
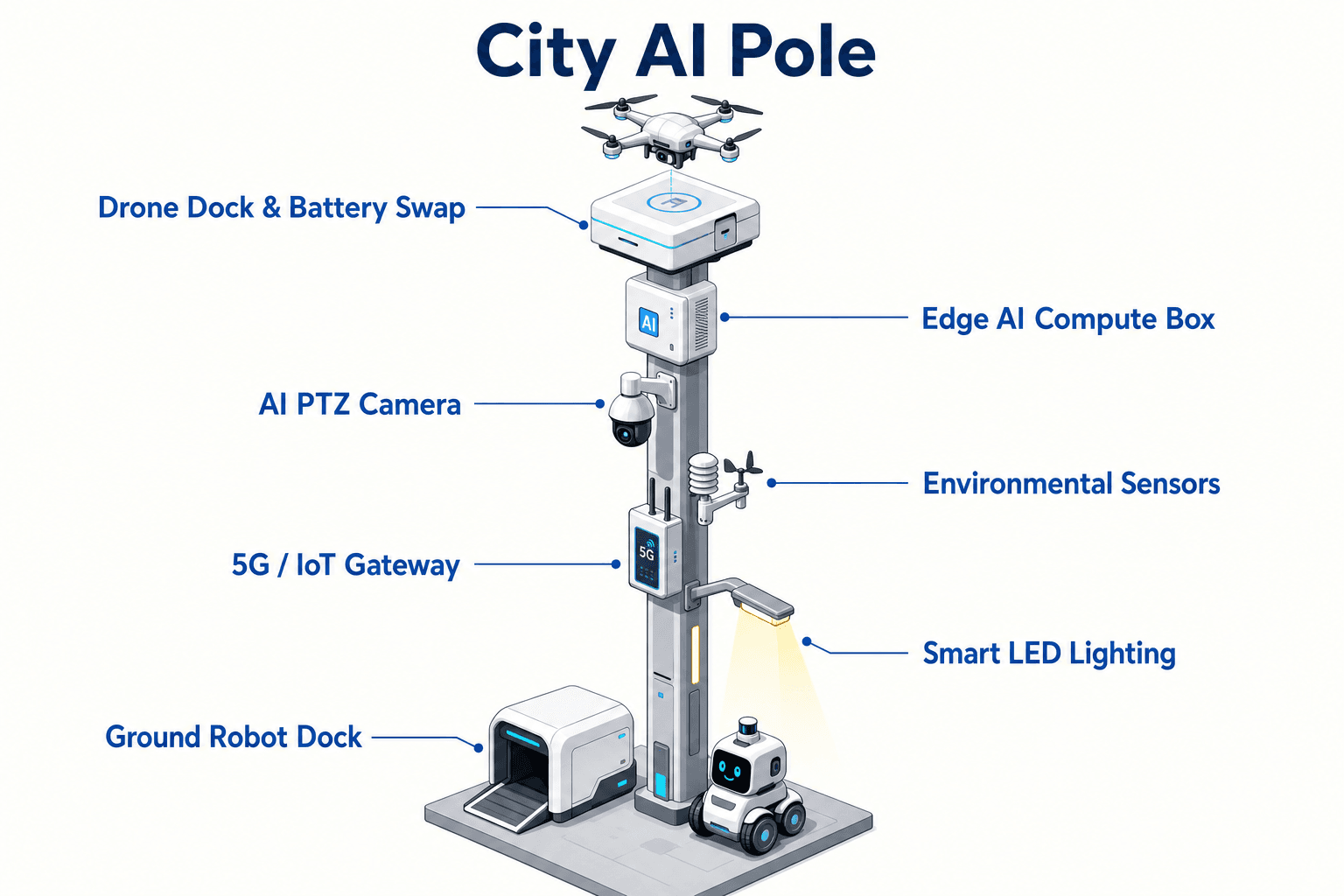
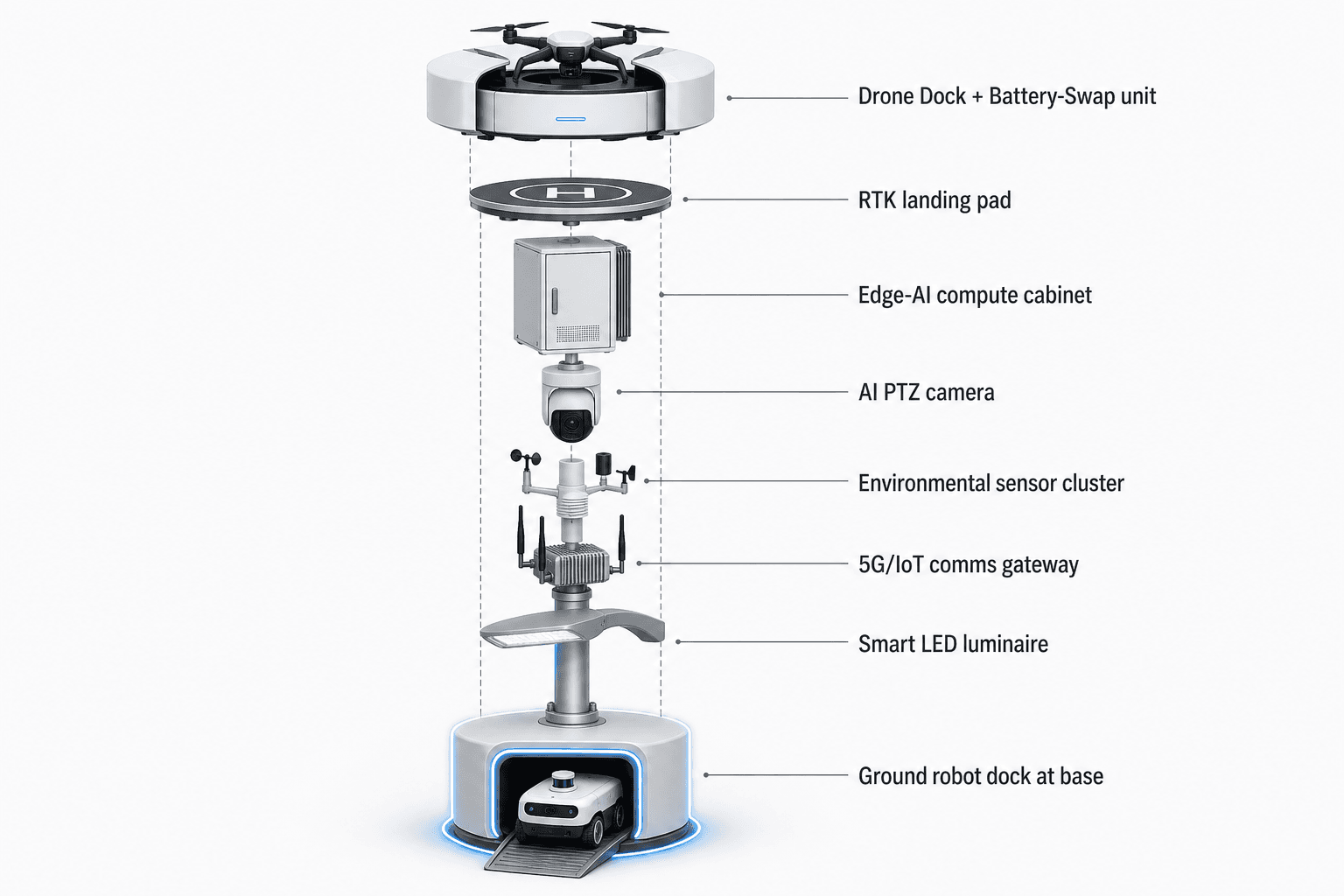
City AI Pole / Sentinel フィジカルAIエッジノードは、ローカルセンシング、ポール上AI推論、ドローンドック、ドッキング式巡回ロボット、電源オプションを1つの街路アセットに統合した、スリムな SOLARTODO スマートポールである。本提案のサンパウロ旧市街向け洪水制御導入では、ノードが河川横断部を監視し、ロボット点検をトリガーし、交通当局と証跡を共有することで、応答時間に関わる意思決定の短縮を支援する。
休日洪水制御ブリーフ
このサンパウロ導入案は、休日の移動需要と小売ピーク時における旧市街中心部向けの交通当局運用計画として位置付けられている。焦点は一般的なスマートシティのショーケースではない。強い雨が歩行者と車両の移動増加と重なった際に運用信頼性を失いやすい道路、バス進入路、橋梁ランプ、駅周辺、地下道隣接回廊を対象とした洪水制御ワークフローである。サンパウロの歴史的中心部と隣接する古い地区は、高架橋、運河化された水路、暗渠化された小河川、清掃が難しい縁石排水口によって形づくられた高密度の道路網の中にある。横断部付近で雨水が滞留した場合、交通当局にとって最初の運用上の問いは実務的である。乗客と作業員が回避可能な混乱にさらされる前に、車両を流し続けるのか、サービスを一時保持するのか、迂回させるのか、脆弱な進入路を閉鎖するのかを判断する必要がある。
提案される SOLARTODO Sentinel 構成は、最終的なエンジニアリング確認を前提としたカスタムの都市エッジノードポールであり、部門単独の機器ではなく共有証跡ポイントとして位置付けられる。各スリムな円筒形または八角形ポールは、ブラッシュドメタルの本体、ミッドナイトブルーの太陽光発電ミッドセクション、シアンのLEDアクセントリングを備える。ポールには、気象・環境センサー、PTZカメラ、組み込み型エッジAIアクセラレーター、ドローンドック、地上巡回ロボットが1つの街路アセットとして統合される。休日トリガーに関する運用上の前提は、複数部門が同じ嵐を別々の画面で監視している状況で、交通当局がより迅速に確信を得る必要があるというものだ。気象センサーが最初のローカルトリガーとなり、ロボットが現場確認者となり、応答時間KPIが交通、排水、防災、イベント運用チーム間の共通指標となる。
河川横断部の導入パターン
導入モードは河川横断部であり、提案される各ノードは、リスクの垂直方向の運用スライスを中心に計画される。具体的には、河岸端、水路または河川、橋梁または暗渠インターフェース、進入道路、バス停ゾーン、歩行者通路、縁石排水口、ロボット巡回の帰還ルートである。サンパウロでは、このパターンは Tietê、Pinheiros、Tamanduateí、および旧市街のモビリティネットワークに影響する小規模な運河化または覆蓋された水路の影響を受ける回廊で有効である。本計画は、ポールの固定数量や定義済みのカバレッジエリアを前提としない。最終的な間隔、設置ポイント、電源設計、許認可は、土木、電気、排水、交通のエンジニアリングレビューによって確認される。
