
City AI Pole、本ケースでは SOLARTODO Sentinel は、センシング、ポール上での推論、ドローンドッキング、地上ロボットドッキング、ハイブリッド電源オプションを1つの都市アセットに統合したフィジカルAI エッジノードポールです。ナイロビで提案される導入は、激甚気象による混乱後の工業団地外周監視を支援し、エコ環境チームが巡回、証拠取得、カバレッジ評価を調整できるようにします。
調達背景
本ナイロビ提案ケースは、激甚気象、洪水、がれきの移動、ユーティリティ中断、一時的なアクセス制約の後に、より迅速な外周復旧を必要とする工業団地キャンパス向けの調達評価として位置づけられています。想定される購入者はエコ環境ステークホルダーグループです。具体的には、排水路、構内道路、荷積みエリア、緑地バッファ、燃料取扱区域、境界フェンス周辺の状況を記録する必要がある、現場環境管理者、カウンティ対応のコンプライアンスチーム、安全担当者、施設運営者です。
季節的な契機は台風シーズンへの備えですが、ナイロビについては慎重に扱う必要があります。ナイロビ自体は台風帯にはありません。この調達ケースでは、この表現は多国籍テナントや物流チームが市場横断で激甚気象時の事業継続計画を同期するために採用する地域レジリエンスカレンダーとして使用されています。現地での工学的な懸念は、豪雨、風、流出水、滞水、暴風雨被害、強い気象事象の後に生じ得るアクセス途絶です。導入モードは災害後の補完配置です。既存の照明ポールやカメラを一度にすべて置き換えるのではなく、混乱によってキャンパス外周の死角が明らかになった後、優先度の高いギャップに Sentinel ポールを追加します。
中核的な課題は部門間のサイロ化です。環境チームは点検ログを保有し、警備チームは映像を保有し、施設チームは巡回スケジュールを管理し、運用チームが最初にインシデント通報を受けることがあります。復旧期間中、この分断は意思決定を遅らせます。したがって調達目的は、ドローン、ロボット、カメラを個別機器として購入することではありません。最終的な工学的確認を前提に、共有された外周証拠レイヤーを構築できる統合型都市エッジノードポールを評価することです。
現場シナリオ
シナリオは、倉庫、軽工業、物流、駐車場、サービスヤード活動が混在するナイロビの工業団地を囲むキャンパス外周ルートです。最も重要な境界は、公共向けのゲートだけではありません。裏側の排水回廊、非公式な歩行者動線に隣接するフェンスライン、一時的な請負業者アクセス地点、ユーティリティキャビネット、暗渠、廃棄物取扱コーナー、工業区画と近隣道路または集落の間のバッファゾーンも含まれます。
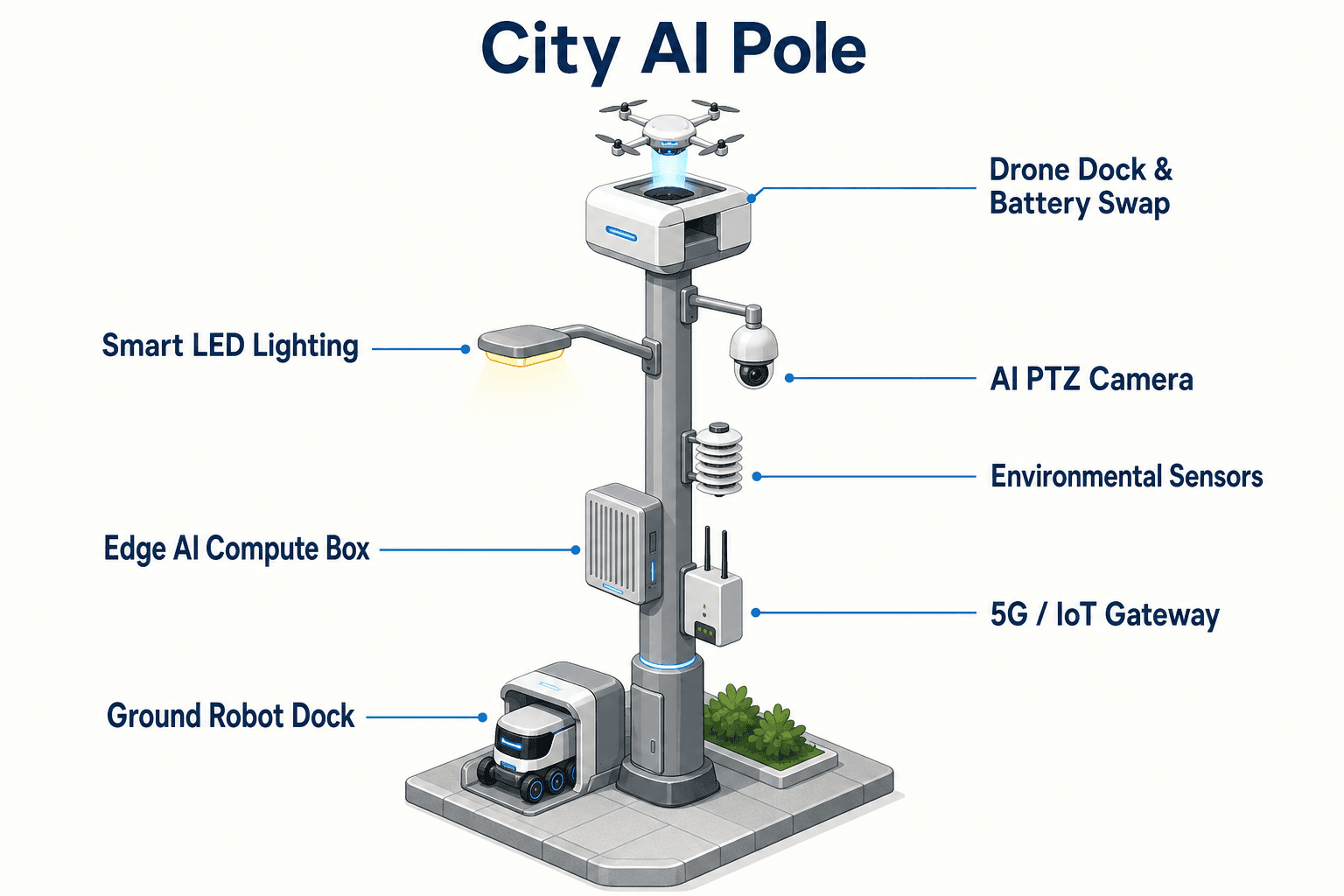
