
City AI Pole、またはSOLARTODO SentinelのPhysical-AIエッジノードとは、エッジ推論、センシング、レジリエントな電源、ドローンドック、ドック格納型巡回ロボットを組み合わせた統合型スマートポールである。提案中のこのアテネ警察パイロットでは、ネットワークサービスが不安定な災害後の夜間巡回をノードが支援し、オンデバイスAIを用いてイベントをトリアージし、誤警報を低減する。
1. パイロットの背景:停止条件下における山岳都市の警備
本パイロットレポートは、最終的なエンジニアリング確認を前提として、ギリシャ・アテネにSOLARTODO Sentinel Physical-AIエッジノードポールを配置するための、提案段階かつ例示的な構成を説明するものである。本プロジェクトは製品デモではなく、災害後にネットワークアクセスが不安定になり、街路レベルの視認性が低下し、巡回チームが困難な地形をカバーしなければならない状況で、対象となる公共安全監視を継続するという警察の夜間巡回タスクを中心に設計されている。
アテネは盆地内に位置する高密度な首都であり、ヒメットス、ペンテリ、パルニサ、リカヴィトスなどの周辺の山地や丘陵、ならびに都市部の住宅地区、郊外縁辺部、公園、インフラ回廊、急勾配の住宅街を結ぶ上り坂のルートによって形づくられている。警察計画において、この山岳都市としての特性は重要である。激しい気象、火災、洪水、斜面浸食、道路閉塞、またはユーティリティ障害の後には、小規模なインシデントであっても、カメラ、住民、アクセスポイント、現場警察官から多数のアラームが発生する可能性がある。夜間には、誤った出動のコストが上昇する。隊員が狭い通り、照明の乏しい斜面、損傷した道路区間、または通信が断続的な場所へ派遣される可能性があるためである。
この提案パイロットの季節的トリガーは、多国籍の緊急対応プログラムが計画規律として用いる台風シーズンのレジリエンス期間である。本稿では、アテネを熱帯台風都市として提示しているわけではない。関連性は運用面にある。警察および緊急対応の関係者は、接続性の低下、風、雨、がれき、電力不安定性によって実際のインシデントとノイズの多いアラートの双方が発生し得る暴風雨シーズン態勢において、都市エッジノードが有用性を維持できるかを評価したいと考えている。
提案される配置モードは、災害後の補完配置である。Sentinelポールは、既存インフラを都市全域で広範に置き換えるものとして位置づけられていない。障害発生後に固定CCTV、無線バックホール、街路照明、または通常巡回のカバレッジが不十分となり得る地点を補完するノードとして提案されている。アテネでは、候補地として、山側に向かう道路アプローチ、急勾配のアクセス道路近くの公共広場、公園縁辺部、交通結節点、自治体サービスヤード、一時指揮エリアの外周などが考えられる。具体的な設置場所、数量、土木工事、許認可、カバレッジ前提については、現地調査とエンジニアリング確認が必要である。
