
A City AI Pole, in this Lisbon scenario, is a SOLARTODO Sentinel physical-AI edge node: one integrated smart pole combining on-pole sensing, embedded edge-AI inference, resilient communications workflows, a drone dock, and a base-docked patrol robot. The proposed deployment supports city-management border-watch around a CBD campus perimeter during heatwave-related network stress.
Lisbon CBD Task And Cross-Department Need
This illustrative Lisbon deployment is framed around a city-management task, not a product purchase: maintaining reliable border-watch around a municipal campus perimeter in the CBD when a heatwave increases operational stress and a network outage limits normal remote monitoring. The target environment is a dense central district setting, such as a city-service campus, mobility operations yard, administrative perimeter, waterfront public-realm interface, or mixed-use municipal asset near high-footfall streets. In this context, “border-watch” means watching the boundary of a city-managed site: gates, fences, service entrances, delivery lanes, parking edges, and public-facing perimeter points.
The stakeholder is not a single security team. A workable deployment would be cross-department by design. City management owns the service objective and budget discipline. Municipal security defines escalation rules. Facilities teams own power, pole placement, base access, and maintenance windows. IT and communications teams define network behavior during partial or full backhaul loss. Mobility and public-space teams review how robot patrol routes avoid pedestrians, ramps, kerbs, bike lanes, and night-time crowding. Legal and data-protection reviewers define what is recorded, retained, masked, or escalated.
