
Um Poste de AI Urbana, neste caso SOLARTODO Sentinel Sky Hub, é um nó urbano de borda físico-AI totalmente off-grid: um poste inteligente sem iluminação, com armazenamento em bateria, reabastecimento solar CIGS envolvente em 360°, computação de borda, sensoriamento, operações com drones e suporte a robô terrestre. Esta configuração para Kuala Lumpur apoia a resposta noturna a incidentes de tráfego em um corredor portuário com processamento local e ação de campo autorizada por humanos.
Contexto do Incidente: Pressão da Temporada de Cheias no Corredor Portuário de Kuala Lumpur
Durante a temporada de cheias, as equipes de gestão de emergências em Kuala Lumpur enfrentam um padrão conhecido: a intensidade da chuva aumenta após o anoitecer, os acostamentos tornam-se menos confiáveis, a visibilidade cai e pequenos incidentes em corredores de carga podem se transformar em eventos multiagência. A cidade em si fica no interior, mas a região mais ampla do Vale de Klang depende dos deslocamentos rodoviários entre os distritos logísticos de Kuala Lumpur, parques industriais e a porta de entrada de Port Klang. Quando um veículo pesado imobilizado, uma pequena colisão, detritos caídos ou uma obstrução por água de enchente aparece à noite, o primeiro problema nem sempre é o evento em si. O primeiro problema é a disponibilidade: se uma imagem de campo verificada, um ativo de resposta despachado e um ponto de comunicações durável estão disponíveis sem esperar que uma equipe chegue ao local exato.
