
City AI Poleは、ローカルセンシング、エッジコンピュート、バッテリー支援型の太陽光補充、ドローン運用、ロボット運用を、照明を持たないポール形態に統合した完全オフグリッドの物理AIエッジノードです。このマスカット向け構成では、SOLARTODO Sentinel Sky Hubが旧市街の河川横断断面ポイントにおける休暇期間中の夜間巡回を支援し、証拠をローカルで処理し、匿名化済みのイベントメタデータとステータスメタデータのみを共有します。
1. パイロットの背景:旧市街マスカット、休暇期間の夜間、河川横断断面の証拠
このパイロット報告構成は、オマーンのマスカット旧市街における夜間巡回業務を担当するエコ環境関係者向けに作成されています。焦点は、交通照明、街路景観の装飾、あるいは一般的なスマートシティのショーケースではありません。都市としての課題はより限定的かつ運用寄りです。すなわち、休暇期間中に環境インシデント、時間外の移動、混雑、不法投棄、騒音、煙、粉じん、または無許可アクセスの記録が必要となり得る、選定された河川横断断面ポイントに物理AIエッジノードを設置することです。
旧市街マスカットには実務上の監視課題があります。巡回チームは、夜間、証拠収集の標準化が難しくなる時間帯に、ウォーターフロント端部、ワジ、排水路横断部、文化遺産に隣接する公共空間、サービスレーン、境界ポイントをカバーする必要が生じる場合があります。休暇期間というトリガーは運用パターンを変化させます。訪問者の増加、夕方以降の活動時間の長期化、一時的なサービス負荷、そして個人データを過剰に収集せずにレビュー可能な明確な記録へのニーズが高まります。
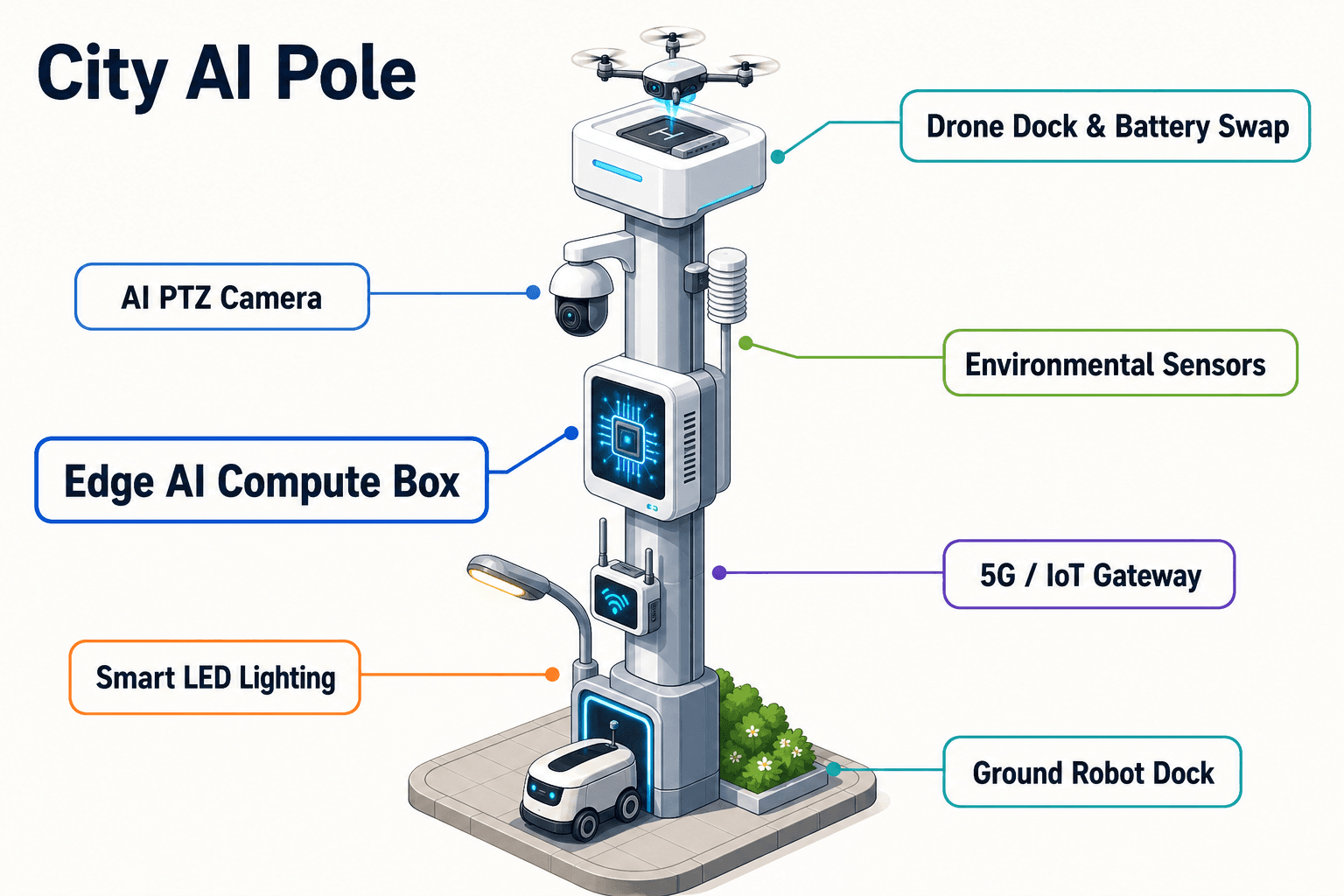
提案されるSOLARTODO Sentinel Sky Hub構成では、city-ai-poleカテゴリを照明資産ではなく都市型エッジノードとして使用します。各Sky Hubは照明システムを持たないPUREスマートポールです。その役割は、センシング、コンピュート、エネルギー貯蔵、ドローン運用、ロボット運用、証拠ワークフロー調整を、単一のオフグリッド型マイクロステーションに集約することです。
本パイロットは、特に設置場所の選定、風況、太陽光発電量、無線計画、ドローン飛行許可、地上ロボットのルート安全性、現地運用手順について、最終的なエンジニアリング確認を前提とします。意図しているのは、達成済みの結果を主張することではなく、信頼できる導入パターンと評価フレームワークを定義することです。
2. 導入パターン:ローカル証拠ステーションとしての河川横断断面ノード
提案される導入形態は河川横断断面型です。Sky Hubノードは、エコ環境チームが両岸、横断部へのアプローチ、または隣接するサービス通路から反復可能な証拠を取得したい、選定された横断断面の観測ポイントに配置されます。マスカットでは、これは旧市街の排水路、ワジ隣接ルート、ウォーターフロント端部、または夜間に状況が急変する管理境界の移行部を意味する場合があります。