このような横断部に設置される Sentinel ポールは、ローカルの気象・環境条件を読み取り、デバイス上で推論を実行し、クラウドラウンドトリップを待たずに現場確認を開始するよう構成される。PTZカメラは、運用センターに対して、水の滞留、排水点の詰まり、交通挙動、歩行者の曝露状況を確認するための指向性ビューを提供する。視界、形状、または交通の動きによりカメラのみの評価が不十分な場所では、現地調査を前提として、オプションの4DレーダーまたはLiDARを評価できる。上部に搭載された白色の SOLARTODO ドローンドック/ネストは、クラムシェルルーフを備え、横断部と近接する進入路の短時間空中確認に使用する汎用クアッドコプターを支援する。高精度RTK着陸パッドと自動バッテリーホットスワップマガジンは、固定の交換時間を主張することなく、ダウンタイムの最小化に使用される。
ベース部に搭載された巡回ロボットは、この旧市街向け計画の中心である。狭い街路、影になった地下道、縁石沿いのゾーンでは、雨水深や堆積物を1つのカメラ角度から評価することが難しい場合があるため、ドッキング式ロボットがより近距離の確認を提供する。四足歩行型または車輪型のフォームファクターは、ルート点検、路面確認、安全評価の後に選定される。
気象センサーからロボットタスクへ
モジュールの焦点は気象センサーだが、運用上の価値は、それがどのようにロボットタスクを開始するかにある。提案ワークフローでは、気象・環境センサーは受動的なデータフィードとして扱われない。交通当局および連携部門が設定した洪水制御しきい値に紐づくローカルトリガーである。条件が警戒帯に近づくと、ポールに組み込まれたエッジAIアクセラレーターが、ローカルセンサー入力をカメラコンテキストおよび事前定義された運用ルールと相関させる。通常のトリアージはポール側で行われ、最初の分類ステップでは低遅延のデバイス上推論を用い、クラウドラウンドトリップを必要としない。
ローカルイベントがスコアリングされると、安全ルールとルート承認を前提として、巡回ロボットをポールベースから短距離点検ルートへ派遣できる。ロボットは、縁石排水口の詰まりを確認し、バスレーン端の滞水を観察し、許可された経路から橋梁進入部の下側を点検し、歩行者ルートがまだ通行可能かを確認できる。ロボットは自動充電のためにベースドックへ戻り、独立したロボットプログラムを作るのではなく、ポールを統合運用ポイントとして維持する。ドローンは、見通し、アクセス、安全条件から飛行が妥当と判断される場合に、上空コンテキストを提供する支援モジュールとして残る。