本レポートの主要ステークホルダーは、警察の購入者である。すなわち、運用指揮官、公共安全技術チーム、調達担当者、緊急連絡担当スタッフである。彼らの中核的な問いは、ポールが高度なモジュールを備えているかどうかではない。統合ノードが、ネットワーク停止中に夜間巡回デスクで実際の現場懸念と誤警報を識別する助けになるかどうかである。
2. 提案されるSentinelの役割:エッジ判断を伴うロボット主導の夜間巡回
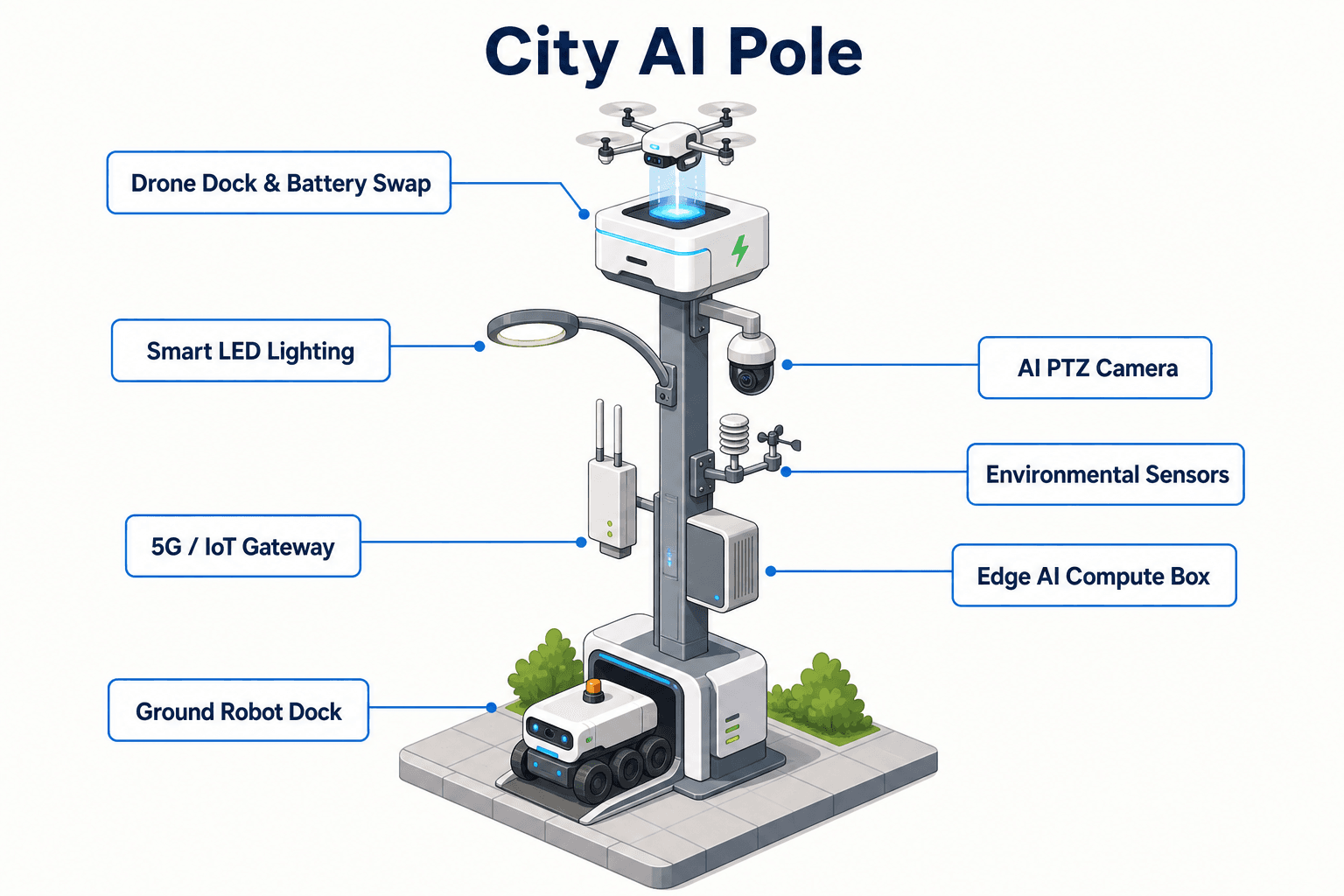
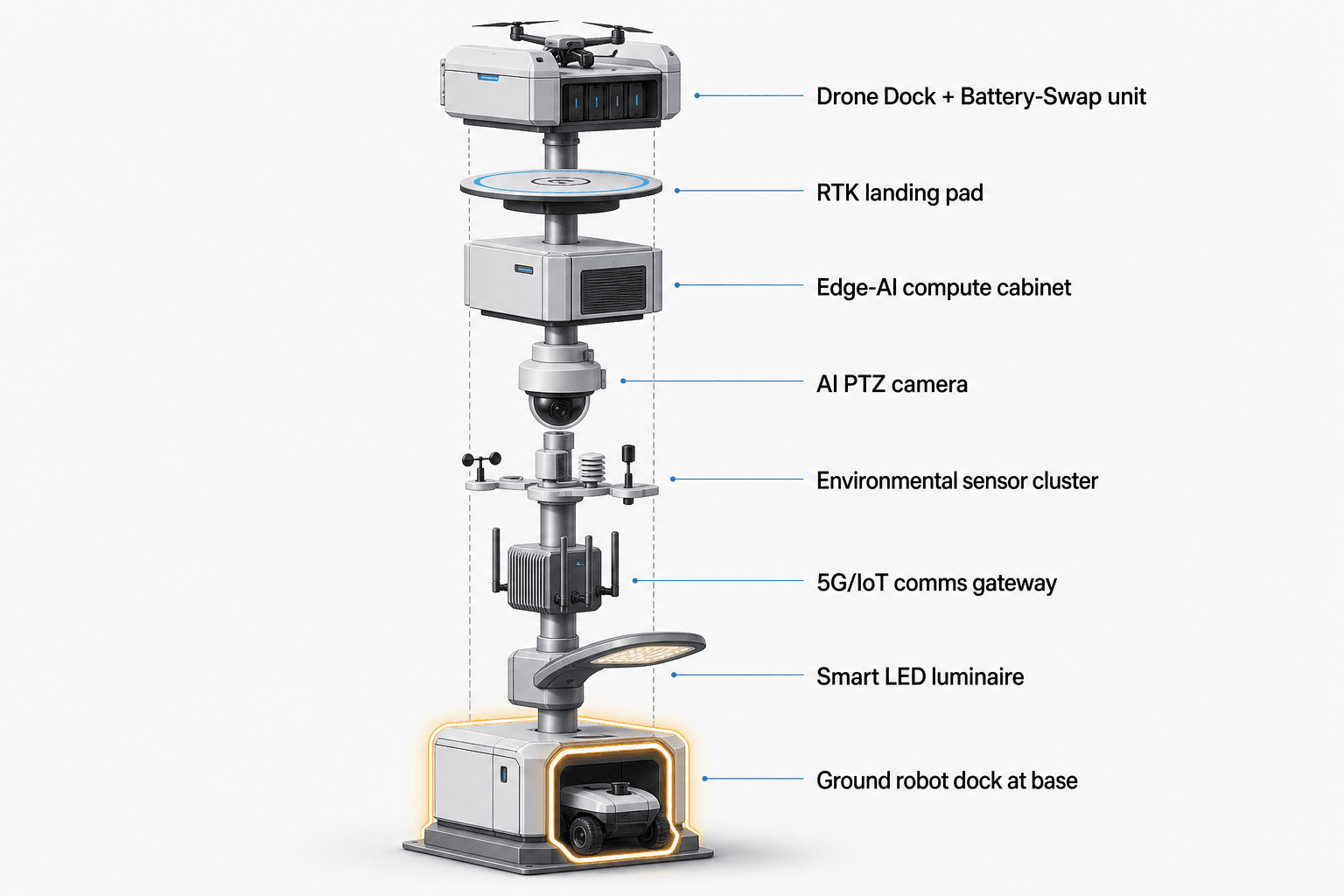
アテネにおけるSOLARTODO Sentinelの提案タスクは、定義された災害後補完ゾーン周辺でのロボット主導の夜間巡回である。Sentinelは、ブラッシュドメタルの本体、ミッドナイトブルーの太陽光発電中間部、シアンのLEDアクセントリングを備えた、細身の円筒形または八角形のスマートポールである。このポールは、上部ドローンユニット、地上巡回ロボットドック、エッジコンピュート、センシング、レジリエントな電源オプションを単一の都市アセットに統合する。単体のドローン販売や単体のロボット販売として提案されるものではなく、価値は統合型都市ポールから生まれる。
夜間巡回シナリオでは、地上ユニットが運用上の焦点となる。汎用の四足歩行または車輪型巡回ロボットは、自動充電のためにポール基部にドック格納され、エッジAIシステムが現地確認に値する状態を検知した場合に短い点検ルートを移動する。そのルートは、地形検証を前提として、広場の外周、サービス道路のゲート、閉塞された通りへのアプローチ、丘陵地の階段、またはインフラ前面部を対象に構成できる。ロボットの目的は警察の判断を置き換えることではない。警察官がそのエリアへ派遣される前、またはアラートが管制室へエスカレーションされる前に、より近い距離から二次確認を提供することである。
ポールのセンシング層はこのワークフローを支援する。PTZカメラが巡回ゾーンを監視する。気象および環境センサーは、動き、がれき、照明の変化、雨がシーンに影響している可能性を説明するうえで役立つ現地条件を提供する。見通し、暗闇、煙、または反射面によりカメラのみの解釈が複雑になる場所では、オプションの4DレーダーまたはLiDARを検討できる。すべてのオプションモジュールは、現場条件、プライバシー要件、警察の運用方針、エンジニアリング確認に基づいて選定される。
ポール上部には、白いSOLARTODOドローンドックまたはクラムシェル屋根付きネストがあり、汎用クアッドコプターを収容する。ドローンは、高精度RTK着陸パッドと、ダウンタイムを最小化するための迅速な自動バッテリー交換用ホットスワップマガジンを備える。このアテネパイロットの枠組みでは、ドローンは補助的な高所点検ツールである。警察デスクが、閉塞道路、損傷した斜面、アクセス困難な中庭、または外周縁辺部を上方から確認する必要がある場合に発進できる。本稿では、正確なバッテリー交換時間、飛行時間、航続距離、応答時間は想定していない。