The seasonal trigger is a heatwave. In Lisbon, high-temperature periods can extend outdoor activity into later hours, increase pressure on transport corridors, and raise the importance of uninterrupted perimeter operations around city assets. A heatwave can also expose weaknesses in communications cabinets, power planning, and staff availability. The pain point in this case is network outage: if a central video platform, backhaul link, or cloud path is unavailable, a conventional remote-monitoring model may lose visibility exactly when operating conditions are less forgiving.
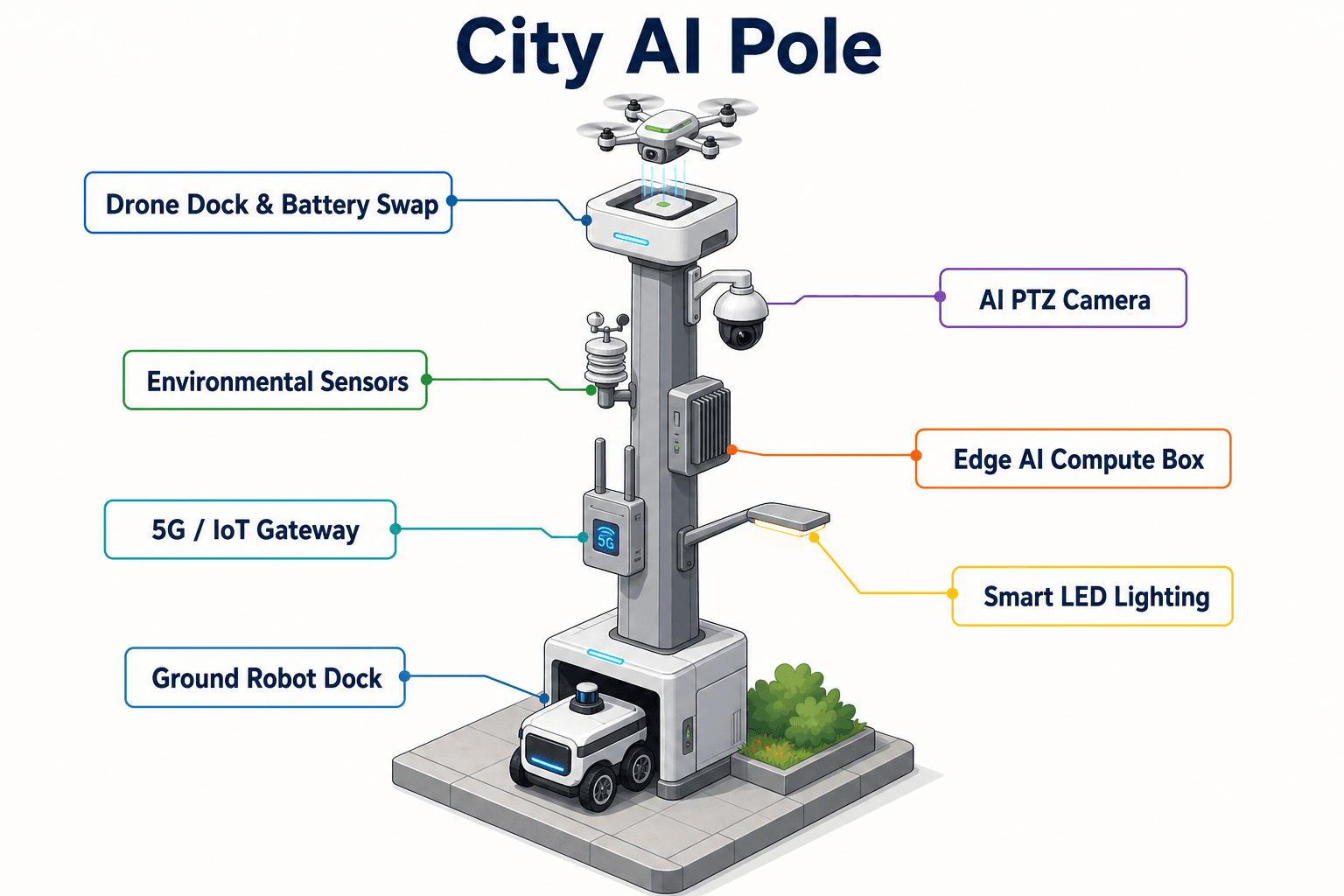
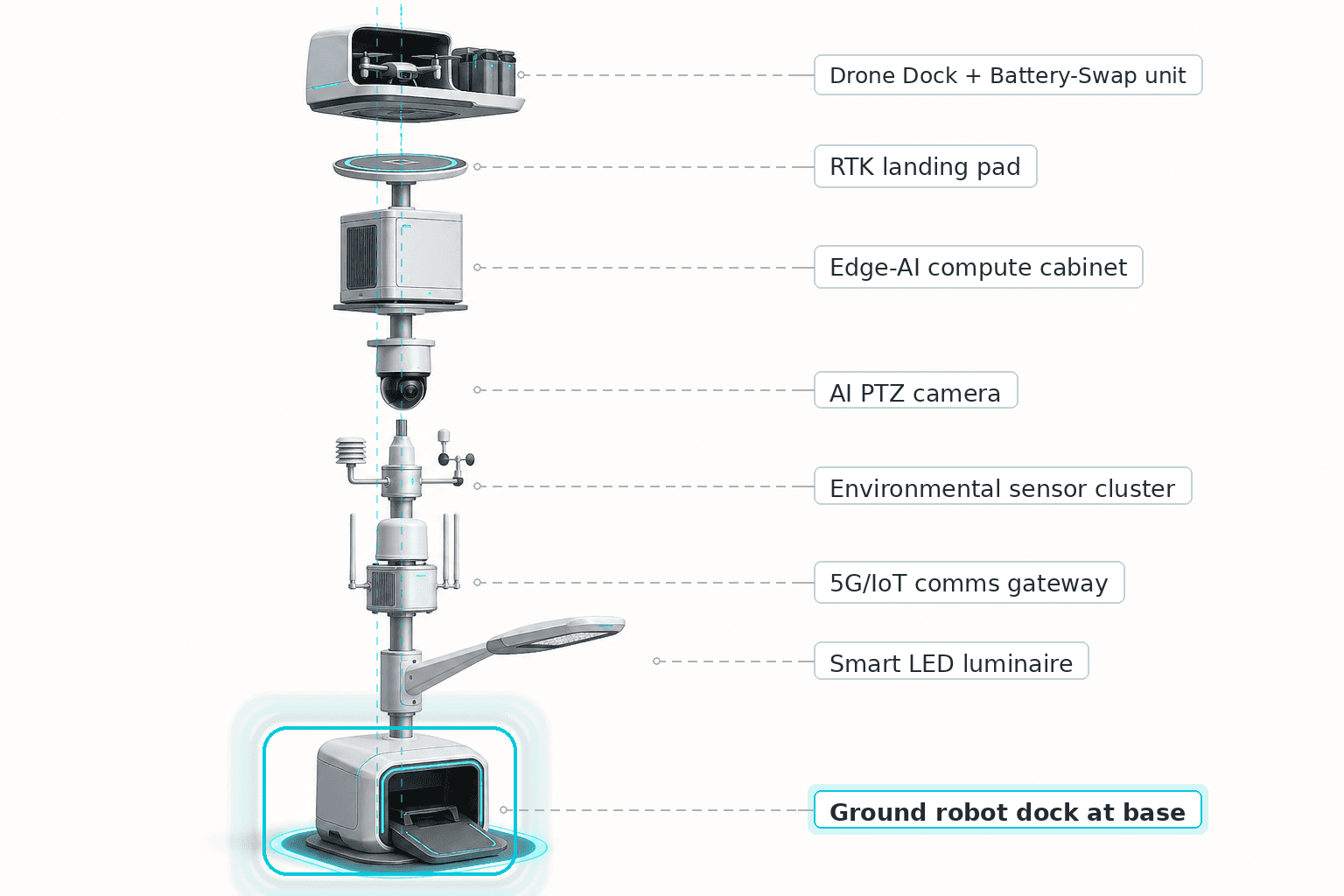
The proposed response is a campus-perimeter deployment of SOLARTODO Sentinel Physical-AI edge-node poles. Each node is a slim cylindrical or octagonal smart pole with a brushed-metal body, midnight-blue photovoltaic mid-section, cyan LED accent rings, an integrated drone dock on top, a patrol robot dock at the base, on-pole sensing, and embedded edge-AI inference. The case study treats the pole as integrated city infrastructure. It is not sold here as a standalone drone or standalone robot package; the robot and drone are modules within a configurable city edge-node system, subject to final engineering confirmation.