Sky Hubポールは完全オフグリッドのステーションとして動作します。ポールは、高さ約8 meters、幅約0.6 metersの垂直円筒形ボディ全体に、約15 square metersの360-degree巻き付け型フレキシブルCIGS薄膜太陽光発電を搭載します。この太陽光発電層は補充層であり、無制限のエネルギーを主張するものではありません。高日射地域では、この垂直円筒形フォーマットの現実的な晴天時出力は、おおよそ0.8 to 1.1 kW DC peakで、通常は正午ではなく午前中頃または午後にピークを迎え、1日あたり約6 to 9 kWhです。高出力のドローンおよびロボットタスクは、5 to 20 kWh-classの蓄電によりバッファされ、デューティサイクルに基づいてスケジュールされます。
このエネルギー設計は旧市街の運用にとって重要です。有用な監視ポイントの多くは、電源を確保しやすい場所ではないためです。各横断断面に電源を引く場合、承認、現地工事、保守インターフェースが追加で必要になります。Sky Hubは、規律あるデューティサイクル計画を引き続き必要としながらも、送電網、都市電源、現地電源への依存を回避します。
各ノードでは、ポール上の共通運用状況ビューに、センシング、認可済み評価と対応、エッジコンピュートのスケジューリング、現場運用および保守から成る運用ループが提示されます。これにより、センシング、確認、対応計画、調整を1つのループとして捉える中国式の運用思想を支援しつつ、意思決定経路に人による承認を維持します。
3. エッジコンピュートのワークフロー:メタデータがポール外へ出る前のローカル処理
このマスカット向け構成における中核モジュールの焦点はエッジコンピュートです。OrinまたはThorクラスの性能帯にあるJetson-classエッジモジュールが、ポール内部でローカル推論、イベントスコアリング、ワークロードスケジューリングを実行します。生の映像およびセンサーストリームはポール上に保持され、ローカルで処理されます。運用ポリシーに従い、匿名化済みイベントメタデータ、ステータスメタデータ、ログ、承認済み証拠パッケージのみがノード外へ出る場合があります。
エコ環境関係者にとって、これは証拠収集ワークフローを変えます。連続的な生映像を中央で収集し後からレビューするのではなく、ポールがエッジで運用上関連性のあるイベントを分類します。対象には、匿名の車両カウント、群衆密度の変化、侵入または境界認識、異常な騒音傾向、粉じん変化、風向変化、照度変化、ドローンまたはロボット運用のミッションステータスが含まれます。このシステムは設計上、PDPL/LGPDを意識しており、ローカル処理とデータ最小化を前提に設計されています。これは認証取得済み、または規制遵守が既に検証済みであるという主張ではありません。