エッジコンピュートキャビネットは、停止シナリオの中核である。換気機能を備えたポール上のキャビネット内に、組み込み型エッジAIアクセラレータを収容する。推論はデバイス上で実行され、すべてのフレームまたはイベントがクラウドへの往復を完了することを必要とせず、低遅延の分類を支援する。これはネットワークサービスが不安定な場合に重要である。接続性が低下しても、ノードはイベントをローカルに分類し、信頼度をスコアリングし、ポリシーに従ってロボットまたはドローンのワークフローをトリガーし、許可される範囲で後の同期に向けて記録を保持できる。
3. ネットワーク停止レジリエンスに向けた電源中心の構成
本パイロットのモジュール上の焦点は電源である。ネットワーク停止対応は、広域環境に負荷がかかった際にノードが有用性を維持できる場合にのみ信頼できるためである。災害後のアテネ条件において、安定したバックホールと途切れない商用電源に完全依存するスマートポールは、別の死角になり得る。したがって、提案されるSentinel構成では、センシング、推論、ロボットドッキング、イベント記録の基盤として電源を扱う。
SOLARTODO Sentinelは、系統電源または風力・太陽光ハイブリッド電源に構成できる。本パイロットレポートでは、計画コンセプトとして、利用可能な場所では系統接続を推奨し、山からの風にさらされる場所、またはレジリエンス要件により正当化される場所では、風力・太陽光ハイブリッド構成を評価することを推奨する。ミッドナイトブルーの太陽光発電中間部はポールの統合電源戦略に寄与し、系統入力、太陽光寄与、風力要素、蓄電、負荷管理の最終的なバランスは各現場ごとに設計される。本レポートでは自律稼働時間を主張しない。
電源管理はロボットのワークフローに直接影響する。巡回ロボットはポール基部で自動充電によりドック格納されるため、警察チームは各タスク後に手動でバッテリーを扱う必要がある単独の現場デバイスではなく、準備済みステーションとしてノードを扱うことができる。夜間巡回の文脈では、出動デスクが継続的な徘徊ではなく、確認イベントのためにロボットを温存できることを意味する。これは誤警報率評価において重要である。ロボットは、エッジスコアと運用ルールが二次確認を正当化する場合に出動すべきであり、すべてのセンサー変動に対して出動すべきではない。
電源はドローンサブシステムにも影響する。上部ドローンドックのクラムシェル屋根はドック格納中のクアッドコプターを保護し、ホットスワップバッテリーマガジンは、警察または保守スタッフが各サイクルでポールに登ったり航空機バッテリーを扱ったりすることなく、ミッション間のダウンタイムを減らすことを意図している。本パイロットでは、ドローンは統合型Sentinelポール内の制御されたモジュールであり続け、運用許可、気象しきい値、現場固有の飛行ルールは購入者および関係当局が確認する必要がある。
