
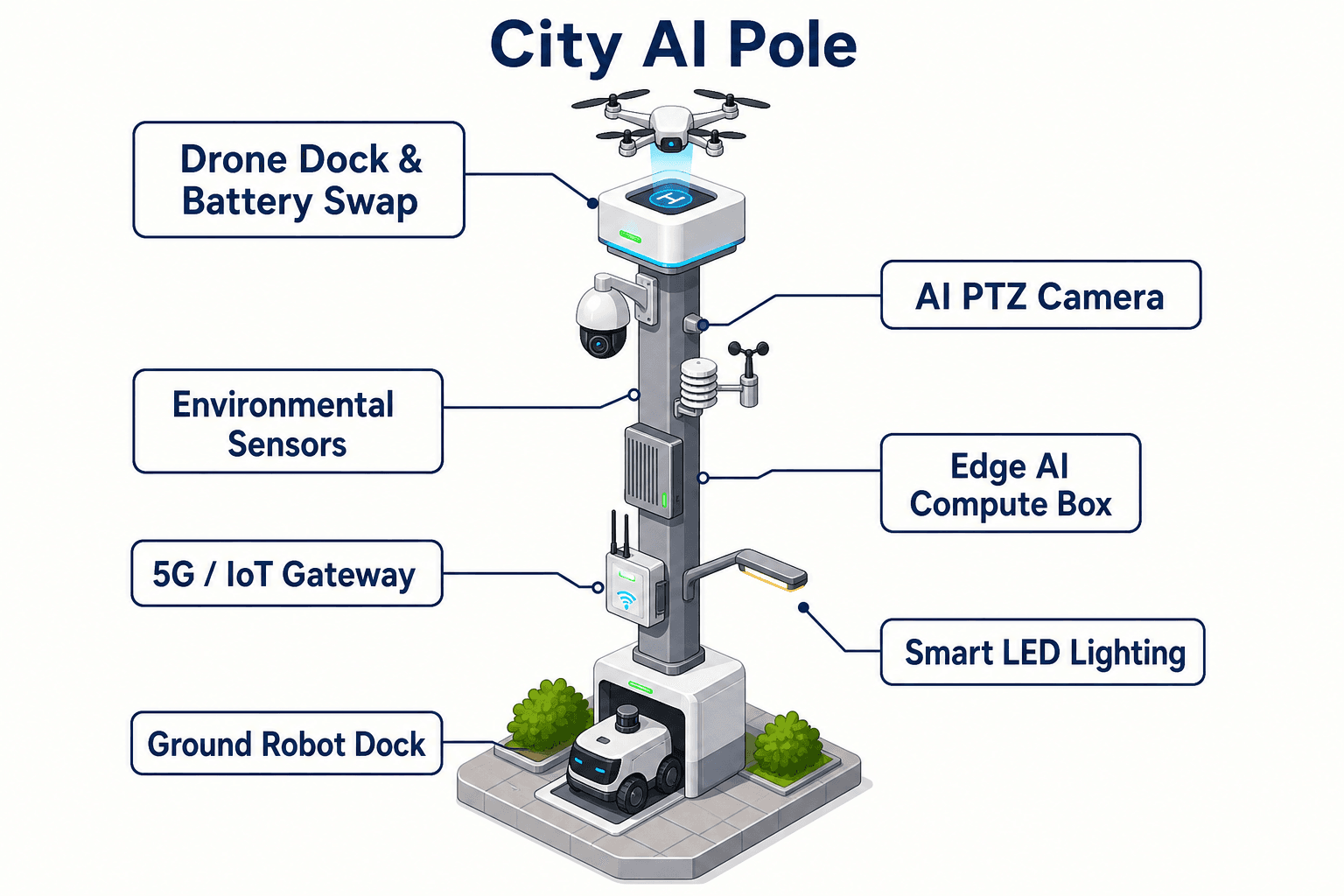
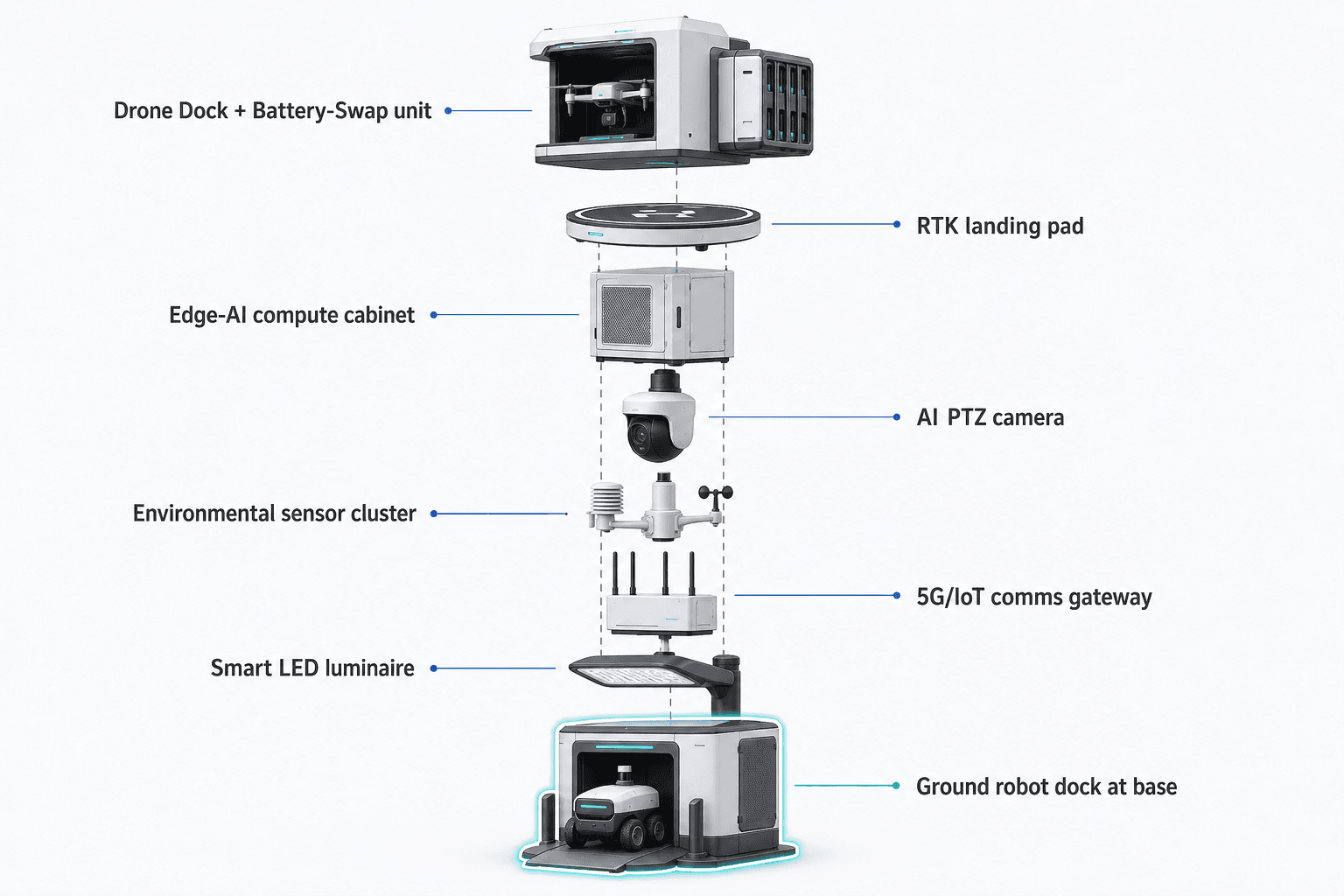
City AI Pole、この場合はSOLARTODO Sentinel Sky Hubは、完全オフグリッドの物理AI都市エッジノードである。照明機能を持たないインテリジェントポールで、バッテリー蓄電、360°巻き付け型CIGS太陽光補充、エッジコンピュート、センシング、ドローン運用、地上ロボット支援を備える。このクアラルンプール構成は、ローカル処理と人間が承認する現場対応により、港湾コリドーでの夜間交通インシデント対応を支援する。
インシデントの背景:洪水期にクアラルンプール港湾コリドーへかかる圧力
洪水期には、クアラルンプールの緊急管理チームはよくあるパターンに直面する。日没後に雨量が増え、路肩の信頼性が低下し、視界が悪化し、貨物輸送コリドー上の小さなインシデントが複数機関にまたがる事案へ発展する可能性がある。都市自体は内陸にあるが、より広域のクランバレーは、クアラルンプールの物流地区、工業団地、Port Klangゲートウェイ間の道路輸送に依存している。夜間に大型車両の立ち往生、軽微な衝突、落下物、または冠水による障害が発生した場合、最初の問題は必ずしも事象そのものではない。最初の問題は可用性である。すなわち、確認済みの現場状況、派遣可能な対応アセット、耐久性のある通信ポイントが、要員が正確な現場位置に到着するのを待たずに利用できるかどうかである。
本ケーススタディは、クアラルンプールの緊急管理関係者向けに、SOLARTODO Sentinel Sky Hubの提案型かつ例示的なコリドー展開を整理する。コリドーの原型は、都心の利便施設向けではなく、港湾連携型である。選定ノードは、交通のボトルネック、洪水リスクの高い進入路、物流入口、外周道路、待機エリアに設置され、対応チームが時間外に視認、コンピュート、ロボットによる対応を必要とする場所を対象とする。目的は、緊急サービスや交通管制当局を置き換えることではない。異常な交通状態を検知し、人間による評価を支援し、地上ロボットまたはフレンドリードローンを派遣し、ノード自体からインシデントレビュー用パッケージを記録できる、持続的な物理AIエッジレイヤーを提供することである。
ここでのSky Hubは、照明アセットではなくPUREスマートポールとして位置付けられる。照明システムは搭載しない。このポールは、バッテリー蓄電、360°巻き付け型の柔軟なCIGS薄膜補充、ポール上の推論、環境センシング、PTZセキュリティセンシング、自律ドローン運用、ドローンバッテリーのホットスワップ、地上ロボット充電、共通運用状況ビューを備えたオフグリッドのマイクロステーションとして機能する。洪水期のコリドーでは、設計上の問いは明確である。要員、車両、電源アクセスが制約される夜間対応時間帯を通じて、各ノードは稼働可能な状態を維持できるか。したがって、提案されるKPIの枠組みは、目標可用性、ソーティ継続性、ロボット待機状態、インシデントレビューの完全性、ポール外へ出す必要があるデータが非識別化メタデータのみで済む事象の割合に焦点を当てる。