夜間巡回シナリオは、PTZカメラが河川横断断面のアクセス経路付近で活動を検知し、同時に環境センサーが騒音および粒子状物質の上昇を示すところから始まる場合があります。エッジモジュールはイベントをスコアリングし、PTZがその場面を保持するようスケジュールし、共通運用状況ビューに匿名化済みアラートを表示します。人間のオペレーターは、上空からの確認のためのドローン出動、または許可されたルートに沿ったより近距離の観察のための地上ロボット派遣を承認できます。
目的は、自動化で説明責任を置き換えることではありません。目的は、最初の証拠パッケージをより一貫したものにすることです。これには、時刻、ノードステータス、環境測定値、センサースナップショット、ミッション判断、オペレーター承認、ドローンまたはロボットのタスクログ、クローズ記録が含まれます。これにより、回避可能な夜間巡回の反復が減り、レビュー品質の向上を支援します。
4. 夜間巡回運用:ドローン、ロボット、C-UASの連携
休暇期間中の夜間巡回では、Sky Hubはロボット対応かつドローン対応のエッジノードとして構成されます。ドローン運用には、ポールにオペレーターを配置せずに自律出動を行うための発進、地域巡回、点検、帰還、タスク再配置が含まれます。マルチベイ式バッテリーマガジンは、着陸後に自動後方サービスのバッテリー交換を実行し、ドローンが充電済みパックを受け取って再発進できるようにします。複数のベイにより、運用計画内で複数回の連続出動を支援します。
ドローン運用管理は、ルート計画、充電および交換状態の管理、タスクキューイング、フリート健全性、ミッションログを通じて行われます。エッジモジュールは、環境センシング、カメラ分析、ドローンタスク、ロボットタスクが電力またはコンピュートを無秩序に奪い合わないよう、ワークロードをスケジュールします。
地上ロボット運用は、近距離証拠のための第二層を追加します。ヒューマノイドまたはサービスロボットは、自律巡回、アラーム対応、点検、空地連携を実行し、ワイヤレス充電のためにポール基部へ帰還できます。旧市街環境では、ドローン視点だけでは不十分であり、低視認性エリアへ直ちにチームを派遣せずにルートレベルの観察が必要な場合に有用です。
Counter-UAS連携は慎重に扱われます。ポールは、ローカルセンシングおよび承認済みの任意のパートナーセンサー入力を用いて、無許可ドローンを検知・追跡します。レーダーはポールに内蔵されていません。任意またはパートナーセンサー入力としてのみ検討される場合があります。人による承認後、ノードは自らの友軍ドローンに対し、ソフトな空中ネット捕獲または近接接近による抑止を実行するよう指示できます。軽減策は非致死的かつ人による承認を伴い、自律攻撃は行いません。
