピークのCIGS出力と6-9 kWh/dayの補充発電を中心にモデル化する。
- ドローン交換、エッジコンピュート、センシング、ロボット巡回のデューティサイクルをバッファするため、ポール1本あたり5-20 kWhのバッテリー蓄電容量を設定する。
- パイロット運用は、ハードウェア準備完了、パイロット段階ワークフロー、検証を要する先行的統合という3つの成熟度階層を前提に計画する。
- エッジ処理を用いて、生の映像およびセンサーフィードの100%をポール上に保持し、匿名化されたイベントメタデータのみを送信する。
- パイロット検証後、大規模キャンパスで日常的な現地訪問を20-40%削減できると見積もり、有人巡回とポールネットワークを比較する。
- C-UASは、人が承認する非致死の検知、追跡、調整、および模擬ネット捕獲または近接接近による抑止に限定して指定する。
- EPC価格は3階層で依頼し、その後50、100、または250台に対して5%、10%、または15%の数量ガイダンスを適用する。
オフグリッドドローン運用のためのBVLOSスマートポールネットワーク
BVLOSスマートポールネットワークは、ドローン運用を単一の離陸地点から、5-20 kWhの蓄電と6-9 kWh/dayの太陽光補充発電を備えた分散型かつ承認管理型のインフラへ移行させます。SOLARTODO Sentinel / Sky Hubにおいて、自律型ドローンサービス、ロボット点検、空地連携、C-UAS対応は、別途証拠が示されない限り、実証またはパイロット段階の将来志向のコンセプト機能です。
目視外飛行運用は、単に飛行経路が長くなることではありません。航空機がどこにあり、何をしており、リスクがどのように検知され、誰が介入を許可されているのかを証明できるシステムが必要です。スマートポールネットワークが有効なのは、各ノードが電力バッファリング、ローカルコンピュート、環境センシング、機体状態、コマンド記録の固定ポイントになるためです。
SOLARTODO Sky Hubコンセプトは、照明システムを持たない純粋なスマートポールとして理解されるべきです。対象は、スマート地区、工業団地、港湾、キャンパス、都市外縁部、ユーティリティコリドー、重要インフラ区域であり、購入者が反復可能なポール形状のマイクロステーションから巡回、点検、アラーム検証、現地自律性を求める場面です。
FAA BEYONDプログラム(2025)によると、Phase 1では、2025にPhase 2が開始される前に、48,383件のBVLOS飛行を含む70,563件の飛行が記録されました。FAAはまた、「Remote ID lays the foundation」と述べており、識別、テレメトリ、管制ステーションの説明責任は調達パッケージに含めるべきです。
B2B購入者にとって、ビジネス上の課題は通常、ドローンそのものではありません。難しいのは再現性です。機体を充電し、タスクを配信し、監査ログを維持し、気象制限を監視することです。ポールネットワークは、他の重要インフラと同様にコミッショニング、点検、ガバナンスを行える運用上のアンカーを所有者に提供します。
技術アーキテクチャとデータガバナンス

BVLOS対応のSky Hubノードは、オフグリッド電力、ドローンサービス、エッジコンピュート、センシング、環境データ、ミッション制御、ロボット支援、C-UAS調整、メタデータ交換という9つの機能領域を組み合わせます。
エネルギーおよびデューティサイクルアーキテクチャ
このポールは、完全オフグリッドでバッテリーバックアップ付きのマイクロステーションとして設計されています。CIGS補充発電層は、日射条件の強い地域で約0.8-1.1 kW DCピーク、晴天空条件で約6-9 kWh/day、太陽光資源が良好な場所で年間平均およそ5-8 kWh/dayとしてモデル化するべきです。これは補充発電の予算であり、無制限の自給自足ではありません。
高出力タスクは、蓄電量とデューティサイクルに照らしてスケジュールされます。ドローンの離陸、帰還、自動バッテリー交換、エッジ推論、環境センシング、通信、地上ロボットの充電はすべて、同じエネルギー枠から電力を消費します。5-20 kWh級のバッテリーにより、CIGS層が充電状態を回復している間、システムは短時間のピークを吸収できます。
NREL PVWatts V8(2026)によると、PVモデリングは0.05-500,000 kWのシステム容量入力と時間別出力を受け付けることができます。これはサイトスクリーニングに使用し、最終的なCIGS発電量保証としては使用しません。IRENA(2026)によると、再生可能エネルギーは2025に692 GW追加され、世界の容量拡大の85.6%を占め、そのうち太陽光は約511 GWでした。IRENA事務局長Francesco La Cameraは、「renewable energy remains consistent and steadfast in its expansion」と述べています。