ネットワーク停止中、エッジAIキャビネットには、ローカル推論とイベントログ記録を継続するために十分な電源安定性が必要である。PTZカメラ、気象センサー、オプションのレーダーまたはLiDAR、LEDステータスアクセント、ロボットドック、ドローンドック、通信機器はすべて、同一の運用電源計画から給電される。したがって、実用的なアテネパイロットでは、たとえば中核となるカメラ推論とロボット充電を維持しつつ、特定の電源条件下で不要な照明を制限する、またはドローン待機を一時停止するなど、負荷制限ポリシーをテストすることになる。これらは構成上の判断であり、固定的な製品主張ではない。
期待される運用上の利点は、トリアージの継続性である。暴風雨、火災、またはインフラ障害の後に警察官が多数のアラートを受け取る場合、Sentinelポールは視覚的および環境的文脈をローカルで評価し、構成されている場合には地上確認のためにロボットを呼び出し、ネットワーク接続が断続的であってもイベント証拠を保存できる。電源設計こそが、そのループを有用であるのに十分な時間利用可能に保つ。
4. KPI手法:主張された結果ではなく、誤警報率評価
このアテネパイロットのKPIの枠組みは誤警報率である。本レポートは、達成済みの低減、検知率、遅延数値、カバレッジ面積、または導入結果を主張しない。代わりに、提案されるSentinel構成が、ネットワーク停止条件下で夜間巡回の意思決定品質を改善するかどうかを警察購入者が評価する方法を定義する。
ベースラインとなる課題は、災害後の警備ではよく知られている。夜間には、PTZカメラが影の動き、風で飛ばされたがれき、濡れた石の反射、動物、不正侵入、損傷したバリア、または実際の人間活動を捉える場合がある。住民は、損傷した通りや閉鎖された公共エリア付近の不審な動きを通報する可能性がある。管制デスクは、警察官を派遣するか、近隣部隊に確認を依頼するか、別のカメラを確認するか、そのイベントを無視するかを判断しなければならない。ネットワークサービスが劣化している場合、クラウド分析、遠隔映像レビュー、中央調整は遅くなるか利用できない可能性がある。これにより、誤警報が警察の注意を消費し、その一方で実際のイベントが待たされるリスクが高まる。
提案されるSentinelワークフローでは、誤警報率評価は、生のアラートを、エッジでスコアリングされたアラート、ロボットで確認されたアラート、警察官が検証した結果と比較することになる。警察購入者は、パイロット開始前に何をアクショナブルなアラートとみなすかを定義する。たとえば、アクショナブルなイベントには、制限された災害後ゾーンへの無許可立ち入り、重要な入口付近での反復的な動き、自治体ステージングエリアからの物品持ち去り、または巡回ルート上で観察された安全上の危険が含まれる場合がある。Sentinelポールの役割は、エスカレーション前にローカルな文脈を追加することである。