交通インシデントワークフローのレビュー
インシデントレビューのシナリオは、港湾進入道路での夜間交通異常から始まる。大雨の後に車両が危険な位置で停止し、周辺交通が圧縮し始め、路肩付近の水深が不確実になる。従来の対応は、道路利用者からの通報、現場を通過する巡回車両、または固定カメラ映像に依存する場合があるが、それらはローカルな環境コンテキストを提供できないことがある。Sky Hubのコリドー構成では、最寄りのノードがPTZカメラフィードと環境計器に対してローカル認識を継続的に実行する。匿名の車両台数変化、渋滞の蓄積、制限された路肩ゾーンへの侵入、停止車両周辺の群衆密度、物流フェンスライン付近の外周動態を識別できる。通常のイベント評価において、生映像をアップロードする必要はない。
ポール上のエッジモジュールが異常をスコアリングすると、インシデントは緊急管理オペレーターが使用する共通運用状況ビューに入る。システムは、センシング、承認済み評価と対応、エッジコンピュートのスケジューリング、現場運用と保守として説明される運用ループを支援する。これは、クアラルンプールの洪水期運用にとって重要である。判断が二者択一であることは少ないためである。オペレーターは、現場が単なる故障なのか、派遣を要する衝突なのか、冠水による通行障害なのか、コリドー付近のセキュリティ侵入なのか、または交通、救助、港湾セキュリティ、保守の調整を要する複合事象なのかを判断する必要がある。
ロボット中心のワークフローは、その後、観察から現場対応へ移行する。ポール基部に配置されたヒューマノイドまたはサービスロボットは、自律巡回、近接点検、警報対応、空地連携のために出動できる。現場に接近し、バリア周辺を点検し、停止車両付近に人がいるか確認し、目視可能な水流を評価し、ワイヤレス充電のために基部へ戻ることができる。フレンドリードローンは、高所からのコリドー点検、上流側交通の観察、冠水偵察のために離陸できる。主要モジュールの焦点はバッテリースワップである。ドローンが帰還すると、複数ベイの背面サービス式マガジンが消耗したパックを充電済みパックに自動交換し、オペレーター承認、気象制限、デューティサイクルスケジューリングを条件として連続ソーティを可能にする。
これが最も重要になるのは夜間である。単一のドローン飛行でインシデントを確認することはできるが、緊急管理ワークフローを変えるのは反復的な可用性である。最初のソーティが停止車両を確認した場合、2回目は上流側の待ち行列を確認し、3回目は迂回地点を確認し、その後のソーティで復旧完了を確認できる。ノードがエネルギー、コンピュート、現場アセットをローカルにスケジューリングするため、通常巡回よりもインシデントタスクを優先し、ロボット帰還、システムヘルス、通信、証拠パッケージングのための十分な予備を確保できる。
