
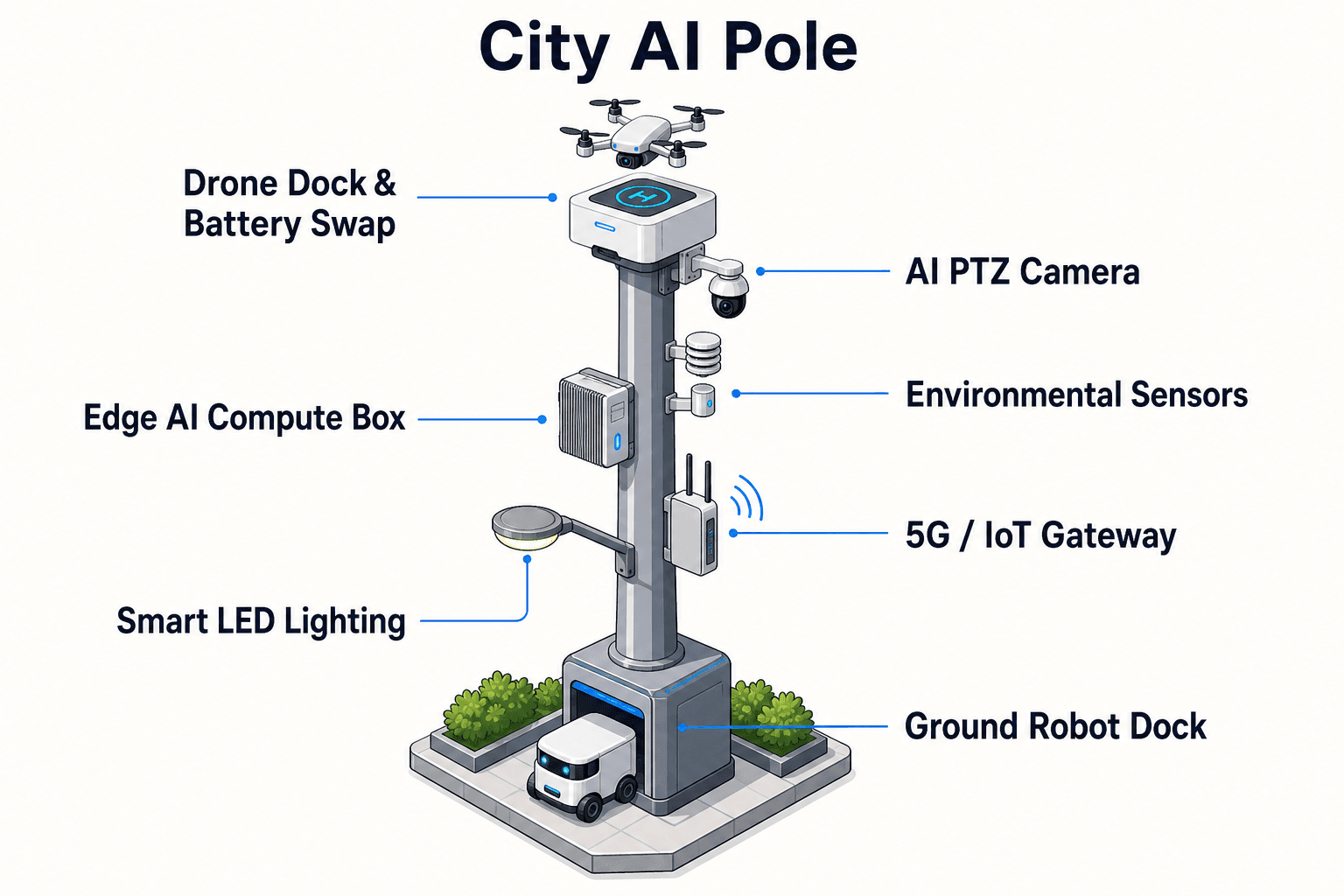
City AI Poleは、照明機能を持たないフィジカルAI型の都市エッジノードであり、オフグリッド蓄電、エッジコンピュート、センシング、ドローン運用、地上ロボット支援を1つのポール型ステーションに統合します。カイロでは、SOLARTODO Sentinel Sky Hubを臨時の夜間経済イベント巡回向けに提案し、生映像をポール外へ送信することなく、警察がローカルな証拠メタデータを収集し、承認済み対応を調整できるよう支援します。
1. インシデント背景: カイロの夜間経済巡回
カイロの文化観光型夜間経済は、厳しい警備パターンを生み出します。文化遺産地区付近に到着する密集した歩行者の流れ、バスや自家用車、狭い進入路を移動する売店業者や来訪者、そして一晩のうちに変わり得る臨時イベント境界が存在します。警察の任務は、固定されたラインをただ監視することではありません。何が起きたかを理解し、有用な証拠を保持し、異常と承認済み現場対応の間の時間を短縮することです。この提案型インシデントレビューケーススタディでは、SOLARTODO Sentinel Sky Hubポールを、文化遺産市場への進入路、博物館隣接の集合エリア、ナイル川沿いのイベントアクセス地点、管理された歩行者ルートなど、文化観光回廊周辺の臨時イベント管理ポイントに配置します。この構成は例示であり、各会場、ルート形状、無線環境、許可モデルについて最終的なエンジニアリング確認が必要です。運用上の課題は、夜間巡回中の証拠収集です。徒歩巡回は、混乱がすでに移動した後に到着する可能性があり、従来型カメラは、指揮チームが時間内に確認しきれない量の生データを記録する可能性があります。Sky Hubは、カメラと環境フィードをポール上でローカル処理し、警察の共通作戦状況図コマンドビュー向けに、匿名化されたイベントおよびステータスメタデータを生成することでワークフローを変えます。このポールは照明資産ではなく、純粋なスマートポールです。センシング、コンピュート、バッテリー蓄電、太陽光補充、自律ドローン支援、地上ロボット支援を搭載し、照明システムはありません。カイロの臨時イベントモデルでは、この違いが重要です。ノードを既存のユーティリティ設置地点に縛られず、運用カバレッジに基づいて配置できるためです。
2. レビュー上の問い: 証拠収集を遅らせた要因は何か