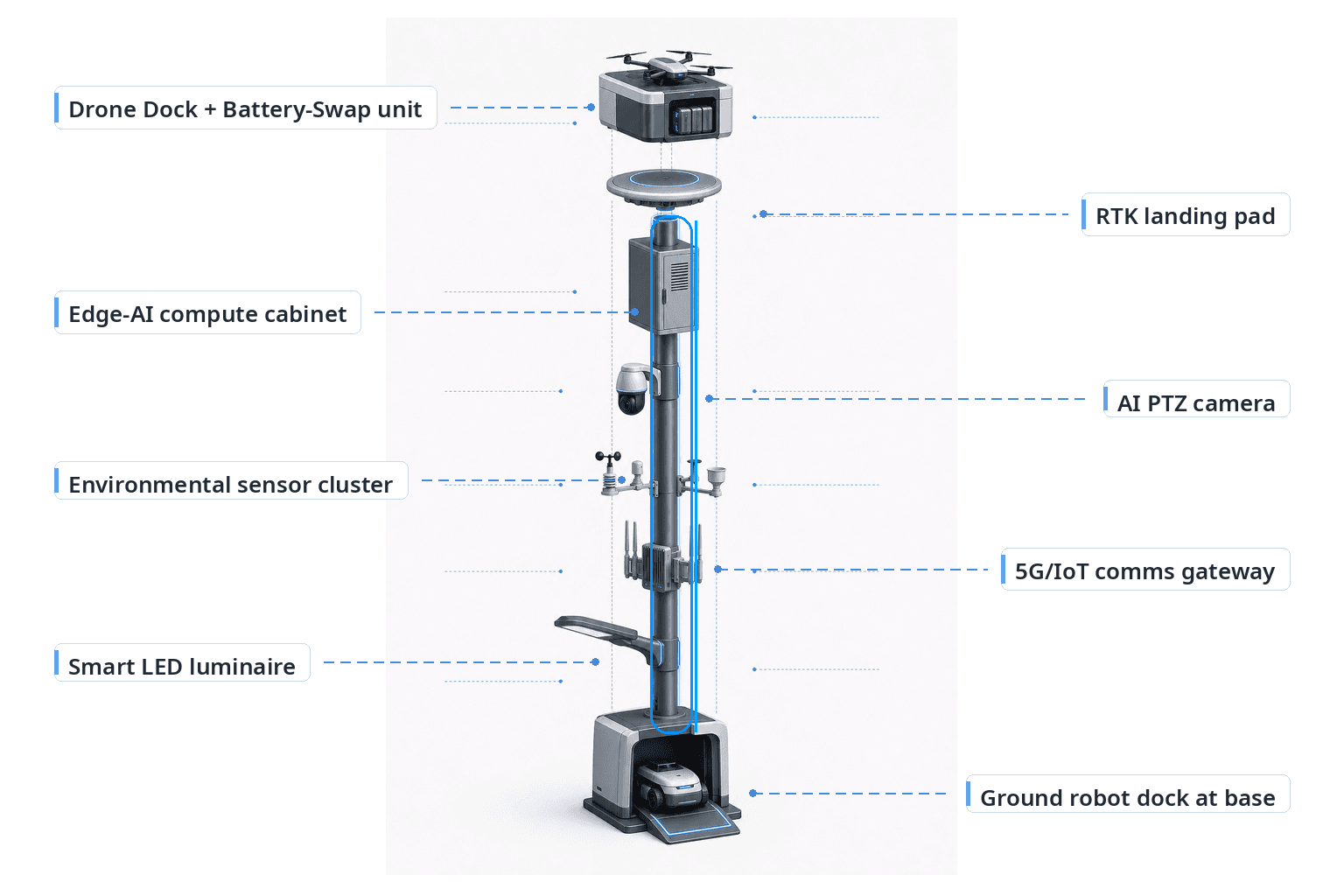
激甚気象イベント後、手作業による点検はしばしば断片化します。警備はアクセス制御に集中し、環境スタッフは流出水や漏出リスクに集中し、施設クルーは詰まった排水設備や損傷した照明を優先する場合があります。提案される SOLARTODO Sentinel の配置は、同じ物理地点から観測、巡回、記録を行えるポールにより、選定されたギャップを補完します。Sentinel ポールは、ブラッシュドメタルの本体、ミッドナイトブルーの太陽光発電ミッドセクション、シアンのLEDアクセントリング、クラムシェル屋根付きの白い SOLARTODO ドローンドック、基部の地上ユニットドッキング位置を備えています。B2B導入では、このアセットが工業団地のレジリエンスシステムの一部として、警備員、保守チーム、テナント、訪問請負業者に認識される必要があるため、視覚的アイデンティティは重要です。
このユースケースでは、地上ロボットがモジュールの重点です。汎用の四足歩行または車輪式巡回ロボットが自動充電のためにポール基部にドッキングし、トラック、積み上げ資材、植生、一時フェンス、滞水によって固定カメラの視界が遮られるエリアを点検するよう割り当てられます。ドローンは上空確認とルート確認のために統合ポールの一部であり続けますが、この調達ケースでは地上レベルの証拠を重視します。対象は、フェンスの健全性、排水設備に押し寄せたがれき、アクセス障害、重要保管場所付近の水たまり、高所設置カメラでは捉えられない可能性のある近距離の状態記録です。
提案構成
提案される Sentinel 構成は、工学的確認を前提とするカスタムプロジェクト設計です。このポールは、単独のドローンシステムや単独の巡回ロボットではなく、1つの都市エッジノードとして扱われます。各ノードは、ポール本体、センシング、デバイス上推論、ドローンドック、地上ロボットドック、電源経路、ローカル証拠ワークフローを統合します。
上部では、白い SOLARTODO ドックとクラムシェル屋根が、ミッション間の汎用クアッドコプターを保護します。ドローンは、精密RTK着陸パッドとバッテリー・ホットスワップマガジンを使用し、指定された交換時間に依存せずに、迅速な自動バッテリー交換によってダウンタイムを低減します。ドローンは、ルート全体の把握、屋根線確認、アクセス困難な境界の検証のために離陸できますが、統合ポール導入の一部であり続けます。