オフグリッドノード設計と可用性計画
提案されるSky Hubノードは、完全オフグリッドステーションとして設計される。バッテリー蓄電とポール上の太陽光補充を使用し、系統電力、市電力、または現地電源に依存しない。ポール本体は、高さ約8 m、幅約0.6 mの垂直円筒形状の周囲に、約15 m²の360°巻き付け型柔軟CIGS薄膜を備える。定格範囲は約2.4から2.7 kWpだが、実際のエンジニアリング上の前提はより保守的である。垂直円筒は、全面を同時にではなく、太陽に面した投影面で直達日射を受ける。高日射の晴天空地域では、現実的な出力はDCピークで約0.8から1.1 kWであり、通常は正午ではなく午前中頃または午後中頃にピークを迎え、1日あたり約6から9 kWhとなる。
クアラルンプールの熱帯条件では、降雨、湿度、雲量、洪水期の天候が補充量を低下させる可能性があるため、さらに規律ある計画姿勢が必要である。したがって、CIGS層は、無制限の太陽光単独運用を約束するものではなく、バッテリーでバックアップされたマイクロステーション向けの補助的な補充として扱うべきである。設計では、現地エンジニアリング、ミッション頻度、予備時間モデリングの後に選定される5から20 kWhクラスの蓄電を使用する。ドローンとロボットのタスクは蓄電によりバッファされ、デューティサイクルによりスケジューリングされる。コマンドビューには、バッテリー状態、スワップマガジン状態、ロボット充電状態、コンピュート負荷、ミッションキュー優先度が表示される。
緊急管理の購入者にとって、可用性はスローガンではなく計画指標である。目標計画モデルでは、洪水期の夜間に何台のノードが待機状態であるべきか、手動サービス前に何回の連続ドローンソーティが必要か、ロボットがどの頻度で出動し帰還できる必要があるか、高優先度の交通インシデント後にどの程度の予備を残すべきかを定義するべきである。バッテリースワップマガジンは、ドローンのミッション継続性を低速な単一パック充電から切り離すため、可用性を高める。複数の充電済みベイにより、ノードが再充電サイクル、熱制限、残存予備を管理しながら、複数回の連続ソーティが可能になる。
同じ可用性ロジックはデータ処理にも適用される。生映像とセンサーストリームはローカル処理のためにポール上に保持される。コマンドビュー、レポート、または緊急管理システムとの連携のためにノード外へ出る可能性があるのは、非識別化されたイベントおよび状態メタデータのみである。このPDPL/LGPD志向のアプローチは、悪天候時の帯域依存を低減し、プライバシー・バイ・デザインの計画を支援する。ただし、特定のマレーシア展開に対する最終的な法務、サイバーセキュリティ、エンジニアリング確認が前提となる。
ドローンバッテリースワップ支援を備えたロボット主導対応