エッジコンピュート、プライバシー、ミッションワークフロー
エッジスタックは、Jetson級コンピュートを用いてローカル推論を実行し、ワークロードをスケジュールし、イベントルーティングを管理します。生の映像およびセンサーデータはポール上に留まります。ノード外へ出るべきなのは、匿名化されたアラート、状態メタデータ、ミッションログ、バッテリー状態、設備健全性記録のみです。
このローカル処理設計は、管制室が継続的な生データのエクスポートを前提にせずに運用上の証拠を受け取れるため、PDPL/LGPD志向のガバナンスを支援します。また、多くのイベントがルール閾値を超えるまでは低価値である環境において、帯域幅負荷も低減します。ローカル分析は、匿名の車両数、群衆密度、侵入、境界認識に限定すべきであり、能動的な顔認識やナンバープレート認識ではありません。
運用ループは、センシング、承認された評価と対応、エッジコンピュートスケジューリング、現場運用および保守です。指令センターの観点では、これはノード状態、ミッションキュー、気象制限、機体準備状況、ロボット可用性、イベント重大度、人による承認状態を示す共通運用状況図になります。
ドローンサービスとC-UASの境界
ドローンワークフローには、離陸、巡回、点検、帰還、バッテリー交換、タスク再展開が含まれます。マルチベイのバッテリーマガジンは、着陸した機体のバッテリーを充電済みパックに交換することで、複数回の連続出撃を支援できます。ミッション管理には、経路計画、交換状態、タスクキューイング、健全性テレメトリ、ログを含めるべきです。
C-UAS調整は、非致死かつ人による承認を維持しなければなりません。ポールは、搭載知覚機能と任意のパートナーセンサー入力を用いて無許可ドローンを検知および追跡し、その後、友軍ドローンによる模擬空中ネット捕獲または近接接近による抑止を調整できます。レーダーは、ポールハードウェアではなく、任意または模擬の外部入力としてのみ扱うべきです。いかなる緩和措置にも、現地の法的レビューと明示的なオペレーター承認が必要です。
EPC投資分析と価格体系
EPC提供では、FOB機器供給、CIF納入物流、ならびに設置、コミッショニング、トレーニング、受入試験を含むターンキー展開という3つの商用範囲を比較すべきです。
SOLARTODOの場合、調達は通常、問い合わせ、オフライン見積、エンジニアリングレビュー、納入範囲確認、適格な大規模プロジェクト向けの資金調達協議という流れに従います。EPCターンキー提供には、サイト調査、土木工事調整、ポール基礎、オフグリッドエネルギーのコミッショニング、ドローンサービス設定、環境センサー校正、ネットワーク統合、オペレータートレーニング、スペアパーツ計画、受入試験を含めるべきです。
3階層の価格設定は、隠れた前提を避けるのに役立ちます。FOB Supplyは、工場機器パッケージと輸出書類を対象とします。CIF Deliveredは、目的港までの運賃と保険を追加します。EPC Turnkeyは、現地設置管理、コミッショニング、トレーニング、現地受入、プロジェクト文書を追加します。購入者はSOLARTODOに対し、機器費、物流、土木工事、設置、ソフトウェア設定、保証範囲、年間保守を分けて提示するよう求めるべきです。
数量価格ガイダンスは、最終構成と国別物流を条件として、50+台で5%割引、100+台で10%、250+台で15%としてモデル化できます。標準的な支払条件は、30% T/Tに加えてB/L引換で70%、または一覧払いの100% L/Cとなる場合があります。$1,000Kを超える大規模プログラムではプロジェクトファイナンスを利用できる可能性があります。商業的な適格性確認については[email protected]までお問い合わせください。
ROIは保証ではなく、パイロットで較正されたモデルとして扱うべきです。防御可能なビジネスケースでは、日常巡回の労務、車両走行距離、点検頻度、対応時間、セキュリティインシデント検証、個別キャビネット、ドック、センサーポール、通信サイトのコストを比較します。大規模キャンパスでは、保守的な計画ケースとして、検証後に日常的な現地訪問を20-40%削減することを目標にできます。
IEA(2024)によると、メインケースでは2030までに5,500 GWの新規再生可能エネルギー容量が見込まれる一方、少なくとも1,650 GWの先進的な再生可能エネルギープロジェクトが系統接続待ちでした。この待機統計は、遠隔地または電力制約のあるサイトにおいて慎重に範囲設定されたオフグリッドインフラの妥当性を強めますが、バッテリー容量設定とデューティサイクル管理の必要性をなくすものではありません。
用途、選定ガイド、運用限界
最初のBVLOS導入に最適なのは、点検価値、セキュリティ上の緊急性、通信カバレッジ、規制承認を一体で検証できる、管理された2-20 kmのコリドーです。