交通当局にとって、この違いは重要である。遠隔の気象アラートだけでは、サービス判断を促すには抽象的すぎる場合がある。現場からの通報だけでは遅れて届く可能性がある。カメラ画像だけでは、別システムを見ている他部門から異議が出ることがある。Sentinel ポールは、気象トリガー、エッジ分類、ロボット確認、PTZレビュー、任意の空中ビュー、共有イベント記録からなるローカル証跡ループとして提案される。この一連の流れは、最終的な行動判断を権限ある市職員に残しながら、ローカルリスク信号から運用判断までの時間短縮を目的として設計されている。
部門横断サイロの解消
中核的な課題は、部門横断で生じるサイロ化した行動である。大都市の洪水制御判断では、交通運用、排水保守、交通管制、防災、公共安全、衛生委託業者、イベント管理者が、何が起きているのかについて迅速に合意する必要がある。旧市街の休日期間では、回避可能な遅延がバス運行間隔、駅アクセス、タクシーおよびライドヘイリングゾーン、配送時間枠、緊急ルート、小売街近辺の群衆移動に影響し得るため、重要性が高まる。提案される Sentinel 導入は、これらの部門を置き換えるものとして提示されていない。特定の河川横断部から、タイムスタンプ付きの単一の証跡パケットを生成する現場ノードである。
交通当局は、各チームに自分たちのセンサー、カメラ、現場通報、チャットスレッドから開始させることなく、このパケットを用いて意思決定を調整できる。パケットには、気象センサートリガー、エッジAIイベント分類、地域ポリシーに応じたPTZスナップショットまたはクリップ、ロボット点検メモ、任意のドローンコンテキスト、オペレーター判断、フォローアップステータスを含めることができる。データガバナンス、保持、アクセス制御、当局システムとの統合は、エンジニアリングおよびポリシー設計の段階で規定される。
これが重要なのは、交通当局のKPIがセンサー量ではなく応答時間だからである。排水チームが降雨を把握し、交通スタッフが渋滞を把握し、現場監督者が水を把握するタイミングがそれぞれ異なる場合、共有すべき問いの形成が遅れる。提案されるポールは、1つの横断部と1つのインシデント記録に会話を固定することで、調整パターンを変える。気象センサーがイベントを開始するが、それを運用上具体化するのはロボットである。ロボットは、その問題が濡れた路面状態なのか、通路の閉塞なのか、上昇する水位ハザードなのか、別の対応者を必要とする排水障害なのかを確認できる。
応答時間評価計画