このクアラルンプールのコリドー設計における差別化された運用価値は、地上ロボット対応とドローンバッテリースワップ継続性の組み合わせにある。地上ロボットは近距離対応アセットである。ポール基部を離れ、直近の道路端を点検し、制御された距離で停止車両に接近し、排水口やバリアを確認し、人間の対応者を最初のステップとして視界不良の中へ送り込むことなく、オペレーターへローカル状況を提供できる。上空のフレンドリードローンと連携し、航空視点のコンテキストを使ってより安全なルートを選択したり、インシデント領域が拡大しているかを確認したりできる。
ドローンは迅速な広域スカウトである。ノードから離陸し、コリドー区間を巡回し、上流側および下流側の交通を点検し、バッテリー交換のために帰還し、フォローアップタスクのために再離陸できる。ホットスワップ工程は背面サービス式かつ自動化されている。着陸後、複数ベイのマガジンが消耗したバッテリーを充電済みパックに交換する。これにより、ミッション承認と気象制約を条件として、現地にオペレーターがいなくても洪水期インシデントレビューを反復できる。価値は単に飛行時間が長くなることではなく、評価サイクル間の運用中断が短くなることである。
カウンターUAS連携は、物流および港湾連携施設付近の重要インフラ区域向けの制御された安全機能として含まれる。ポールは、自身のセンシングと、承認済みパートナーシステムにより外部提供される場合に限るレーダーを含む任意のパートナーセンサー入力を使用して、無許可ドローンを検知および追跡できる。その後、ポールは人間の承認を受けた非運動的対応、例えばソフトな空中ネット捕獲や近接接近による抑止のために、自身のフレンドリードローンへ指令を出せる。これはオペレーター制御下の連携として位置付けられ、自動エスカレーションではない。
ノードの環境モニタリングも、ロボットとドローンの判断を支援する。風速、風向、温度、湿度、気圧、騒音、PM10、PM2.5、照度は、ミッションゲーティングとインシデントコンテキストに寄与する。風や雨の条件によりドローンソーティが適さない場合、ロボットが主要な現場アセットであり続けることができる。表面水や落下物によりロボット移動が危険な場合、ドローンが先に空中点検を提供できる。この柔軟な空地パターンこそが、このシステムを従来のポール搭載センサーではなく、物理AIエッジノードとして評価する方が適切である理由である。
緊急管理購入者向けの評価モデル
提案される展開は、汎用的な技術実証ではなく、インシデントレビュー手法を通じて評価されるべきである。選定された各コリドー地点は、洪水期との関連性、対応距離、通信オプション、物理セキュリティ、日射条件、安全なロボット移動、ドローン離陸クリアランス、保守アクセス、関係者のコマンドワークフローとの統合について評価されるべきである。購入者は、展開前に目標しきい値を定義する必要がある。ノード稼働率目標、最小予備エネルギー、夜間対応時間帯あたりのドローンソーティ数、ロボット待機率、イベントからレビュー用パッケージまでの完全性、異常フラグから人間の判断までの許容時間である。