5. 評価フレームワーク:主張された結果ではなく、Opex重視の計画
マスカットパイロットのOpexの枠組みは、運用労力、巡回の反復、証拠レビュー作業量、現場派遣の規律に関するものです。本報告書は、達成済みの性能、検知率、カバー範囲、顧客承認、認証、または展開規模を主張するものではありません。購入者がエンジニアリング、許認可、運用設計の過程で調整できる計画上の前提を提示します。
エコ環境チームは、現在の夜間巡回慣行とノード支援型ワークフローを比較して評価すべきです。有用な指標には、どれだけの定型巡回パスを自動化できるか、どれだけの環境アラートが初回レビューで十分な証拠をもってクローズされるか、ドローンまたはロボットが十分な文脈を収集したために人の派遣がどれだけ回避されるか、匿名化済みイベント記録がどれほど一貫して生成されるかが含まれます。
システムは完全オフグリッドであるため、評価にはエネルギー規律も含める必要があります。日次の太陽光補充、蓄電予備量、ドローン出動のデューティサイクル、ロボット巡回のデューティサイクル、太陽光出力に影響する天候または粉じん条件です。360-degree CIGSラップは全方向の受光性を改善しますが、任意の時点での実出力は太陽に向いた投影面によって左右されます。購入者は、太陽光をバッテリー支援型マイクロステーションへの補助的な補充と捉えるべきであり、すべての高出力モジュールを連続稼働させる許可と見なすべきではありません。
信頼できるマスカット評価は、運用上の意思決定で完結します。すなわち、どの横断断面ポイントが恒久的なノードサービスに値するか、どの巡回タスクを手動のまま残すか、どのイベントタイプで人によるエスカレーションが必要か、生映像をポール外へ移動せずにエコ環境証拠収集に十分なメタデータ項目は何かを判断することです。
システム構成
| 項目 | 構成 |
|---|---|
| ポール形態 | SOLARTODO Sentinel Sky Hub PUREスマートポール、照明を持たないcity-ai-poleエッジノード |
| エネルギーシステム | 360-degreeフレキシブルCIGS太陽光補充を備えた、完全オフグリッドのバッテリー支援型マイクロステーション |
| エッジAIコンピュート | ローカルイベントスコアリング、ワークロードスケジューリング、ミッションログ用のポール搭載Jetson-class推論キャビネット |
| セキュリティセンシング | 匿名の車両カウント、群衆密度、侵入、境界認識のためのAI PTZカメラ |
| 環境モニタリング | 風速、風向、温度、湿度、大気圧、騒音、PM10、PM2.5、照度 |
| ドローンおよびロボット運用 | 自律ドローン発進とバッテリーホットスワップに加え、地上ロボット巡回およびポール基部でのワイヤレス充電 |