実用的な評価では、エッジAIを最終権限として扱うことを避けるべきである。組み込み型エッジAIアクセラレータは、ポール上でイベントを分類しスコアリングする。スコアが設定済みしきい値を超えた場合、地上ロボットがより近距離の点検ルートを実行できる。より高い視点が正当化され、許可されている場合、クアッドコプターはSOLARTODOドックから発進し、上空からの視界を提供できる。その後、管制デスクは構造化された記録を受け取る。時刻、センサートリガー、AIカテゴリ、信頼度帯またはポリシースコア、ロボット確認ステータス、使用された場合のドローン確認ステータス、オペレーターの処置である。
アテネにとって重要なKPIは、単にアラート数が少なくなることだけではない。ストレスの高い夜勤中に、誤ったエスカレーションを減らすことである。あまりにも多くのイベントを抑制するシステムは受け入れられない。したがって、パイロットでは、誤警報率を、見逃しイベントのレビュー、警察官によるオーバーライド頻度、ロボットミッションの有用性、電源状態の安定性、ネットワーク停止時間、記録の完全性とあわせて評価すべきである。市および警察購入者は、調達中に目標しきい値を設定し、現地調査と法務レビュー後にそれらを改訂することになる。
提案される評価期間には、計画的な停止シミュレーション、夜間運用、利用可能な場合の気象変化、制御されたテストイベントを含めるべきである。また、公共空間における警察のモバイルセンシング利用は、ポリシー、監査可能性、明確な運用許可によって管理されなければならないため、プライバシーおよびデータ保持ルールも含めるべきである。本レポートは、運用結果ではなく、目標となる計画入力のみを提示する。
5. パイロット運用モデルと購入者の意思決定プロセス
提案されるアテネパイロットは、定義された受け入れ判断項目を持つ運用パイロットレポートとして管理される。第一に、ネットワークが劣化した際に、Sentinelポールは有用な検知・判断・実行・記録のループを維持できるか。第二に、地上ロボットは、災害後の夜間巡回ゾーンへ警察官を派遣する前に、警察の確信度を高められるか。第三に、電源構成は、地域の優先事項に従って最も重要なモジュールを利用可能な状態に保てるか。第四に、そのワークフローは、実際のリスクを隠すことなく、警察が後に誤りと分類するアラートの割合を低減するか。
パイロットは、設置場所の選定とエンジニアリング調査から開始すべきである。警察関係者は、災害対応計画、夜間巡回の負荷、既知の通信脆弱性に基づいて、候補となる補完配置地点を推薦する。エンジニアリングチームは、設置条件、電源オプション、風への曝露、太陽光アクセス、ロボットルートの適合性、ドローン運用上の制約、センサーの見通し、キャビネット換気、保守アクセス、コンプライアンス要件を評価する。最終構成は、引き続きエンジニアリング確認を前提とする。