ここでは、国家規模の展開数量、カバレッジエリア、または達成済み性能結果は主張しない。信頼性のあるクアラルンプールのプログラムは、優先コリドー区間のマッピング、代表的なノード位置の選定、ローカルな気象、空域、道路安全、データガバナンス要件下での運用モデル検証から開始するだろう。エンジニアリング確認により、最終的な蓄電容量、太陽光発電量の前提、基礎設計、通信経路、ロボットの経路範囲、目標デューティサイクルに必要なバッテリーマガジンベイ数が決定される。
インシデントレビュー用パッケージが管理上のアウトプットである。各交通イベントについて、ノードはローカル証拠を保持し、非識別化メタデータを生成し、オペレーター判断を記録し、ドローンとロボットのタスク割り当てを記録し、バッテリースワップ状態遷移を表示し、環境条件を文書化し、発生した現場対応を要約できる。緊急管理チームは、これらのパッケージを使用して、可用性目標が満たされたか、対応アセットが適切に割り当てられたか、次の洪水期対応時間帯の前にコリドーカバレッジを調整すべきかをレビューできる。
港湾連携型のクアラルンプールコリドーにとって、戦略的メリットはエッジでの運用継続性である。このノードは、緊急管理者に対し、ローカルでオフグリッドのセンシング、コンピュート、空地対応、レビューのポイントを提供する。それは、無制限の太陽光自律性を主張せず、生映像をデフォルト運用モデルとしてポール外へ送信せず、特定名の第三者プラットフォームに依存せず、照明製品として位置付けることなく実現される。実務上の購入者の問いは測定可能なものになる。洪水期の状況により初期確認が最も難しくなる時に、どのコリドーインシデントが持続的な夜間可用性を必要とし、ロボットとドローンの対応準備を維持するには何台のSky Hubノードが必要なのか。
システム構成
| 項目 | 構成 |
|---|---|
| ポール形状 | SOLARTODO Sentinel Sky Hub PUREスマートポール、照明機能を持たない円筒形エッジノード本体、高さ約8 m、360° CIGS巻き付け |
| エネルギーシステム | 5-20 kWhクラスの蓄電と補助的なCIGS太陽光補充を備えた、完全オフグリッドのバッテリー支援マイクロステーション。現地エンジニアリングが前提 |
| ドローンバッテリースワップ | 充電済みパック交換と連続した承認済みソーティのための、背面サービス式自動複数ベイバッテリーマガジン |
| 地上ロボット支援 | ヒューマノイドまたはサービスロボットの巡回、点検、警報対応、帰還充電運用のための基部側ワイヤレス充電ゾーン |
| エッジAIコンピュート | ローカル映像、センサー、ミッションスケジューリング負荷向けの、JetsonクラスのOrinまたはThorクラスのポール上推論モジュール |
| センシングパッケージ | AI PTZ認識に加え、風速、風向、温度、湿度、気圧、騒音、PM10、PM2.5、照度 |
| コマンドビュー | 異常レビュー、タスクキューイング、ミッションログ、フリートヘルス、バッテリー状態、人間による承認のための共通運用状況ダッシュボード |