基部では、巡回ロボットがドッキングして自動充電します。この地上ユニットはキャンパス外周シナリオを中心に構成されます。短い点検ループ、低速での近接観察、タスク完了時またはシステムが可用性を維持する必要がある場合のドック帰還動作です。エコ環境の購入者にとって、ロボットの価値は反復可能な状態取得にあります。各気象イベント後に同じ点検経路をたどることで、排水設備、土壌の乱れ、廃棄物エリア、境界植生、低位置のアクセス地点について、チームが比較可能な記録を得られます。
ポールキャビネットには、換気筐体内に組み込み型エッジAIアクセラレータが収容されています。システムは、すべてのイベントでクラウドへの往復通信を必要とせず、低遅延の判断のためにデバイス上推論を実行します。PTZカメラ、気象・環境センサーパッケージ、オプションの4D radar / LiDARが検知レイヤーを支援します。電源は、現場負荷、日陰、ユーティリティ可用性、最終的な工学的検証に応じて、系統接続または風力・太陽光ハイブリッドとなります。
カバレッジKPI
この調達ケースにおけるKPIの枠組みはカバレッジです。カバレッジは、優先外周チェックポイント、点検経路、イベント記録のうち、固定ポールセンサーで観測できる、地上ロボットが到達できる、または状況により上空視点が必要な場合にドローンで確認できる計画上の割合として定義されます。これは評価指標であり、達成済み成果の主張ではありません。
ナイロビの工業団地では、単純な地図上の半径ではなく、運用上の現実に基づいてカバレッジを計画すべきです。排水保全区域に沿った長い境界は、内部サービス道路に面した見通しのよい壁よりも頻繁な地上点検が必要な場合があります。警備員がいるゲートはすでに人の視認性がある一方、裏側の暗渠は豪雨後にセンサー確認が必要になる場合があります。荷積みヤードは日中にはPTZカメラから見える一方、夜間には駐車中のトレーラーや一時資材により視覚的に複雑になることがあります。Sentinel ノードは、これらの違いを各部門が共同で評価できるカバレッジ計画に変換する方法として提案されています。
部門間のサイロ問題は、1つの検知・判断・実行・記録ループを使用することで対処されます。環境チームは点検優先順位を定義し、警備チームは外周異常を検証し、施設チームは保守証拠を受け取り、運用チームは継続状況を確認します。地上ロボットは、特に固定カメラが一部遮られる場所や、災害後のがれきにより現場レイアウトが変化する場所で、低位置でのポール点検到達範囲を拡張することにより、カバレッジKPIを改善します。
調達時には、購入者は最終設計前に、目標チェックポイント、巡回時間帯、例外カテゴリ、データ保持ルール、エスカレーション役割を設定すべきです。その後、工学的確認により、ポール配置、ロボット経路の安全性、ドローン離陸制約、無線または有線バックホール、電源レジリエンス、設置許可、環境曝露を検証する必要があります。