レビューシナリオは、文化観光ルート付近の混雑した夜間イベントから始まります。小規模な境界突破、ゲート付近の群衆圧縮、制限されたサービスレーン周辺での動きが、警察の評価を必要とする場合があります。インシデント上の問いは実務的です。警察イベントチームは、適切な対応を選択できるだけの有用な状況証拠を、どのように十分迅速に取得できるか。提案導入では、Sky Hubポールが、匿名化された車両台数、群衆密度、侵入、境界認識についてローカル認識を行います。生映像と生センサーデータはポール上に留まります。コマンドビューは、イベントメタデータ、デバイス状態、ミッションログ、オペレーター承認済みの対応オプションを受け取ります。これは、継続的な生データアップロードではなく、ローカル処理とデータ最小化を中心に設計されているため、PDPL-LGPDを意識した取り扱いを支援します。KPIは応答時間であり、実績値の主張ではなく、目標評価指標として位置づけられます。購入者は、ポールのイベントフラグから、オペレーター評価、承認済みドローン出動または地上ロボットタスク設定、証拠パッケージレビューまでの時間を測定できます。このケースは、達成済みの検知率、実運用数量、カバレッジエリアを主張しません。代わりに、運用テストを定義します。臨時の夜間経済イベント中に、このポールは警察が回避可能な待機を減らし、不要な手作業の探索ループを取り除き、証拠の流れをより明確に保つことに役立つか。インシデントレビュー構造は説明責任も支援します。各アクションには、ミッションログ、バッテリー状態、タスクキュー参照、人間による承認マーカーがあるため、イベント後に対応記録をレビューできます。
3. イベント周辺の提案ノード構成
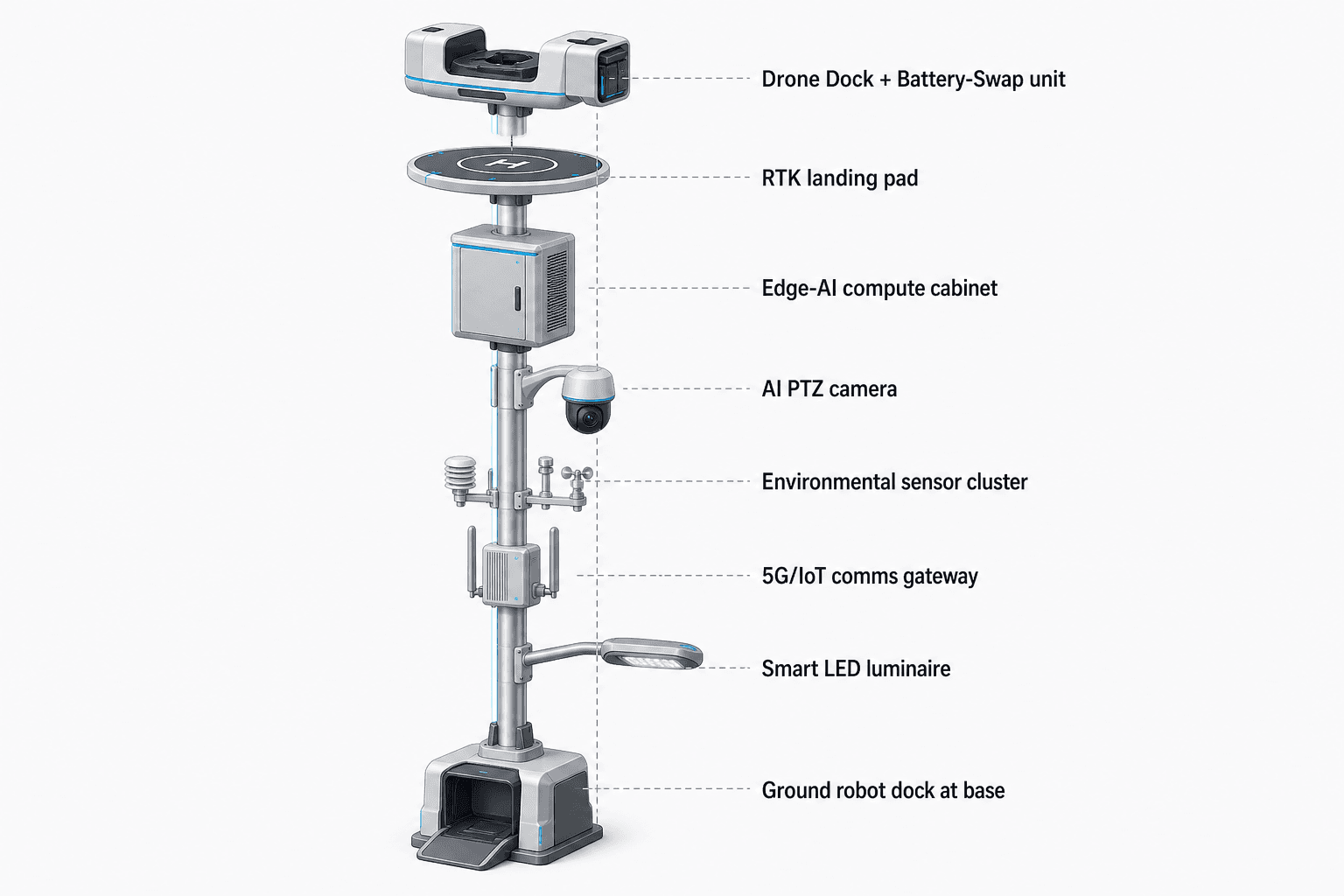
カイロの臨時イベントレイアウトでは、Sky Hubを、管理ポイント、歩行者の集中動線、サービスアクセス端部の付近に配置するオフグリッドのマイクロステーションとして使用します。各ポールは、高さ約8メートル、幅約0.6メートルの垂直筐体に、約15平方メートルの360度巻き付け型フレキシブルCIGS薄膜を搭載し、公称約2.4〜2.7 kWpを提供します。垂直円筒は主に太陽に面した投影面で直射日光を受けるため、計画モデルでは太陽光を無制限の自給電源ではなく補充電源として扱うべきです。高日射地域では、現実的な晴天時出力は約0.8〜1.1 kW DCピークで、通常は正午ではなく午前中頃または午後にピークとなり、1日あたり約6〜9 kWhです。カイロのエンジニアリングレビューでは、建物やイベント構造物による影、粉じんメンテナンス、季節ごとの太陽角度を検証する必要があります。高出力のドローンおよびロボットタスクは、5〜20 kWhクラスの蓄電でバッファされ、デューティサイクルに基づいてスケジュールされます。モジュールの中心はドローンバッテリーホットスワップシステムです。着陸したドローンはポールへ戻り、背面サービス式の自動バッテリー交換のためにドッキングし、マルチベイマガジンから充電済みパックを受け取り、次の承認済みタスクに再離陸できます。複数ベイにより、連続する複数のソーティ枠を支援できます。