Robot-Led Perimeter Watch Under Outage Conditions
The primary operational module in this case is the patrol robot. The robot is docked at the pole base with auto-charging and is used to extend the node’s observation from a fixed point into short, repeatable patrol loops around the campus boundary. In a Lisbon CBD campus, that can mean checking service gates, recessed doorways, temporary barriers, loading entrances, fence-line blind spots, and areas where a fixed PTZ camera may lose line of sight because of street furniture, parked vehicles, slope, or crowds.
The operational scenario is intentionally narrow: campus-perimeter border-watch during a network outage. The robot does not replace policy, guards, or emergency services. It provides a mobile sensing and presence layer that city teams can task locally when the pole’s edge-AI system flags an anomaly or when scheduled patrol logic calls for a route check. The robot can be quadruped or wheeled, depending on site surfaces, kerb transitions, slope, docking constraints, and public-realm rules. The final form would be confirmed during engineering review.
The SOLARTODO Sentinel pole supports this workflow because decision-making is not fully dependent on a cloud round-trip. The on-pole embedded edge-AI accelerator performs inference locally in a ventilated cabinet. The PTZ camera, weather and environmental sensor, and optional 4D radar or LiDAR feed the edge node so that the system can classify events, score them, and trigger local actions even when backhaul is degraded. That matters for OPEX because the expensive failure mode is not only an incident; it is the manual response pattern created by uncertainty. If every outage forces extra patrol staffing, repeated supervisor checks, and manual perimeter sweeps, operating cost rises quickly.
For Lisbon city management, the robot-led pattern should be evaluated as an OPEX control mechanism. The target is fewer unnecessary manual perimeter walks, fewer blind dispatches, and better prioritization of staff time during heatwave periods. The KPI framing should be based on planning inputs and evaluation metrics: number of automated patrol loops per week, number of avoided duplicate checks, percentage of events resolved locally, number of outage-period escalations, and maintenance hours per node. No achieved result is claimed here; these are evaluation categories for a proposed pilot or procurement specification.
Comms-Focused Sentinel Node Configuration
The module focus for this proposed deployment is communications. In practice, that does not mean presenting the pole as a telecom product or inventing a fixed network architecture. It means configuring the Sentinel node so that the city task continues in a controlled way when the usual network path is unavailable. The key design principle is local continuity: sense locally, infer locally, decide locally where policy allows, dispatch the robot locally, and record events for later synchronization when connectivity returns.
The edge-AI cabinet is central to this communications strategy. Because inference occurs on the pole, the node can continue to process camera and sensor inputs without waiting for cloud analysis. During a backhaul outage, it can prioritize local alerts, robot dispatch instructions, event clips, and status logs. Once connectivity is restored, the system can forward retained records into the city’s chosen operations environment, subject to data-governance and retention rules. This proposed behavior should be validated during engineering confirmation and acceptance testing.
The visual form also matters in a CBD deployment. The Sentinel is specified as one slim cylindrical or octagonal pole with a brushed-metal body, midnight-blue photovoltaic mid-section, and cyan LED accent rings. A white SOLARTODO drone dock or nest sits on top with a clamshell roof, a precision RTK landing pad, and a battery hot-swap magazine for rapid automated battery change without citing a fixed swap time. The ground unit docks at the base. Keeping these modules in one city pole reduces the need for scattered cabinets, temporary equipment, or multiple disconnected field assets.