次に、購入者は運用ルールを定義する。これらのルールでは、PTZカメラがいつスキャンできるか、ロボットがいつドックを離れられるか、どのルートを走行できるか、ドローンがいつ発進できるか、電源が設定状態を下回った場合に何が起こるか、どの証拠がローカルに保存されるかを明記すべきである。また、警察スタッフ向けのエスカレーションしきい値も定義すべきである。目的は、規律ある自動化である。ノードは警察がイベントをフィルタリングし確認することを支援するが、エスカレーションは警察ポリシーが決定する。
トレーニングは実践的かつシナリオベースであるべきである。オペレーターは、エッジAIキャビネットがローカルで何を行うか、何を判断しないか、ロボット確認がどのように表示されるか、ドローンモジュールがどのように制御されるか、接続性が回復した後に記録がどのようにレビューされるかを理解する必要がある。保守チームには、ポール本体、太陽光発電中間部、LEDリング、気象センサー、PTZカメラ、ロボットドック、ドローンドック、クラムシェル屋根、ホットスワップマガジン、換気式コンピュートキャビネットを点検するための手順が必要である。
購入判断は、広範な主張ではなくパイロット証拠に基づくべきである。警察購入者は、提案されるSentinel構成が、アテネ特有の地形と停止シナリオにおいて、さらなるエンジニアリング設計を正当化するだけの価値を提供するかを問うべきである。パイロットデータが、アラートが依然としてノイズ過多である、ロボットルートが実用的でない、または電源優先順位が整合していないことを示す場合、より広範な導入を検討する前に構成を調整すべきである。パイロットが、誤警報率の低下と夜間巡回トリアージの改善に向けた信頼できる道筋を示す場合、次のステップは、許可、土木工事、統合、運用ポリシーを詳細に定義した、正式な現場別設計パッケージとなる。
システム構成
| 項目 | 構成 |
|---|---|
| ポールのフォームファクター | ブラッシュドメタルの本体、ミッドナイトブルーの太陽光発電中間部、シアンのLEDアクセントリングを備えた、細身の円筒形または八角形の都市ポール。 |
| エッジAIコンピュート | 組み込み型エッジAIアクセラレータを備えた換気式ポール上キャビネットで、必須のクラウド往復なしにオンデバイス推論と低遅延運用を実現。 |
| 地上巡回ユニット | 構成済みの夜間巡回確認ルート向けに、自動充電機能付きでポール基部にドック格納される汎用の四足歩行または車輪型巡回ロボット。 |
| ドローンユニット | 汎用クアッドコプター、高精度RTK着陸パッド、自動バッテリーホットスワップマガジンを備えた白いSOLARTODOクラムシェル型ドローンドック。 |
| センシングパッケージ | PTZカメラ、気象および環境センサー、ならびに現場条件とエンジニアリング確認を前提としたオプションの4DレーダーまたはLiDAR。 |
| 電源構成 | 系統接続または風力・太陽光ハイブリッド構成。最終的な負荷管理と蓄電の前提は現場エンジニアリングにより決定。 |
| 配置モード | 許認可および運用ポリシーを前提とした、アテネの選定された停止リスクの高い場所における警察夜間巡回トリアージ向け災害後補完ノード。 |