これは、夜間巡回で長時間の1回の飛行ではなく、短時間の証拠収集飛行を繰り返す必要がある場合に有用です。同じポールは、ルート計画、充電および交換状態、タスクキューイング、フリート健全性、ミッションログも管理します。ヒューマノイドまたはサービスロボットは地上レベルで巡回し、アラームに応答し、アクセス地点を点検し、空中視点と連携し、ワイヤレス充電のためにポール基部へ戻ることができます。これにより、設置地点で送電網、市、または現地電源を必要とせずに、警察レビューを支援する現場ノードが形成されます。
4. 検知、判断、行動、記録
運用ループは、単一の共通作戦状況図コマンドビュー内で、センシング、承認済み評価と対応、エッジコンピュートのスケジューリング、その後の現場運用とメンテナンスへ進みます。夜間巡回中のインシデントでは、ポールのPTZカメラとローカル認識モデルが、ゲート付近の群衆密度変化、制限レーン付近の車両滞留、臨時境界への侵入など、関連する異常をフラグします。エッジモジュールは推論とミッション支援ワークロードをローカルでスケジュールし、生フィードをポール上に保持します。コマンドオペレーターは、位置参照、時刻マーカー、信頼度帯、環境コンテキスト、推奨対応オプションを含むイベントカードを受け取ります。ドローン運用では、オペレーターがルート、点検角度、証拠タスクを承認できます。地上対応では、オペレーターがサービスロボットに対し、定義済みチェックポイントへの接近、ローカル状態の取得、空中視点との連携を指示できます。C-UAS調整は非致死的であり、人間の承認に基づきます。無許可ドローンがポールのセンシングまたは任意のパートナーセンサー入力によって検知・追跡された場合、ノードは承認後に、自側ドローンへソフトな空中ネット捕獲または接近による抑止を指令できます。レーダーはポールに内蔵されていません。承認済みのパートナーシステムがある場合にのみ、任意の外部入力として扱われます。インシデント記録は生データのダンプではありません。これは、匿名化されたイベントメタデータ、ミッションログ、バッテリー交換状態、オペレーター判断、センサー要約、イベントの保存ポリシーに従って保持されるローカル証拠参照で構成される構造化パッケージです。これが、ポールが証拠収集を支援する方法です。すなわち、変化の速い夜間インシデントを、ローカル観測と承認済みアクションのレビュー可能な連鎖へ変換します。
5. 警察購入者向け評価方法