実用的なユースケースには、港湾外周巡回、ソーラーパーク点検、パイプラインまたはフェンスライン監視、キャンパス緊急時確認、工業ヤード在庫確認、道路または橋梁状態レビュー、重要インフラの境界認識が含まれます。強力なプロジェクトには、反復的な経路、測定可能な対応時間上の利点、アクセス、標識、プライバシー通知、保守時間帯を管理できるサイト所有者があります。
選定は運用コンセプトから始めるべきです。購入者は、ハードウェアオプションを選ぶ前に、経路、高度範囲、離陸頻度、滞空時間、緊急着陸オプション、通信カバレッジ、気象閾値、意思決定権限を定義すべきです。FAA Part 107 waiver guidance(2024)によると、標準ルールの範囲外で運用しようとする申請者は、運用リスクと緩和方法を説明しなければなりません。
| Selection Factor | Pilot-Ready Requirement | Procurement Risk If Ignored |
|---|---|---|
| エネルギー予算 | 0.8-1.1 kW DCピークCIGS、5-20 kWh蓄電 | 連続出撃時のバッテリー消耗の過小評価 |
| 規制経路 | BVLOS waiver、COA、または現地の同等制度 | ハードウェア納入後に機体が運航停止 |
| データガバナンス | 生データをローカル処理し、メタデータをエクスポート | プライバシー上の反対と過剰な帯域幅コスト |
| ミッション頻度 | 1日あたりの定義済み出撃回数と交換サイクル | 過剰なドック構成または蓄電容量不足 |
| 通信 | 冗長リンクとイベントログ | コマンド継続性の喪失または不完全な監査証跡 |
| C-UAS範囲 | 人が承認する非致死の実証のみ | 禁止された緩和主張による法的エクスポージャー |
成熟度は3つの階層に分けるべきです。ハードウェア準備完了項目には、ポール構造、エネルギーアーキテクチャ、センサー配置、バッテリーサービスアーキテクチャ、エッジコンピュート統合が含まれます。パイロット段階項目には、ドローン運用管理、環境モニタリング、PTZローカル分析、OTATODOエッジワークフローが含まれます。先行的ポジション項目には、C-UAS緩和、空地ロボット連携、V2X、任意のパートナーレーダー入力、完全な共通運用状況図の自動化が含まれます。
主な制限は、スマートポールネットワークがそれ自体でBVLOS飛行を承認できないことです。インフラ上の摩擦を減らし、証拠取得を改善し、運用を標準化することはできますが、承認は管轄区域ごとに異なります。気象、バッテリー劣化、通信ギャップ、ペイロード制限、プライバシー法、地域社会の受容性を含める必要があります。
FAQ
これら10件のFAQ回答は、BVLOS承認、オフグリッドエネルギー、保守、価格設定、プライバシー、C-UAS境界について、調達チーム向けに40-80語の回答で説明します。
Q: スマートポールドローン運用におけるBVLOSとは何を意味しますか? A: BVLOSとは、承認された安全ケースの下で、ドローンが操縦者の肉眼による直接視認範囲を超えて運用されることを意味します。スマートポールネットワークでは、各ノードが離陸、回収、エネルギーバッファリング、ローカルセンシング、コマンドメタデータを支援できますが、オペレーターには依然として管轄区域固有の承認、文書化されたリスク管理、人によるミッション承認の監督が必要です。
Q: SOLARTODO Sky Hubは、系統電力なしでBVLOSワークフローをどのように支援しますか? A: SOLARTODO Sky Hubは、バッテリー蓄電とCIGS補充発電を用いる完全オフグリッドのスマートポールとして設計されています。CIGS層は現実的な補助発電であり、日射条件の強い地域でおよそ0.8-1.1 kW DCピークおよび6-9 kWh/dayを提供し、5-20 kWh級の蓄電がドローンサービス、センシング、コンピュート、通信負荷をバッファします。
Q: クラウド分析のために生映像をポール外へ送信できますか? A: 想定アーキテクチャでは、生映像とセンサーフィードをローカル処理のためにポール上に保持します。サイト外へ出るべきなのは、匿名化されたイベント記録、運用状態、アラーム、健全性テレメトリ、ミッションログのみです。これにより帯域幅需要が低減され、PDPL/LGPD志向のプライバシー設計を支援しますが、法令遵守は依然として現地導入レビューに依存します。
Q: BVLOSドローン運用には通常どのような承認が必要ですか? A: 承認は、国、空域区分、ドローン重量、運用高度、人口密度、detect-and-avoidコンセプトによって異なります。United Statesでは、目視内飛行制限を超えるFAA Part 107運用には、waiverまたはその他の承認済み権限が必要です。調達チームは、安全ケース作成、試験、トレーニング、規制当局との協議の予算を確保すべきです。