仕組み
- ポール上のPTZ認識が、港湾コリドー付近の夜間交通異常、待ち行列の蓄積、または制限ゾーン侵入をフラグする。
- エッジAIがイベントをローカルでスコアリングし、気象、大気質、騒音、照度の測定値と組み合わせる。
- 共通運用状況ビューが、人間による承認のために緊急管理オペレーターへイベントを提示する。
- ノードが地上ロボットを派遣し、条件が許せば、コリドー点検のためにフレンドリードローンを離陸させる。
- ドローンは自動バッテリーホットスワップのために帰還し、ロボットがワイヤレス充電へ戻る間、フォローアップ視点のために再展開される場合がある。
- ノードは、レビュー用にミッションログ、バッテリー状態遷移、オペレーター判断、非識別化インシデントメタデータを記録する。
計画前提(参考値)
購入者が再計算できる例示的な計画入力値であり、達成済みの結果ではなく目標指標です。最終的なエンジニアリング確認が前提です。
| 指標 | 計画前提 | 参考値 |
|---|---|---|
| 夜間対応可用性 | 選定されたコリドーの夜間において、各ノードがインシデントセンシング、ロボット派遣、少なくとも1回のドローンソーティに対応可能な状態を維持する目標割合 | ~95% 計画目標 |
| ドローンソーティ継続性 | バッテリースワップマガジンにより、気象条件と予備制限を前提として、手動サービス前に洪水期の点検サイクルを反復できる | イベント時間帯あたり~3-5回の連続承認済みソーティ |
| ロボット現場点検 | 人間の要員が現場に入る前に、選定された低から中リスクの交通異常に対して、地上ロボットが初期確認点検を処理する | 夜間時間帯あたり~2-4件の自動点検タスク |
| 手動巡回の代替 | 規制と安全ルールが許す場合、通常の夜間コリドーチェックを車両巡回からスケジュールされたドローンおよびロボット巡回へ移行する | 週あたり~6-10回の巡回チェックを自動化 |
| インシデントレビュー完全性 | 各フラグ付きイベントが、非識別化メタデータ、タスク履歴、環境コンテキスト、オペレーター判断を含むローカルログパッケージを生成する | ~90% 目標パッケージ完全性 |
導入機器
- SOLARTODO Sentinel Sky Hubポール形状の物理AIエッジノード
- 360°巻き付け型柔軟CIGS補充を備えたバッテリー支援オフグリッド電源キャビネット
- AI PTZカメラとローカル認識スタック
- 9パラメータ環境モニタリングパッケージ
- 複数ベイバッテリーホットスワップマガジンを備えた自律ドローンベイ
- ヒューマノイドまたはサービスロボット用ワイヤレス充電ベース
- ポール上のJetsonクラスエッジコンピュートモジュール
- 承認済み運用のための共通運用状況コマンドソフトウェア
よくある質問
このクアラルンプールのケーススタディは、政府による実運用展開を主張していますか?