Power planning remains site-specific. Sentinel may be supplied by grid power or a wind-solar hybrid configuration. In Lisbon, final selection would depend on shade, streetscape constraints, heritage context, wind exposure, power availability, maintenance access, and civil works rules. The photovoltaic mid-section is part of the pole architecture, but it should not be treated as a universal power guarantee. Heatwave operation should be checked against cabinet ventilation, battery duty cycle, sensor uptime, docking reliability, and safe public-realm access.
Cross-Department Operating Model
A credible deployment depends on shared operating rules before installation. City management should define the perimeter-watch objective and the OPEX evaluation model. Security should define what counts as a low, medium, or high-priority anomaly. IT should define outage modes, acceptable local processing behavior, and synchronization rules. Facilities should confirm pole foundations, grid connection or hybrid power feasibility, cabinet access, and cleaning schedules. Public-space teams should confirm that robot routes do not conflict with pedestrians, accessibility routes, emergency access, cycle flows, or temporary event layouts.
The proposed workflow can be organized in three operating states. In normal mode, the PTZ camera and sensors monitor the campus perimeter, the robot performs scheduled or event-based patrols, and records move through the standard city network path. In degraded-network mode, the embedded edge-AI accelerator continues on-device inference, the pole prioritizes local decisioning, and the robot can still be dispatched for defined checks. In restored-network mode, retained event data and logs are synchronized according to approved policy. This structure helps departments decide what must remain available during outage conditions and what can wait.
The drone unit is included as part of the integrated pole, but the primary topic here remains the robot. The drone dock can support top-down inspection where permitted and engineered, using the white SOLARTODO dock with clamshell roof, RTK landing pad, and automated battery hot-swap magazine. For a dense Lisbon CBD campus perimeter, drone use may be more constrained than robot use because of airspace, public safety, weather, and site rules. The practical design should therefore avoid relying on flight as the only continuity mechanism.
Data handling should be defined as part of the city-management specification. The case supports on-device inference and low-latency action without a cloud round-trip, but recording rules, redaction, retention periods, access controls, and escalation responsibilities must be set by the buyer and local compliance review. The system should be evaluated as an operational edge-node configuration, not as an autonomous authority. Human supervisors remain responsible for policy decisions, emergency escalation, and any action that requires formal intervention.
OPEX Evaluation And Pilot Readiness
The OPEX case should be built from recomputable assumptions rather than claimed savings. A Lisbon buyer can model current manual perimeter patrol frequency, overtime exposure during heatwaves, duplicated checks during network outages, false dispatch rates, maintenance visits, and downtime. The proposed Sentinel deployment then becomes a controlled pilot question: can an integrated pole with local inference, a docked patrol robot, resilient communications workflows, and defined event recording reduce the amount of staff time spent verifying low-confidence perimeter events?
A campus-perimeter pilot should start with site surveys rather than quantity claims. Engineering teams would confirm line of sight, robot route geometry, docking location, pole foundation, grid or wind-solar hybrid power, cabinet ventilation, camera views, optional 4D radar or LiDAR need, communications fallback behavior, and maintenance access. The buyer should also define stop conditions: weather thresholds, public event restrictions, network outage test windows, and manual override procedures.
Procurement language should remain specific and careful. The buyer is not purchasing a generic camera pole, a standalone drone, or a standalone robot. The proposed asset is SOLARTODO Sentinel, a Physical-AI City Edge Node with integrated sensing, edge compute, drone dock, ground robot dock, power options, and local inference. Configuration is custom and subject to engineering confirmation. No prices, coverage guarantees, detection rates, or operational results should be inferred from this illustrative case study.
For Lisbon city management, the useful outcome of a pilot would be a decision framework: which perimeter tasks can be automated, which require human review, which outage conditions the node can tolerate, and which OPEX inputs move enough to justify expansion. The most important lesson is that the communications design and robot operating model must be specified together. During a heatwave network outage, a robot is only operationally useful if the edge node can still detect, decide, act, and record in a controlled local loop.
システム構成
| 項目 | 構成 |
|---|---|
| Pole body | Slim cylindrical or octagonal brushed-metal pole with midnight-blue photovoltaic mid-section and cyan LED accent rings |
| Edge AI compute | Ventilated on-pole cabinet with embedded edge-AI accelerator for on-device inference and low-latency local decisions |
| Robot module | Generic docked patrol robot at the pole base with auto-charging, configured for campus-perimeter route checks |
| Drone module | White SOLARTODO dock with clamshell roof, generic quadcopter, RTK landing pad, and automated battery hot-swap magazine |
| Sensing package | PTZ camera, weather and environmental sensor, with optional 4D radar or LiDAR subject to site survey |
| Power option | Grid supply or wind-solar hybrid configuration, subject to Lisbon site engineering confirmation |
| Comms continuity | Local inferencing, event prioritization, and store-forward operating workflow for degraded-network periods |
仕組み
- PTZ camera or optional radar/LiDAR flags a perimeter anomaly at the CBD campus boundary.