Q: ドローンドックとスマートポールネットワークの違いは何ですか? A: スタンドアロンのドックは通常1つの離陸サイトに対応しますが、スマートポールネットワークは複数ノードにわたって電力、センシング、コンピュート、ミッション状態を分散します。BVLOSコリドーでは、そのネットワークによりカバレッジ、冗長性、保守アクセスを改善できます。SOLARTODOはSky Hubを、照明製品ではなく純粋なスマートポールとして位置付けています。
Q: 購入者はBVLOSスマートポールネットワークのROIをどのように見積もるべきですか? A: ROIでは、回避された巡回時間、トラック出動の削減、アラーム検証の迅速化、資産点検頻度の向上、スタンドアロンのキャビネットまたは基礎工事の削減を比較すべきです。初期パイロットでは、検証後に日常点検訪問が20-40%削減されるといった保守的な前提を用い、その後、実測されたミッション成功率、バッテリースループット、保守コスト、承認に伴う負担に照らして調整します。
Q: このシステムにはcounter-UAS緩和機能が含まれますか? A: このコンセプトでは、C-UAS調整は非致死で人が承認する検知、追跡、対応調整に限定されます。実証ワークフローには、友軍ドローンによる模擬空中ネット捕獲または近接接近による抑止が含まれる場合があります。ポールはレーダーハードウェアとして説明されておらず、緩和措置は、禁止された力の行使、信号拒否手法、自動化された敵対的対応を避けなければなりません。
Q: オフグリッドBVLOSポールにはどのような保守が必要ですか? A: 保守では、バッテリー健全性、CIGS表面状態、コネクター、耐候シール、ドローンバッテリーマガジン動作、充電インターフェース、PTZ校正、環境センサー、エッジコンピュートログを対象にすべきです。一般的な計画には、毎週のリモート健全性確認、3-6か月ごとの現地点検、荒天後または異常なドッキング不具合後の事後点検が含まれます。
Q: 大規模プロジェクトのEPC価格はどのように構成されますか? A: SOLARTODO B2Bプロジェクトでは、FOB Supply、CIF Delivered、またはEPC Turnkey見積として依頼すべきです。EPCは、機器供給にサイト調査、基礎、設置、コミッショニング、トレーニング、プロジェクト管理を追加します。数量ガイダンスは50、100、250台で適用でき、支払条件は30% T/Tに加えてB/L引換で70%、または一覧払いの100% L/Cを用いる場合があります。
Q: 購入者はいつ本格展開ではなくパイロット導入を選ぶべきですか? A: BVLOS承認、現地通信カバレッジ、C-UASルール、データガバナンス要件、またはドローンのデューティサイクルが未検証の場合は、パイロットを選択します。3-6か月のパイロットにより、$1,000Kを超える複数サイト展開または資金調達にコミットする前に、エネルギー発電量、ミッション完了率、アラームワークフロー、プライバシー管理、保守負担を検証できます。
参考文献
これら8件の参考文献は、BVLOS承認、再生可能電力の前提、PVモデリング、リモート識別、電気安全上の選択を、2024-2026計画に向けて認知された機関に基づけています。
- FAA UAS BEYOND Program (2025): Phase 1の成果として総飛行70,563件およびBVLOS飛行48,383件を報告し、Phase 2は2029まで実施。https://www.faa.gov/uas/programs_partnerships/beyond
- FAA Part 107 Waivers (2024): 目視内飛行制約を含むPart 107制限外の運用に関するwaiver要件を説明。https://www.faa.gov/uas/commercial_operators/part_107_waivers
- FAA Remote Identification of Drones (2025): Remote IDを、飛行中ドローンの識別および位置情報のブロードキャストとして定義。https://www.faa.gov/uas/getting_started/remote_id
- IEA Renewables 2024 (2024): 2030までに5,500 GWの新規再生可能エネルギー容量を予測し、太陽光PVを再生可能エネルギー成長の80%として特定。https://www.iea.org/reports/renewables-2024
- IRENA Renewable Capacity Statistics 2026 (2026): 2025の再生可能エネルギー追加692 GW、容量拡大に占める85.6%のシェア、太陽光追加511 GWを報告。https://www.irena.org/News/pressreleases/2026/Apr/Near-700-GW-Surge-in-2025-Proves-Renewable-Energy-Resilience