調達プロセス
信頼性のある調達プロセスは、共同の外周調査から始まります。現場チームは、既知の災害後ギャップをマークします。浸水しやすい角、損傷したフェンス区間、流出水経路、暗所、交通競合エリア、手作業の巡回報告が遅れたり不完全になったりしやすい場所です。次にエコ環境ステークホルダーは、技術の好みではなく点検上の重要度に基づいて、これらのギャップをランク付けします。
第2ステップは、ノード構成ワークショップです。SOLARTODO Sentinel は、必要なセンサーミックス、組み込み型エッジAIアクセラレータ、ドローンドック、地上ロボットドック、電源モードを備えた完全なフィジカルAIポールとして仕様化されるべきです。このケースの価値は外周での協調的な証拠取得に依存するため、明確な統合計画がない限り、購入者は要件を個別デバイスのロットに分断することを避けるべきです。
第3ステップは、評価プロトコルです。設置前に各部門は、どのようにカバレッジをテストするかについて合意します。どのチェックポイントを対象にするか、どの巡回ループを範囲に含めるか、何を例外とするか、誰がロボットまたはカメラの発見事項をレビューするか、社内の環境ガバナンスのためにどの記録を保持する必要があるかです。これにより、導入が1つの部門だけが所有する新たなサイロになることを防ぎます。
最終ステップは工学的確認です。ナイロビの現場条件は、排水、粉じん、アクセス制御、道路形状、無線環境、日陰、テナント活動、ユーティリティ安定性によって大きく異なる可能性があります。したがって、提案される導入は、土木、電気、安全、空域、通信、運用手順が確認されるまでは、例示的な調達ケースとして扱うべきです。期待される価値は定性的かつ運用上のものです。共有可視性の向上、災害後点検の一貫性向上、外周カバレッジを評価するためのより明確な方法です。
システム構成
| 項目 | 構成 |
|---|---|
| ポール形状 | ミッドナイトブルーの太陽光発電ミッドセクションとシアンのLEDアクセントリングを備えた、スリムな円筒形/八角形のブラッシュドメタルポール |
| エッジAIコンピュート | デバイス上推論と低遅延のローカル判断のための組み込み型エッジAIアクセラレータを備えた、ポール上の換気キャビネット |
| ドローンユニット | クラムシェル屋根、汎用クアッドコプター、精密RTK着陸パッド、バッテリー・ホットスワップマガジンを備えた白い SOLARTODO ドック/ネスト |
| 地上ユニット | 外周点検ループのためにポール基部にドッキングし、自動充電に対応する汎用四足歩行または車輪式巡回ロボット |