いいえ。これは、クアラルンプールおよびクランバレーの文脈で、港湾連携型コリドー対応を評価する緊急管理購入者向けの提案型かつ例示的な構成です。特定の顧客、ノード数量、カバレッジエリア、達成済み応答時間、認証済み結果を主張するものではありません。最終的な展開範囲には、エンジニアリング、法務、空域、安全、調達の確認が必要です。
このコリドー用途で可用性が主要KPIとなるのはなぜですか?
洪水期の夜間インシデントは、雨、渋滞、道路状況により手動対応が遅れる場合があり、最初の確認済み現場状況が遅れて届くため困難です。可用性は、対応時間帯にノードがセンシング、コンピュート、ドローンソーティ、ロボット待機、通信、証拠ログ記録をオンラインに維持できるかを測定します。単一の飛行時間やカメラ仕様よりも優れた計画KPIです。
ドローンバッテリーホットスワップは緊急対応をどのように改善しますか?
バッテリースワップマガジンは、空中点検間の中断を短縮します。着陸したドローンは、自動化された背面サービス式交換により充電済みパックを受け取り、その後別の承認済みタスクのために再展開できます。交通インシデントでは、1回のソーティでイベントを確認し、別のソーティで上流側の待ち行列を点検し、その後のソーティで復旧を確認することが可能になります。いずれもエネルギー予備と気象制限により管理されます。
地上ロボットはドローンと比べてどのような役割を担いますか?
ロボットは近距離点検アセットです。ポール付近を巡回し、制御された距離で停止車両エリアへ接近し、落下物を点検し、道路面の水を観察し、ワイヤレス充電へ戻ることができます。ドローンはより広い上空からのコンテキストを提供します。両者は空地連携を支援し、オペレーターがインシデント種別、気象、経路条件に基づいて最も安全なアセットを選択します。
処理のために生映像はポール外へ送信されますか?
想定される運用モデルでは、生映像とセンサーデータはローカルエッジ処理のためにポール上に保持されます。コマンドビューが受け取る可能性があるのは、異常種別、アセット状態、環境測定値、ミッションログなどの非識別化されたイベントおよび状態メタデータです。これはPDPL/LGPD志向の設計アプローチであり、すべての現地に対する法的認証完了または自動的な適合を示すものではありません。
Sky Hubは太陽エネルギーだけで動作しますか?
システムは完全オフグリッドですが、それは無制限の太陽光単独運用を意味するものではありません。360° CIGS巻き付けは、バッテリーでバックアップされたマイクロステーション向けの補助的な補充層です。実用出力は太陽角度、天候、現地の日射条件に依存するため、ドローンとロボットのミッションは5-20 kWhクラスの蓄電でバッファされ、デューティサイクルによりスケジューリングされます。
重要インフラ付近の無許可ドローン活動はどのように扱われますか?
ノードは、無許可ドローン事象に対する検知、追跡、指令連携を支援でき、対処には人間による承認が必要です。許可される場合、フレンドリードローンはソフトな空中ネット捕獲または近接接近による抑止のためにタスク化されることがあります。レーダーはポールに内蔵されていません。現地固有設計における任意のパートナーセンサー入力としてのみ検討されます。
さらに詳しく
街路・キャンパス・公共空間で同様のフィジカルAI導入をご検討ですか? エンジニアリング相談を依頼する