警察関係者にとって最も信頼できる評価は、製品データシートではなく、インシデント事後検証テストです。イベント前に、購入者は対象巡回ルート、臨時制限区域、証拠カテゴリー、承認ルール、保存ポリシーを定義します。イベント中、指揮チームは一般化された性能を主張することなく、応答時間の各段階を測定します。イベントフラグからオペーターレビュー、レビューから承認済みタスク、タスクから現場確認、現場確認からインシデントパッケージまでです。バッテリー交換モジュールは、単一の航続時間主張ではなく、巡回の継続性によって評価すべきです。実務上の問いは、蓄電と太陽光補充を安全なデューティサイクル内で管理しながら、夜間経済のピーク時間帯に連続ソーティ枠が空中利用可能性を維持できるかどうかです。地上ロボット機能は、手作業による曝露や繰り返し歩行を減らすタスクで評価すべきです。臨時バリアの点検、非重大アラームへの応答、空中視点だけでは不十分な入口での連携などです。カイロのケースには、運用上の制約も含める必要があります。旧市街の通りでは、遮蔽、マルチパス通信の問題、群衆管理上の制約が生じる可能性があります。文化遺産ゾーンでは厳格な配置ルールが必要になる場合があります。天候、粉じん、清掃間隔は太陽光発電量と光学系に影響します。したがって、最終的なエンジニアリング確認には、現地ウォークスルー、許可マッピング、空域レビュー、データ取り扱いレビュー、あらゆるドローンまたはC-UAS対応に関する書面化された人間承認手順を含めるべきです。これらの制約の範囲内で、提案されるSky Hub構成は、証拠収集と応答時間管理に焦点を当てた、夜間巡回向けの一時的なオフグリッド型フィジカルAIノードを警察に提供します。
システム構成
| 項目 | 構成 |
|---|---|
| ポール形態 | SOLARTODO Sentinel Sky Hub、臨時の文化観光イベント巡回向けの照明機能を持たない純粋なスマートポール |
| エネルギーシステム | 360度巻き付け型フレキシブルCIGS補充電源と5〜20 kWhクラスの蓄電を備えた、完全オフグリッドのバッテリーバックアップ付きマイクロステーション |
| 太陽光計画の前提 | 約15 m2のCIGSラップ、約2.4〜2.7 kWpの公称出力、現実的な高日射・晴天時出力は約0.8〜1.1 kW DCピーク、1日あたり6〜9 kWh |
| エッジAIコンピュート | ポール上での推論、ワークロードスケジューリング、ローカルイベント処理向けのJetsonクラスのOrinまたはThorクラスエッジモジュール |
| カメラとセンシング | 匿名化された車両台数、群衆密度、侵入、境界認識のためのローカル認識機能を備えたPTZカメラ、9項目環境モニタリング |
| ドローン支援 | 自律ルートタスク設定、離陸、帰還、ミッションログ記録、承認済み連続ソーティ向けのマルチベイ背面サービス式バッテリーホットスワップ |
| ロボットとC-UAS調整 | 地上サービスロボットの巡回とポール基部でのワイヤレス充電、検知・追跡・自側ドローン対応を用いた非致死的かつ人間承認型のC-UAS調整 |
仕組み
- ポール搭載PTZ認識が、夜間巡回中に群衆密度の変化、侵入、または制限レーンの異常をフラグする。