| センシング | 選定された外周条件向けのPTZカメラ、気象/環境センサー、オプションの4D radar / LiDAR |
| 電源 | 現場負荷と工学的確認を前提とする、系統接続または風力・太陽光ハイブリッド構成 |
仕組み
- ポール上のPTZカメラまたは環境センサーが外周異常を検出する。
- 組み込み型エッジAIアクセラレータがイベントをローカルで分類し、レビュー優先度を割り当てる。
- 地上ロボットが基部ドックを離れ、近距離でチェックポイントを点検する。
- ドローンは、アクセス、屋根線、またはルート状況について上空からの検証が必要な場合にのみ離陸する。
- ノードは、エコ環境、警備、施設、運用レビューのために同期された証拠を記録する。
- チームがイベントをクローズし、カバレッジマップを更新し、次回の巡回計画を調整する。
計画前提(参考値)
購入者が再計算できる例示的な計画入力値であり、達成済みの結果ではなく目標指標です。最終的なエンジニアリング確認が前提です。
| 指標 | 計画前提 | 参考値 |
|---|---|---|
| 点検カバレッジ | 導入前に優先チェックポイントをマッピングし、固定カメラ、地上ロボット、またはドローン検証に割り当てる | キャンパスフェーズごとに約20-40チェックポイントを計画 |
| 地上巡回頻度 | 地上ロボットは、激甚気象イベント後および復旧シフト中に、反復可能な外周ループを実行するようスケジュールされる | 稼働日あたり約3-6巡回ループ |
| 手動エスカレーション負荷 | エッジレビューとローカル証拠取得の後、分類された例外のみを人間のチームへエスカレーションする | 約5-10の例外カテゴリを定義 |
| 証拠の一貫性 | 各部門が、環境、警備、施設レビューのための共通記録フィールドに合意する | ノードごとに約1つの共有イベントログ |
| 災害後補完配置の優先度 | 初期ポール配置は、過去のアクセス途絶、洪水曝露、または外周死角によって実証されたギャップに重点を置く | 導入順序付けのために約3つの優先階層 |
導入機器
- 太陽光発電ミッドセクションを備えた SOLARTODO Sentinel スマートポール本体
- クラムシェル屋根付きの白い SOLARTODO ドローンドック/ネスト
- RTK着陸支援付き汎用クアッドコプター
- ドローン運用向けバッテリー・ホットスワップマガジン
- 基部自動充電ドック付き地上巡回ロボット
- PTZカメラおよび気象/環境センサーパッケージ
- 組み込み型エッジAIアクセラレータを備えた換気エッジAIキャビネット
- オプションの4D radar / LiDARモジュール
よくある質問
これはドローンプロジェクトですか、それともロボットプロジェクトですか?