| データ処理 | 生映像およびセンサーデータはポール上で処理され、匿名化済みイベントメタデータとステータスメタデータのみがノード外へ出る場合があります |
仕組み
- ポール搭載PTZと環境センサーが、河川横断断面ポイントで夜間の異常をフラグします。
- エッジAIがイベントをローカルで分類し、優先度をスコアリングし、生映像およびセンサーストリームをポール上に保持します。
- 人間のオペレーターが共通運用状況ビューで匿名化済みアラートを確認し、対応を承認します。
- ポールが、バッテリー予備量とルート許可に従い、ドローン出動、地上ロボット巡回、またはその両方をスケジュールします。
- ミッションログ、環境測定値、匿名化済みイベントメタデータがレビュー用の証拠パッケージにまとめられます。
- オペレーターがイベントをクローズ、エスカレーション、または再タスク化し、ノードが保守およびエネルギーステータスを更新します。
計画前提(参考値)
購入者が再計算できる例示的な計画入力値であり、達成済みの結果ではなく目標指標です。最終的なエンジニアリング確認が前提です。
| 指標 | 計画前提 | 参考値 |
|---|---|---|
| 点検作業人員 | 選定された河川横断断面ポイントにおいて、ドローン巡回が定型的な手動夜間巡回パスを代替する | 週あたり約10 to 20回の巡回パスを自動化 |
| 証拠レビュー | エッジAIが連続センシングを、オペレーター確認用の匿名化済みイベントパッケージにフィルタリングする | 週あたり約30 to 60件のイベントパッケージをレビュー |
| 現場派遣の規律 | ロボットまたはドローンの初動確認ミッションが、現場チーム派遣前に文脈を提供する | 週あたり約5 to 15件の初動確認ミッション |
| エネルギーデューティサイクル | 高出力のドローンおよびロボットタスクは、バッテリー予備量と日次の太陽光補充に照らしてスケジュールされる | 太陽光計画入力として1日あたり約6 to 9 kWh |
| 休暇期間の増加対応 | 各ポールに現地オペレーターを追加せず、休暇期間中に夜間巡回タスクキューを増やす | 夜あたり約2 to 3回の優先時間帯 |
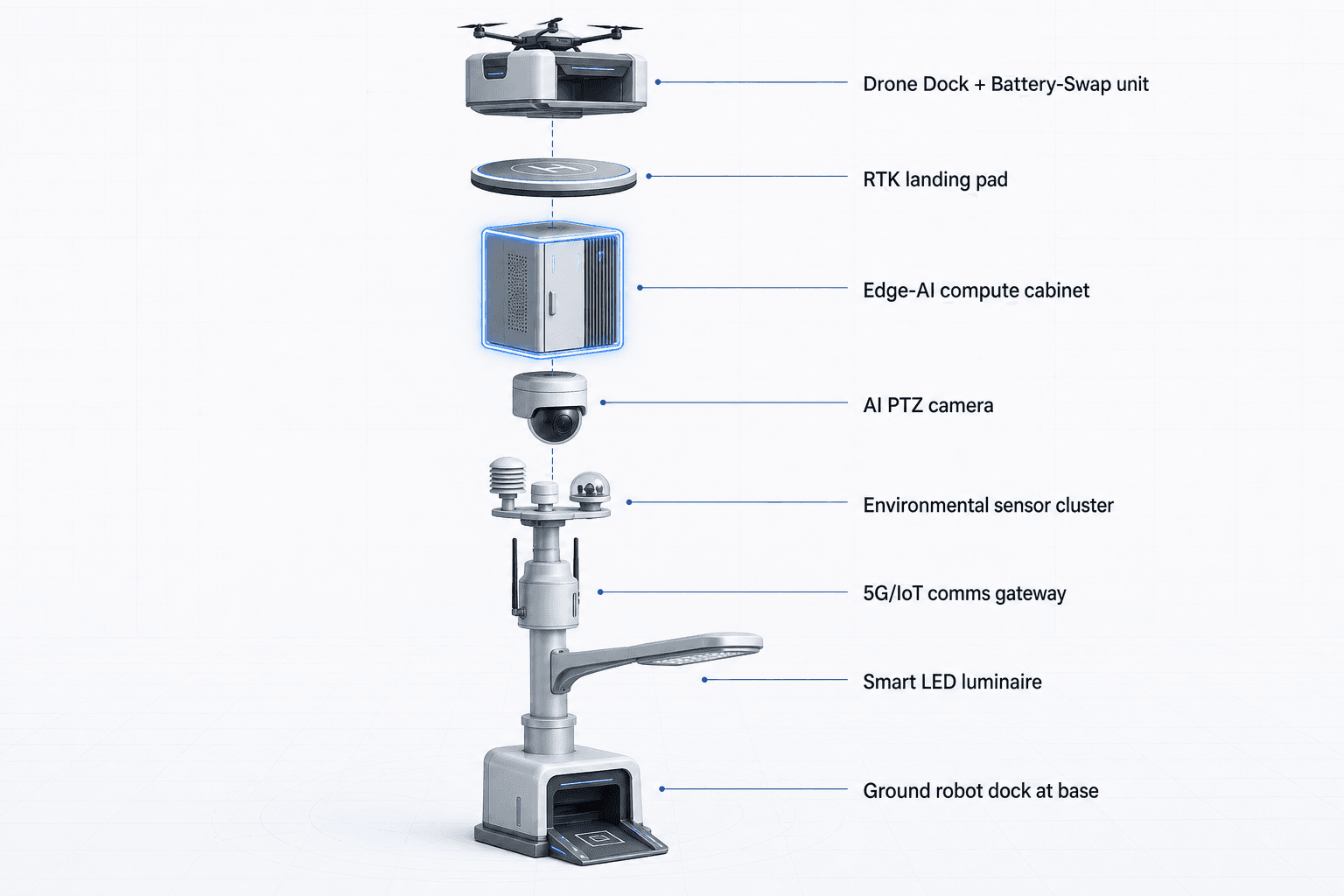
導入機器
- SOLARTODO Sentinel Sky Hub照明なしポール本体
- フレキシブルCIGS太陽光ラップおよびバッテリー貯蔵キャビネット
- ポール搭載エッジAIコンピュートモジュール
- AI PTZカメラアセンブリ
- 9パラメータ環境センサースイート
- マルチベイ式バッテリーホットスワップマガジンを備えた自律ドローンベイ
- 地上ロボット用ワイヤレス充電インターフェース
- OTATODO edge OS共通運用状況コンソール
よくある質問
SOLARTODO Sentinel Sky Hubはスマート街路灯ですか?