仕組み
- ポール上のPTZカメラと環境センサーが、災害後補完ゾーン内の夜間異常を検知する。
- 組み込み型エッジAIアクセラレータがイベントをローカルで分類し、警察が定義したエスカレーションポリシーを適用する。
- 構成済みしきい値を満たした場合、ドック格納された巡回ロボットが基部を離れ、短い確認ルートを実行する。
- 高所からの視界が許可されている場合、汎用クアッドコプターが補助点検のためにSOLARTODOクラムシェルドックから発進する。
- ノードは、センサートリガー、AIスコア、ロボット確認、オプションのドローン視界、電源状態、オペレーターの処置を記録する。
- 接続性が利用可能になると、記録は警察レビューと誤警報率分析のために同期される。
計画前提(参考値)
購入者が再計算できる例示的な計画入力値であり、達成済みの結果ではなく目標指標です。最終的なエンジニアリング確認が前提です。
| 指標 | 計画前提 | 参考値 |
|---|---|---|
| 点検労務 | 選定されたパイロットゾーンにおいて、ロボット確認が手動の夜間確認巡回の一部を代替する。 | 計画比較用に週あたり約5から10回の巡回確認を自動化。 |
| 誤警報レビュー | 警察へのエスカレーション前に、生のセンサーアラートを、エッジでスコアリングされロボットで確認されたアラートと比較する。 | 目標低減幅は購入者が設定。例:評価用に約10%刻み。 |
| 停止時の継続性 | 計画的なネットワーク劣化テスト中、すべてのイベントについてクラウド往復に依存せず、ローカル推論が継続する。 | パイロット期間中、月あたり約1回の停止訓練。 |
| オペレーター業務負荷 | 管制デスクのスタッフは、フィルタリングされていない映像のみのアラートではなく、構造化されたイベント記録をレビューする。 | パイロットスコアリング用に約3つのアラートカテゴリを優先。 |
| 電源レジリエンス | 系統または風力・太陽光ハイブリッド構成を、選定されたセンサー、ロボット、ドック、エッジコンピュートの負荷に対して評価する。 | エンジニアリング計画中に約2つの電源プロファイルを比較。 |
導入機器
- 太陽光発電中間部とLEDアクセントリングを備えたSOLARTODO Sentinelスマートポール本体
- 組み込み型エッジAIアクセラレータを備えた換気式ポール上エッジAI推論キャビネット
- PTZカメラアセンブリ
- 気象および環境センサーパッケージ
- オプションの4DレーダーまたはLiDARモジュール
- クラムシェル屋根、RTK着陸パッド、汎用クアッドコプター、バッテリーホットスワップマガジンを備えた白いSOLARTODOドローンドック
- 自動充電ベースを備えたドック格納型の汎用四足歩行または車輪型巡回ロボット
- 現場エンジニアリングを前提とした系統または風力・太陽光ハイブリッド電源インターフェース
よくある質問
これは測定済み結果を伴う実際に完了したアテネ導入ですか?