- エッジAIがイベントをローカルで分類し、匿名化されたステータスメタデータのみを警察のコマンドビューへ送信する。
- 人間のオペレーターがイベントカードをレビューし、ミッションオプションを確認し、ドローンまたは地上ロボットの対応を承認する。
- ドローンはバッテリーホットスワップ後に離陸または再離陸し、割り当てられた点検視点を取得してポールへ戻る。
- ノードは、インシデントレビューのために、ミッションログ、バッテリー交換状態、オペレーター判断、ローカル証拠参照を記録する。
- 現場チームは、デフォルトでは生映像がポール外へ出ることなく、簡潔な証拠パッケージと対応状況を受け取る。
計画前提(参考値)
購入者が再計算できる例示的な計画入力値であり、達成済みの結果ではなく目標指標です。最終的なエンジニアリング確認が前提です。
| 指標 | 計画前提 | 参考値 |
|---|---|---|
| 応答時間評価 | 購入者は夜間経済巡回中に、ポールのイベントフラグからオペレーター承認済みの現場対応までの目標ワークフローを測定する | インシデントごとに4つのレビュー段階を追跡 |
| 巡回継続性 | バッテリーホットスワップにより、ピークイベント時間帯に単一の長時間飛行へ依存せず、短時間の証拠収集ソーティを繰り返し支援する | ノードあたり3〜5回の連続ソーティ枠を計画 |
| 手作業による探索の削減 | 空中および地上ロボットタスクが、臨時ゲート、サービスレーン、境界端部の反復的な手作業確認を代替する | イベント夜間あたり10〜20件の定型確認を自動化 |
| 証拠パッケージ品質 | インシデントレビューでは、広範な生フィード転送ではなく、ローカルイベントメタデータ、ミッションログ、センサー要約、オペレーター承認記録を使用する | レビュー対象インシデントごとに1つの構造化パッケージ |
| エネルギーデューティサイクル計画 | 高出力タスクは、バッテリー状態、太陽光補充ウィンドウ、ミッション優先度に照らしてスケジュールされる | ノードあたり5〜20 kWhクラスの蓄電容量範囲 |
導入機器
- 統合オフグリッドバッテリーキャビネットを備えたSOLARTODO Sentinel Sky Hubポール本体
- 360度巻き付け型フレキシブルCIGS薄膜太陽光補充レイヤー
- ローカル認識機能付きPTZカメラ
- 9項目環境センサースイート
- Jetsonクラスのポール搭載エッジコンピュートモジュール
- 自律ドローンドッキングおよびマルチベイバッテリーホットスワップモジュール
- 地上サービスロボット用ワイヤレス充電ベース
- 警察イベント運用向け共通作戦状況図コマンドソフトウェア
よくある質問
このカイロ向け提案導入は照明アップグレードですか?