評価計画では、応答時間を達成済みの結果ではなく目標指標として扱う。導入前に、交通当局は、選定された河川横断部における休日洪水制御判断のベースラインプロセスを定義する。すなわち、現在アラートがどのように受信され、誰が検証し、誰が交通上の措置を承認し、その措置がどのように記録されるかである。その後、Sentinel 構成は、気象センサー、エッジ分類、ロボット派遣、オペレーター確認、現場対応、クローズメモのタイムスタンプを用いて、そのベースラインに対して評価される。目的は、統合ポールが意思決定経路を短縮し、確信度を高めるかどうかを、最終的なエンジニアリング確認を前提として測定することである。
特定の検知率、応答時間改善、導入数量、カバレッジエリアは主張しない。信頼性のあるパイロットは、計画上の前提、管理された運用ルール、明確に定義された休日監視期間から開始する。交通当局は、ルート区分、アラート重大度帯、ロボットの進入禁止条件、ドローン承認ルール、エスカレーション連絡先を事前定義する。各イベントについて、気象トリガーが意味のあるものだったか、ロボット確認が有用なコンテキストを加えたか、共有パケットが重複連絡を減らしたか、最終判断が明確に記録されたかをレビューする。
運用上の成功は、より良いテンポとより明確な説明責任として捉えられる。交通当局は、ローカル条件がいつ始まり、ポールがいつ分類し、ロボットがいつ確認し、責任チームがいつインシデントを受け入れ、回廊に関する判断がいつ行われたかを把握できるべきである。その記録は、機器だけでサンパウロの洪水制御課題を解決すると主張することなく、次の休日期間に向けた将来のしきい値、巡回ルート、人員計画、部門間プレイブックの改善に役立つ。
システム構成
| 項目 | 構成 |
|---|---|
| ポール形状 | ミッドナイトブルーの太陽光発電ミッドセクションとシアンのLEDアクセントリングを備えた、スリムな円筒形または八角形のブラッシュドメタル Sentinel ポール。最終設置は現地エンジニアリング確認を前提とする。 |
| 気象センサーの焦点 | サンパウロの河川横断部における洪水制御しきい値の主要ローカルトリガーとして使用する、ポール上の気象・環境センサーパッケージ。 |
| エッジAIコンピュート | デバイス上推論、低遅延トリアージ、通常分類でクラウドラウンドトリップを不要にするための、組み込み型エッジAIアクセラレーターを備えた換気式ポール上キャビネット。 |
| 地上巡回ロボット | ポールベースにドッキングされ自動充電に対応する、汎用四足歩行型または車輪型巡回ロボット。承認済みの縁石沿いおよび横断部点検ルート向けに構成される。 |
| ドローンユニット | クラムシェルルーフ、汎用クアッドコプター、高精度RTK着陸パッド、自動バッテリーホットスワップマガジンを備えた、白色の SOLARTODO ドローンドック/ネスト。 |
| 視覚および任意センシング | 指向性点検用のPTZカメラ。現地形状と視界が追加センシングを必要とする場所では、オプションの4DレーダーまたはLiDARを評価する。 |