- The embedded edge-AI accelerator classifies and scores the event locally without a cloud round-trip.
- If policy allows, the pole dispatches the docked patrol robot to verify the gate, fence line, or service entrance.
- During a network outage, the node prioritizes local alerts and retains event evidence for later synchronization.
- A city supervisor reviews the record, confirms escalation status, and updates the OPEX evaluation log.
計画前提(参考値)
購入者が再計算できる例示的な計画入力値であり、達成済みの結果ではなく目標指標です。最終的なエンジニアリング確認が前提です。
| 指標 | 計画前提 | 参考値 |
|---|---|---|
| Inspection labor | Robot patrol automates selected perimeter checks that would otherwise require manual walking rounds | ~10-20 patrol loops/week targeted for automation |
| Outage response | Local edge inference reduces blind dispatches when central monitoring or backhaul is unavailable | ~25-40% of low-priority checks targeted for local verification |
| Supervisor review | Event clips and robot status logs are queued for review after connectivity returns | ~1 consolidated review batch per outage event |
| Heatwave staffing | Automated patrol windows cover late-evening perimeter checks during high-temperature periods | ~2-4 evening patrol windows/week targeted |
| Maintenance planning | Integrated pole, dock, robot charging, and edge cabinet are inspected under one field-maintenance visit | ~1 planned maintenance visit/node/month as a planning input |
導入機器
- SOLARTODO Sentinel smart pole body with photovoltaic mid-section and LED accent rings
- On-pole ventilated edge-AI inference cabinet
- PTZ camera and weather/environment sensor package
- Optional 4D radar or LiDAR sensing module
- White SOLARTODO drone dock with clamshell roof and RTK landing pad
- Generic quadcopter with automated battery hot-swap magazine integration
- Base-docked generic patrol robot with auto-charging
- Grid or wind-solar hybrid power connection package
よくある質問
Is this a real deployment result in Lisbon?
No. This is a proposed and illustrative B2B deployment configuration for Lisbon city-management planning. It does not claim an awarded project, installed quantity, achieved detection rate, coverage area, customer name, certification, or operational result. The purpose is to show how SOLARTODO Sentinel could be specified for a CBD campus-perimeter border-watch task, subject to final engineering confirmation.
Why is the robot the primary module for this Lisbon scenario?
The robot is the primary module because the task is campus-perimeter border-watch, where fixed cameras can miss recessed gates, service entrances, parked-vehicle shadows, or temporary barriers. A docked patrol robot can perform short verification loops from the pole base, reducing the need for manual checks during heatwave periods and degraded-network conditions while keeping human supervisors in control.
How does the system operate during a network outage?
The proposed configuration relies on on-pole inference rather than a mandatory cloud round-trip. The embedded edge-AI accelerator processes sensor inputs locally, scores events, dispatches the robot where policy permits, and retains event records for later synchronization. Exact outage behavior, alert routing, retention, and fallback communications must be confirmed by the buyer’s IT and engineering teams.
Does the SOLARTODO Sentinel replace guards or emergency response teams?
No. The Sentinel is an integrated city edge-node pole intended to support detection, verification, patrol automation, and recordkeeping. It does not replace human authority, emergency services, or municipal policy decisions. In this case study, the robot helps verify low-confidence perimeter events so staff can prioritize responses based on better local evidence.
Can the drone be used as the main inspection tool?
The drone is part of the integrated SOLARTODO Sentinel pole, with a white dock, clamshell roof, RTK landing pad, and automated battery hot-swap magazine. However, this Lisbon scenario is robot-led because dense CBD conditions may constrain flight. Drone use should be treated as optional and subject to site rules, safety review, weather, and engineering confirmation.
What should Lisbon city management measure in a pilot?
The buyer should measure planning KPIs rather than assume savings upfront: manual patrols avoided, outage-period events verified locally, supervisor review time, maintenance visits, robot route completion, and escalation quality. These inputs allow the city to recompute OPEX impact using its own labor model, heatwave operating plan, network architecture, and service requirements.
さらに詳しく
街路・キャンパス・公共空間で同様のフィジカルAI導入をご検討ですか? エンジニアリング相談を依頼する