Este estudo de caso enquadra uma implantação de corredor proposta e ilustrativa do SOLARTODO Sentinel Sky Hub para uma parte interessada de gestão de emergências em Kuala Lumpur. O arquétipo de corredor é vinculado ao porto, e não focado em amenidades do centro urbano: nós selecionados ficariam em pontos de estrangulamento de tráfego, acessos propensos a cheias, entradas logísticas, vias perimetrais e áreas de preparação onde as equipes de resposta precisam de visão, computação e ação robótica fora do horário comercial. O objetivo não é substituir os serviços de emergência ou as autoridades de controle de tráfego. É fornecer uma camada de borda físico-AI persistente que possa detectar uma condição anormal de tráfego, apoiar a avaliação humana, despachar um robô terrestre ou drone amigo e registrar o pacote de análise do incidente a partir do próprio nó.
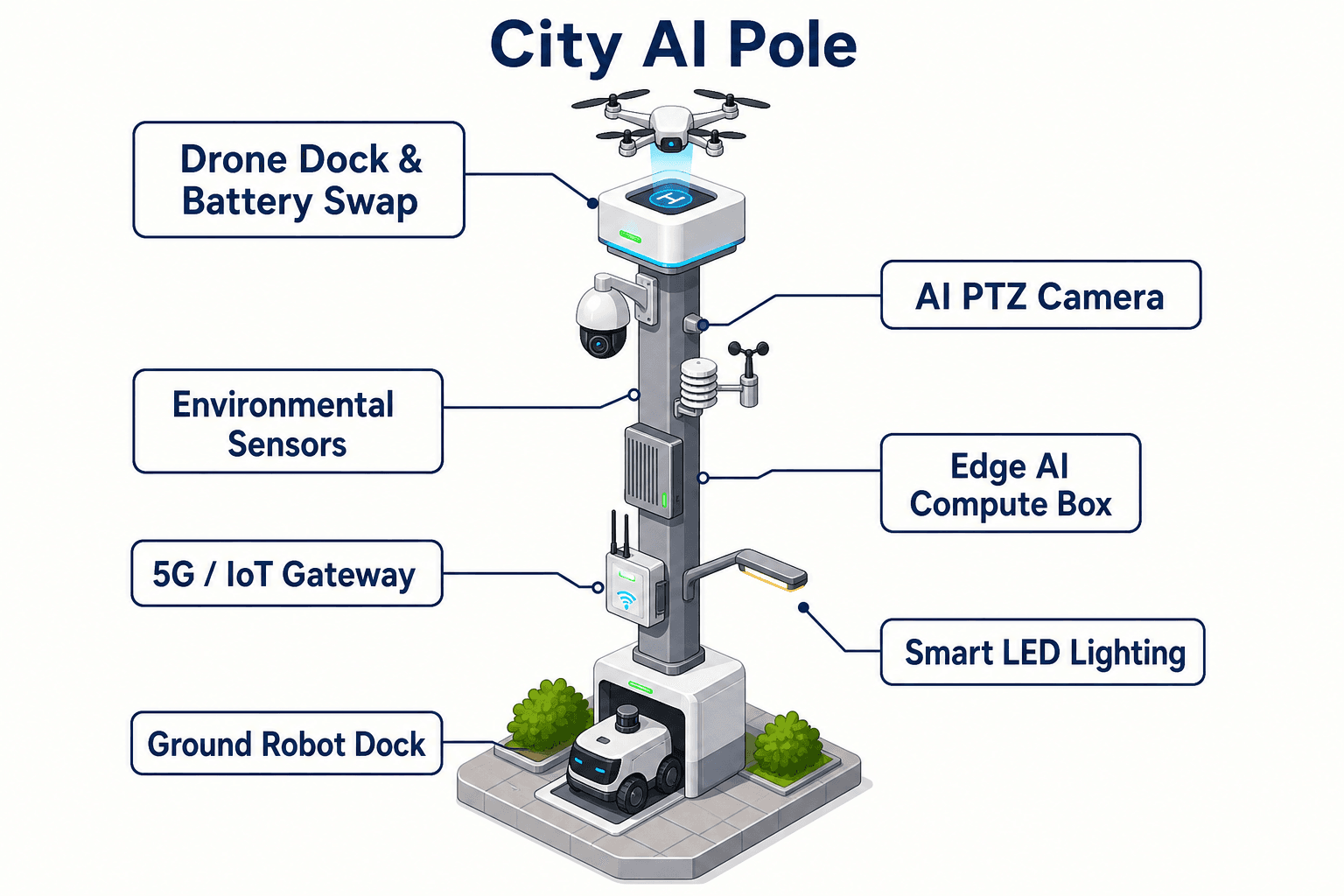
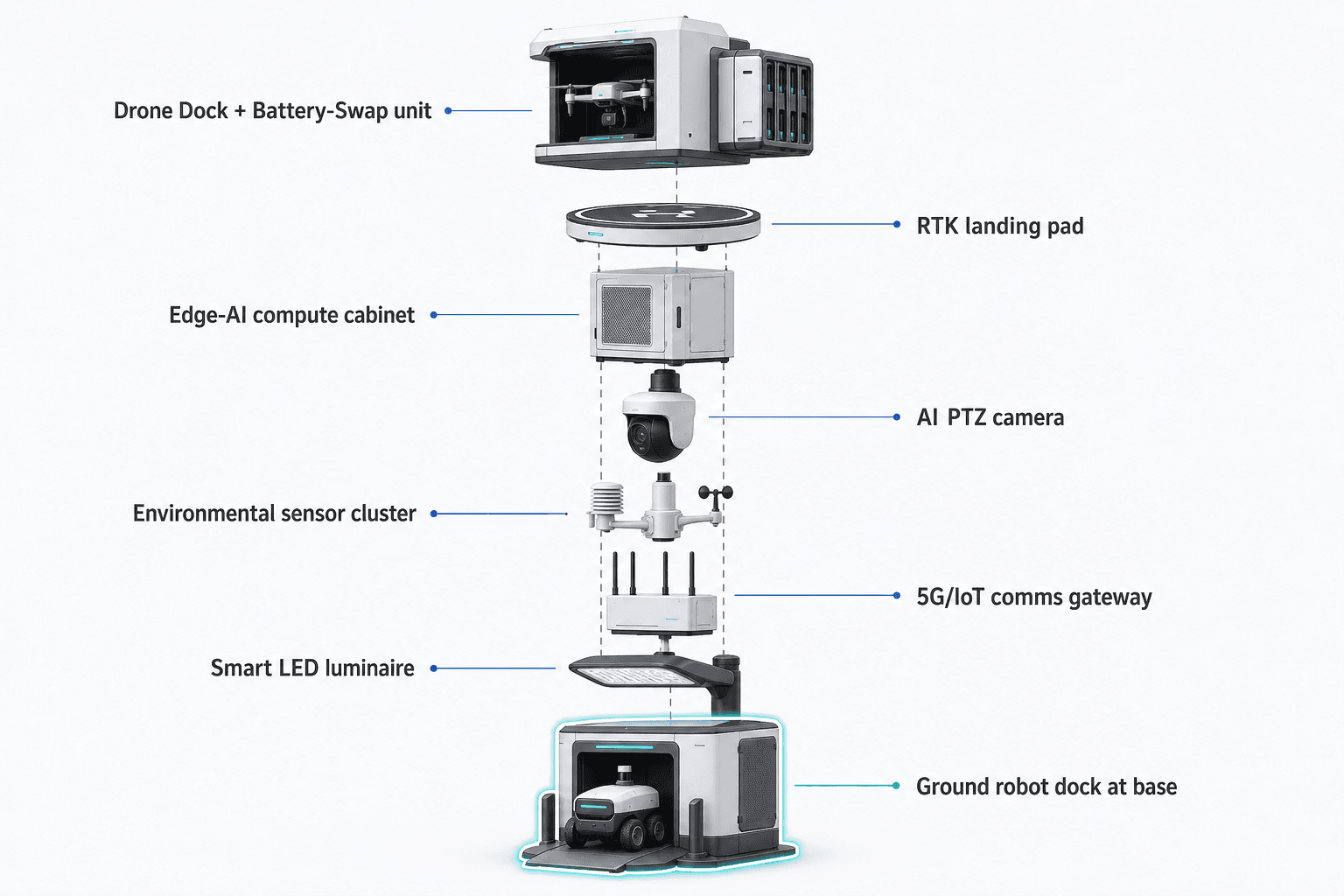
Sky Hub é posicionado aqui como um poste inteligente PURE, não como um ativo de iluminação. Ele não possui sistema de iluminação. O poste funciona como uma microestação off-grid com armazenamento em bateria, reabastecimento flexível por filme fino CIGS envolvente em 360°, inferência no poste, sensoriamento ambiental, sensoriamento de segurança PTZ, operações autônomas com drones, troca rápida de bateria de drones, carregamento de robô terrestre e uma visualização de comando de quadro operacional comum. Em um corredor na temporada de cheias, a pergunta de projeto é direta: cada nó consegue permanecer disponível durante janelas de resposta noturna quando equipes, veículos e acesso à energia estão restritos? Portanto, o enquadramento de KPI proposto foca em disponibilidade-alvo, continuidade de surtidas, prontidão do robô, completude da análise do incidente e percentual de eventos em que apenas metadados desidentificados precisam sair do poste.