| 電源構成 | 系統電源または風力・太陽光ハイブリッド電源設計。ユーティリティアクセス、日射条件、風力実現性、保守アクセスのレビュー後に選定される。 |
仕組み
- 気象・環境センサーが、河川横断部でローカル定義された洪水制御しきい値を超過する。
- ポール上のエッジAIが、トリガーをPTZカメラのコンテキストと相関させ、イベントをスコアリングする。
- 巡回ロボットが、縁石、排水口、進入部の状態を確認するため、承認済みルートでベースドックを離れる。
- ドローンは、横断部または近接する進入路について承認済みの上空コンテキストが必要な場合にのみ発進する。
- 交通運用部門が、意思決定、ルーティング、エスカレーションのために、1つの共有イベントパケットを受け取る。
- システムは、応答時間レビューのために、センサータイムスタンプ、ロボット観察、オペレーター対応、クローズステータスを記録する。
計画前提(参考値)
購入者が再計算できる例示的な計画入力値であり、達成済みの結果ではなく目標指標です。最終的なエンジニアリング確認が前提です。
| 指標 | 計画前提 | 参考値 |
|---|---|---|
| ロボット点検代替 | 休日洪水監視中に通常であれば人手による目視確認が必要となる選定済みの初期確認を、巡回ロボットが担当する。 | 計画入力として、監視1回あたり約3〜5回の点検ラウンドを自動化。 |
| 応答時間スコアリング | 交通当局が、共有イベントタイムスタンプを用いて、気象センサーアラートからオペレーター判断までの経過時間を測定する。 | 評価用の計画ウィンドウは約10〜15分。ルート区分に応じて調整。 |
| 部門横断ハンドオフ | 個別の非公式更新ではなく、交通、排水、防災、現場監督チーム間で1つのイベントパケットを共有する。 | 検証済みアラート1件あたり約1件の共通インシデント記録。 |
| 休日監視レビュー | 運用監督者が、各休日監視中および監視後に、しきい値品質、ロボットの有用性、意思決定ルーティングをレビューする。 | 監視期間あたり約2回のレビューサイクル。 |
| 手動エスカレーションのフィルタリング | エッジ分類とロボット確認により、監視のみの条件と現場エスカレーションを要する条件を切り分ける。 | 計画用に約4つのアラートカテゴリー: 観察、確認、迂回、閉鎖。 |
導入機器
- 太陽光発電ミッドセクションとLEDアクセントリングを備えた SOLARTODO Sentinel スリムスマートポール本体
- ローカル洪水制御しきい値判定用の気象・環境センサーモジュール
- 組み込み型エッジAIアクセラレーターを備えた換気式ポール上エッジAIキャビネット
- 指向性の回廊および横断部点検用PTZカメラ
- クラムシェルルーフ、RTK着陸パッド、バッテリーホットスワップマガジンを備えた白色の SOLARTODO ドローンドック/ネスト
- 承認済み空中コンテキスト確認向けに構成された汎用クアッドコプター