いいえ。Sky Hubは照明システムを持たないPUREスマートポールです。このマスカット向け構成では、センシング、エッジコンピューティング、ドローン運用、地上ロボット運用、証拠ワークフロー調整のためのcity-ai-poleおよび物理AI都市型エッジノードとして扱われます。照明資産として仕様化したり、街路照明の代替として調達したりすべきではありません。
完全オフグリッドのエネルギー設計はマスカットの条件でどのように機能しますか?
ポールは、バッテリー貯蔵と約15 square metersの360-degree巻き付け型フレキシブルCIGS薄膜太陽光補充を組み合わせます。この垂直円筒形形状では、現実的な晴天時出力は、高日射条件下でおおよそ0.8 to 1.1 kW DC peak、1日あたり約6 to 9 kWhとして計画されます。ドローンおよびロボットタスクには、それでも蓄電予備量に対するデューティサイクルのスケジューリングが必要です。
エコ環境の夜間巡回イベント中に、どのデータがポール外へ出ますか?
意図されたデータ処理パターンは、まずローカル処理です。生映像およびセンサーストリームはポール上に保持され、そこでエッジAIが推論、イベントスコアリング、証拠パッケージ化を実行します。購入者の運用ポリシーおよび最終的な法務レビューに従い、匿名化済みイベントメタデータ、ステータスメタデータ、ミッションログ、承認済み証拠サマリーのみがノード外へ出る場合があります。
各ノードにオペレーターを配置せずに、休暇期間の需要増に対応できますか?
はい。提案構成は、遠隔からの人による承認を伴う無人ノード運用向けに設計されています。休暇期間中、タスクキューは河川横断断面の巡回、環境異常確認、ドローンによる初動確認ミッション、地上ロボットのフォローアップを優先できます。人間のオペレーターは、共通運用状況ビューを通じて承認、エスカレーション、クローズ判断の責任を引き続き担います。
証拠収集におけるエッジコンピュートの役割は何ですか?
エッジコンピュートは、初回レビューのために連続的な生データを中央システムへ移動する必要性を減らします。ポール搭載モジュールはローカルイベントを分類し、カメラ、ドローン、ロボットのワークロードをスケジュールし、匿名化済み証拠パッケージを生成します。これにより、機微な生ストリームをノードに留めながら、エコ環境チームにとってより一貫した記録を支援します。
この構成ではCounter-UAS連携はどのように扱われますか?
ポールは、自らのセンシングおよび承認済みの任意のパートナーセンサー入力を通じて、無許可ドローンを検知・追跡できます。レーダーはポールに内蔵されていません。いかなる軽減措置も人による承認を伴い、非致死的です。たとえば、定義された運用ルールの下で、友軍ドローンにソフトな空中ネット捕獲または近接接近による抑止を実行させることが含まれます。
パイロット構成から恒久サービスへ移行する前に、購入者は何を評価すべきですか?
購入者は、横断断面サイトの適合性、飛行許可、ロボットルートの安全性、通信計画、太陽光曝露、蓄電予備量、環境センサー較正、証拠保持ポリシー、人による承認ワークフローを確認すべきです。最も重要な評価項目は、不要な生データ移動を生じさせずに、ノードが巡回の一貫性と証拠品質を改善するかどうかです。
さらに詳しく
街路・キャンパス・公共空間で同様のフィジカルAI導入をご検討ですか? エンジニアリング相談を依頼する