Análise do Fluxo de Trabalho de Incidentes de Tráfego
O cenário de análise de incidente começa com uma anomalia de tráfego noturna em uma via de acesso ao porto. Um veículo para em uma posição insegura após chuva forte, o tráfego ao redor começa a se comprimir e a profundidade da água perto do acostamento torna-se incerta. Uma resposta convencional pode depender da chamada de um usuário da via, de um veículo de patrulha passando pelo local ou de feeds de câmeras fixas que talvez não forneçam contexto ambiental local. Na configuração de corredor do Sky Hub, o nó mais próximo executa continuamente percepção local no feed de sua câmera PTZ e em instrumentos ambientais. Ele pode identificar alterações anônimas na contagem de veículos, acúmulo de congestionamento, intrusão em uma zona restrita de acostamento, densidade de pessoas ao redor de um veículo parado e movimento perimetral próximo à linha de cerca de uma instalação logística. Ele não exige que vídeo bruto seja enviado para avaliação normal de eventos.
Depois que o módulo de borda no poste pontua a anomalia, o incidente entra na visualização de quadro operacional comum usada por operadores de gestão de emergências. O sistema apoia o ciclo de operações descrito como sensoriamento, avaliação e resposta autorizadas, agendamento de computação de borda e operações e manutenção em campo. Isso é importante para operações de temporada de cheias em Kuala Lumpur porque a decisão raramente é binária. O operador pode precisar decidir se a cena é apenas uma pane, uma colisão que exige despacho, um bloqueio por água de enchente, uma intrusão de segurança perto do corredor ou um evento misto que exige coordenação de tráfego, resgate, segurança portuária e manutenção.
O fluxo de trabalho centrado no robô então passa da observação para a ação em campo. Um robô humanoide ou de serviço posicionado na base do poste pode ser liberado para patrulha autônoma, inspeção próxima, resposta a alarmes e coordenação ar-terra. Ele pode se aproximar da cena, inspecionar ao redor de barreiras, verificar se há pessoas presentes perto do veículo parado, avaliar o movimento visível da água e retornar à base para carregamento sem fio. O drone amigo pode decolar para inspeção elevada do corredor, observação do tráfego a montante ou reconhecimento de água de enchente. O foco principal do módulo é a troca de bateria: quando o drone retorna, um magazine multislot de serviço traseiro realiza a troca automatizada do pacote descarregado por um carregado, permitindo surtidas consecutivas sujeitas à autorização do operador, limites climáticos e agendamento por ciclo de trabalho.
Isso é mais importante à noite. Um único voo de drone pode verificar um incidente, mas a disponibilidade repetida é o que muda o fluxo de trabalho de gestão de emergências. Se a primeira surtida confirma um veículo parado, a segunda pode verificar a fila a montante, a terceira pode verificar um ponto de desvio e uma surtida posterior pode confirmar que a recuperação foi concluída. Como o nó agenda energia, computação e ativos de campo localmente, ele pode priorizar tarefas de incidente em relação a patrulhas rotineiras e preservar reserva suficiente para o retorno do robô, integridade do sistema, comunicações e empacotamento de evidências.