- ポールベースで自動充電する汎用ドッキング式巡回ロボット
- オプションの4DレーダーまたはLiDARモジュール。現地確認を前提とする。
よくある質問
このサンパウロ提案プロジェクトは、ドローンまたはロボットの購入ですか?
いいえ。提案構成は、フィジカルAIエッジノードとしての SOLARTODO Sentinel を中心とする統合型都市ポール導入である。ドローンと巡回ロボットは、ポールの運用ワークフロー内のモジュールである。単体製品または別個のプログラムとして提示されておらず、その構成は最終的なエンジニアリング確認に依存する。
洪水制御シナリオで交通当局が主導ステークホルダーとなる理由は何ですか?
交通当局は、降雨イベント中に回廊、バス進入路、橋梁ランプ、駅アクセス、迂回ルートを利用可能な状態に保つことに最も直接的な責任を持つステークホルダーである。排水チームが排水作業を担う場合でも、洪水リスクがサービスに影響する際に、モビリティ資産を迂回、一時保持、制限、再開するかを判断しなければならないのは交通運用部門である。
気象センサーは応答時間KPIをどのように改善しますか?
気象・環境センサーは河川横断部で最初のローカルトリガーを提供するため、遠方からの報告や人手による現場通報を待つ前に、イベントをポールで分類できる。これにより、エッジトリアージ、ロボット確認、オペレーター確認、記録された交通判断を含む測定可能な一連の流れが開始される。
巡回ロボットは固定カメラでは提供できない何を追加しますか?
固定PTZカメラは可視範囲を点検できるが、旧市街の横断部には、縁石の影、橋梁進入部、地下道端、詰まった排水口、最適なカメラ角度から外れた歩行者通路が含まれる場合がある。ドッキング式ロボットは、承認済みの近距離巡回ルートを実行して自動充電に戻ることができ、共有インシデント記録に現場コンテキストを追加する。
ポールは最初の判断を行うためにクラウド処理を必要としますか?
通常の第1段階分類は、ポール上の組み込み型エッジAIアクセラレーターを用いたデバイス上推論向けに設計されているため、初期トリアージはクラウドラウンドトリップに依存しない。外部システムは、当局の統合、ガバナンス、保持ポリシーに従って、記録、映像、オペレーター判断を引き続き受け取る場合がある。
実際にサンパウロで設置する前に何を確認する必要がありますか?
最終導入には、ポール配置、構造、ユーティリティアクセス、系統電源または風力・太陽光ハイブリッド電源、ロボットルート安全性、ドローン承認ルール、データガバナンス、保守アクセス、交通運用システムとの統合に関するエンジニアリングレビューが必要となる。提案計画は構成可能なB2B導入モデルであり、完了済みの現場性能を主張するものではない。
さらに詳しく
街路・キャンパス・公共空間で同様のフィジカルAI導入をご検討ですか? エンジニアリング相談を依頼する