いいえ。これは、最終的なエンジニアリング確認を前提とした、アテネ警察計画向けの提案段階かつ例示的なB2Bパイロット構成です。設置数量、達成済みの誤警報低減、カバレッジ面積、遅延性能、顧客承認、認証、または運用結果を主張するものではありません。記載されたKPIは、購入者が定義、テスト、再計算できる目標評価指標です。
なぜパイロットはドローンではなく巡回ロボットに重点を置いているのですか?
運用シナリオは災害後の警察夜間巡回であり、地上レベルからの二次確認が、アラートが警察官の出動に値するかを判断する助けになります。ロボットは自動充電機能付きでポール基部にドック格納され、短い確認ルート向けに構成できます。ドローンは統合型Sentinelノードの一部であり続けますが、補助的な高所点検モジュールとして扱われます。
Sentinelノードはネットワーク停止中にどのように役立ちますか?
ポールには、換気式キャビネット内のポール上組み込み型エッジAIアクセラレータが含まれるため、すべてのイベントがクラウド往復を完了することを必要とせずに、推論をローカルで実行できます。接続性が劣化している間も、ローカルポリシーと電源可用性に応じて、ノードはイベントのスコアリング、構成済みのロボットまたはドローンアクションのトリガー、後のレビュー向けの構造化証拠の記録を継続できます。
このアテネパイロットで電源が中心的な設計課題となる理由は何ですか?
災害後の夜間巡回は、都市条件が不安定なときにセンシング、ローカル推論、ロボットドッキング、イベント記録が利用可能な状態で維持されて初めて機能します。提案されるSentinel構成は、系統電源または風力・太陽光ハイブリッド方式を使用でき、太陽光発電中間部と最終電源設計は、地域の曝露条件、負荷優先度、レジリエンス要件を中心に設計されます。
警察は結果を誇張せずに誤警報率をどのように評価すべきですか?
購入者はパイロット開始前にアクショナブルなアラートを定義し、その後、生のアラート、エッジでスコアリングされたアラート、ロボットで確認されたアラート、警察官が検証した結果を比較すべきです。評価では、見逃しイベントのレビュー、オペレーターのオーバーライド、電源状態、記録の完全性も追跡すべきです。改善は、制御されたテストと運用検証の後にのみ報告されるべきです。
アテネでの導入にレーダーまたはLiDARを含めることはできますか?
カメラのみのセンシングが暗闇、煙、反射、気象、または複雑な地形によって制限される可能性がある場合、オプションの4DレーダーまたはLiDARを検討できます。採用は、現地調査、プライバシーレビュー、統合設計、エンジニアリング確認に従うべきです。提案されるベースラインには、すでにPTZカメラと気象または環境センシングが含まれています。
SOLARTODO Sentinelはここで独立したドローンまたはロボットシステムとして販売されていますか?
いいえ。本記事ではSOLARTODO Sentinelを、ポール本体、エッジコンピュート、センシング、電源、ドローンドック、ドック格納型巡回ロボットが1つのPhysical-AIエッジノードとして機能する統合型都市ポールとして扱っています。ドローンとロボットは都市ポール構成内の汎用モジュールであり、個別に販促されるブランド製品ではありません。
さらに詳しく
街路・キャンパス・公共空間で同様のフィジカルAI導入をご検討ですか? エンジニアリング相談を依頼する