いいえ。この調達ケースは、統合型都市エッジノードポールとしての SOLARTODO Sentinel を対象としています。ドローンと地上ロボットはポールシステムのモジュールであり、ポール上のセンシング、エッジ推論、ドッキング、電源、証拠ワークフローによって支えられます。ナイロビのシナリオでは、激甚気象後のキャンパス外周条件に近距離点検が必要になることが多いため、地上ロボットを重視しています。
なぜ購入者をエコ環境ステークホルダーとして位置づけているのですか?
対象課題はセキュリティ侵入だけではありません。ナイロビの工業団地運営者は、混乱を伴う気象後に、流出水、詰まった排水設備、廃棄物エリアの状態、フェンスラインの乱れ、環境例外も記録する必要があります。エコ環境ステークホルダーは、共有証拠ループを使用して、個別の現場記録を維持することなく、警備、施設、運用と連携できます。
この導入は部門間のサイロ化にどのように対処しますか?
提案されるワークフローは、検知から点検、クローズまで1つの運用記録を作成します。カメラまたはセンサーがイベントを検出し、エッジAIがローカルで分類し、地上ロボットが近距離の証拠を収集し、各部門が同じイベント記録をレビューします。この構造により、個別の巡回メモ、映像クリップ、保守観察が分断されたシステムに散逸することを防ぎやすくなります。
このケースにおける災害後の補完配置とは何を意味しますか?
災害後の補完配置とは、既存インフラの一律置換を前提とするのではなく、混乱によって明らかになった外周ギャップに Sentinel ポールを提案することを意味します。購入者はまず、死角、遮断されたアクセスルート、排水曝露、点検遅延を特定し、その後、目標カバレッジを改善できる場所にノードを配置します。最終配置は引き続き工学的確認の対象です。
調達時にカバレッジはどのように評価すべきですか?
カバレッジは、チェックポイント、巡回経路、例外カテゴリ、証拠記録にまたがる計画指標として評価すべきです。購入者は、どの外周地点に固定観測が必要か、どこに地上ロボット点検が必要か、どこにドローン検証が必要かを定義できます。調達チームは数値を、達成済みの導入結果ではなく、テストすべき目標入力として扱うべきです。
ナイロビが台風帯にないのに、なぜ台風シーズンに言及するのですか?
このケースでは、台風シーズンはナイロビの局地的なサイクロン曝露を主張するものではなく、地域横断の事業運用における激甚気象への備えのための調達カレンダーとして使用されています。ナイロビの工学的根拠は、工業団地の継続性と環境点検に影響し得る豪雨、風、流出水、洪水、アクセス途絶、がれきの状況に重点を置くべきです。
さらに詳しく
街路・キャンパス・公共空間で同様のフィジカルAI導入をご検討ですか? エンジニアリング相談を依頼する