- NREL PVWatts V8 API (2026): PVWatts V8の太陽光資源データセット、0.05-500,000 kWの容量入力、時間別出力、太陽光発電性能モデリングを文書化。https://developer.nrel.gov/docs/solar/pvwatts/v8/
- IEEE 2030.5-2018 (2018): 分散型エネルギー資源およびエッジエネルギー統合に関連するユーティリティ通信のためのSmart Energy Profileアプリケーションプロトコル。https://standards.ieee.org/ieee/2030.5/5897/
- ASTM F3411-22a (2022): 相互運用可能なドローン識別ワークフローに関連する、無人航空機システムのRemote IDおよび追跡に関する標準仕様。https://www.astm.org/f3411-22a.html
結論
BVLOSスマートポールネットワークは、5-20 kWhの蓄電、6-9 kWh/dayの補充発電、承認主導のミッション制御を組み合わせた、パイロット検証済みインフラとして最も強みを発揮します。
要点は次のとおりです。SOLARTODO Sky Hubは、照明資産や無制限の太陽光プラットフォームではなく、管理されたBVLOSコリドー向けの完全オフグリッド純粋スマートポールとして指定すべきです。50ノードを超えるプロジェクトでは、購入者は3階層見積を依頼し、3-6か月のパイロットを検証し、エネルギー発電量、ミッションログ、保守コスト、承認ワークフローが実証された後にのみ拡張すべきです。
SOLARTODOについて
SOLARTODOは、世界中のB2B顧客向けに、太陽光発電システム、エネルギー貯蔵製品、スマート街路照明およびソーラー街路照明、インテリジェントセキュリティ&IoT連携システム、送電鉄塔、通信タワー、スマート農業ソリューションを専門とするグローバル統合ソリューションプロバイダーです。
著者について

Cinn Song
Founder & Chief Solutions Architect
Cinn Song founded SOLARTODO LIMITED and leads its smart-city infrastructure engineering — from solar, storage and integrated smart poles to the company's push into physical-AI city edge nodes: pole-mounted edge computing, vertical LLMs for smart cities, drone-based O&M with autonomous battery swapping, robotic maintenance, and high-speed counter-UAS interception. Since 2010, he has directed turnkey EPC + BOT delivery across 50+ countries, including telecom monopole supply for national grid operators, off-grid solar street-lighting for African municipalities, and integrated smart-pole programs for Gulf smart cities.
この記事を引用
Cinn Song. (2026). スマート…によるBVLOSドローン運用. SOLARTODO. Retrieved from https://solartodo.com/ja/knowledge/beyond-visual-line-of-sight-drone-operations-from-smart-pole-networks
@article{solartodo_beyond_visual_line_of_sight_drone_operations_from_smart_pole_networks,
title = {スマート…によるBVLOSドローン運用},
author = {Cinn Song},
journal = {SOLARTODO Knowledge Base},
year = {2026},
url = {https://solartodo.com/ja/knowledge/beyond-visual-line-of-sight-drone-operations-from-smart-pole-networks},
note = {Accessed: 2026-06-21}
}Published: June 21, 2026 | Available at: https://solartodo.com/ja/knowledge/beyond-visual-line-of-sight-drone-operations-from-smart-pole-networks