いいえ。SOLARTODO Sentinel Sky Hubは、照明システムを持たない純粋なスマートポールであり、フィジカルAIエッジノードです。提案されるカイロ構成は、警察の夜間経済巡回、証拠収集、ドローン運用、ロボット支援、環境モニタリング、エッジ処理のために配置されます。照明資産ではなく、運用ノードとして計画すべきです。
バッテリーホットスワップモジュールは、警察の証拠収集にどのように役立ちますか?
夜間巡回では、特に群衆がゲート、路地、臨時バリアの間を移動する場合、短時間の空中確認を繰り返す必要がよくあります。マルチベイバッテリーマガジンにより、帰還したドローンは自動の背面サービス式交換で充電済みパックを受け取り、別の承認済みソーティへ再離陸できます。これにより、1回の飛行を任務全体と見なすのではなく、証拠収集の継続性を支援します。
インシデントワークフロー中に、どのデータがポール外へ出ますか?
意図されるデータ姿勢は、ローカル処理を第一とするものです。生映像と生センサーデータは、イベントポリシーに基づくローカル推論と証拠取り扱いのためにポール上に留まります。コマンドビューは、匿名化されたイベントメタデータ、デバイス状態、ミッションログ、オペレーター判断記録を受け取ります。これはPDPL-LGPDを意識した設計上の表現であり、認証取得を主張するものではありません。
ポールは顔を識別したり、車両ナンバープレートを読み取ったりできますか?
このケーススタディでは、顔認識またはナンバープレート認識について、実導入済みの有効な機能は主張していません。セキュリティセンシングの範囲は、匿名化された車両台数、群衆密度、侵入、境界認識です。この範囲は、臨時イベントの証拠トリアージ、ローカル処理、文化観光ゾーン向けのプライバシー志向の導入ルールにより適合します。
システムはイベント場所の都市電源に依存しますか?
いいえ。提案ノードは、ポール搭載CIGS太陽光補充を備えた完全オフグリッドのバッテリーバックアップ付きマイクロステーションとして設計されています。太陽光は、無制限の自給電源ではなく、補助的な補充レイヤーとして現実的に扱われます。ドローンおよびロボットタスクは、蓄電でバッファされ、現地固有のエンジニアリング確認後にデューティサイクルに基づいてスケジュールされます。
警察イベントシナリオでは、カウンターUASはどのように扱われますか?
カウンターUAS調整は、非致死的であり、人間の承認がある場合にのみ行われます。ポールは、自身のセンシングまたは承認済みの任意のパートナーセンサー入力を通じて無許可ドローンを検知・追跡し、その後、承認を受けて自側ドローンへソフトな空中ネット捕獲または接近による抑止を指令できます。このケースは、撃墜、ジャミング、拒否手法、自律攻撃を除外しています。
さらに詳しく
街路・キャンパス・公共空間で同様のフィジカルAI導入をご検討ですか? エンジニアリング相談を依頼する