Projeto de Nó Off-Grid e Planejamento de Disponibilidade
O nó Sky Hub proposto é projetado como uma estação totalmente off-grid: usa armazenamento em bateria com reabastecimento solar no poste e não depende da rede elétrica, da cidade ou de energia do local. O corpo do poste comporta cerca de 15 m² de filme fino CIGS flexível envolvente em 360° sobre uma forma cilíndrica vertical com cerca de 8 m de altura e aproximadamente 0,6 m de largura. A faixa nominal é de aproximadamente 2,4 a 2,7 kWp, mas a premissa prática de engenharia é mais conservadora. Um cilindro vertical coleta sol direto na projeção voltada para o sol, não em todo o envoltório de uma vez. Em regiões de céu claro com alta irradiância, a saída realista é de aproximadamente 0,8 a 1,1 kW DC de pico, geralmente atingindo o pico no meio da manhã ou no meio da tarde, em vez de ao meio-dia, com cerca de 6 a 9 kWh por dia.
As condições tropicais de Kuala Lumpur exigem uma postura de planejamento ainda mais disciplinada porque chuva, umidade, cobertura de nuvens e clima de temporada de cheias podem reduzir o reabastecimento. A camada CIGS deve, portanto, ser tratada como reabastecimento suplementar para uma microestação apoiada por bateria, não como promessa de operação ilimitada apenas com energia solar. O projeto usa armazenamento de classe 5 a 20 kWh, selecionado após engenharia do local, frequência de missão e modelagem de horas de reserva. Tarefas de drones e robôs são amortecidas pelo armazenamento e agendadas por ciclo de trabalho, com a visualização de comando mostrando estado da bateria, estado do magazine de troca, estado de carga do robô, carga computacional e prioridade da fila de missões.
Para um comprador de gestão de emergências, disponibilidade não é um slogan; é uma métrica de planejamento. O modelo de planejamento-alvo deve definir quantos nós precisam estar prontos durante as noites da temporada de cheias, quantas surtidas consecutivas de drone são necessárias antes do serviço manual, com que frequência um robô deve conseguir sair e retornar, e que reserva deve permanecer após um incidente de tráfego de alta prioridade. O magazine de troca de bateria ajuda na disponibilidade porque separa a continuidade da missão do drone do carregamento lento de um único pacote. Vários slots carregados permitem diversas surtidas consecutivas enquanto o nó gerencia ciclos de recarga, limites térmicos e reserva restante.
A mesma lógica de disponibilidade se aplica ao tratamento de dados. Vídeo bruto e fluxos de sensores permanecem no poste para processamento local. Apenas metadados desidentificados de eventos e status podem sair do nó para a visualização de comando, relatórios ou integração com sistemas de gestão de emergências. Essa abordagem orientada a PDPL/LGPD reduz a dependência de largura de banda durante mau tempo e apoia o planejamento de privacidade desde a concepção, permanecendo sujeita à confirmação legal, de cibersegurança e de engenharia final para a implantação malaia específica.
Resposta Liderada por Robô com Suporte de Troca de Bateria de Drone
O valor operacional diferenciado deste projeto de corredor em Kuala Lumpur é a combinação de resposta por robô terrestre e continuidade por troca de bateria de drone. O robô terrestre é o respondedor de curta distância: ele pode sair da base do poste, inspecionar a borda imediata da via, aproximar-se de um veículo parado a uma distância controlada, verificar uma entrada de drenagem ou barreira e fornecer ao operador status local sem enviar um respondedor humano para baixa visibilidade como primeira etapa. Ele pode coordenar com o drone amigo sobrevoando, usando o contexto aéreo para escolher uma rota mais segura ou confirmar se a área do incidente está se expandindo.
O drone é o batedor regional rápido. Ele pode decolar do nó, patrulhar o segmento do corredor, inspecionar o tráfego a montante e a jusante, retornar para troca de bateria e redecolar para tarefas de acompanhamento. O processo de troca rápida é automatizado e de serviço traseiro: após o pouso, o magazine multislot troca a bateria descarregada por um pacote carregado. Isso apoia análises repetidas de incidentes na temporada de cheias sem um operador no local, sujeitas à autorização de missão e restrições climáticas. O valor não é apenas maior tempo de voo; é uma interrupção operacional mais curta entre ciclos de avaliação.
A coordenação Counter-UAS está incluída como uma função de segurança controlada para zonas de infraestrutura crítica próximas a instalações logísticas e vinculadas ao porto. O poste pode detectar e rastrear um drone não autorizado usando seu próprio sensoriamento e entradas opcionais de sensores parceiros, incluindo radar somente quando fornecido externamente por um sistema parceiro aprovado. O poste pode então comandar seu próprio drone amigo para uma resposta não cinética autorizada por humanos, como captura aérea suave por rede ou dissuasão por aproximação. Isso é enquadrado como coordenação sob controle do operador, não como escalonamento automático.
O monitoramento ambiental do nó também apoia decisões de robôs e drones. Velocidade do vento, direção do vento, temperatura, umidade, pressão atmosférica, ruído, PM10, PM2.5 e iluminância contribuem para a liberação de missões e o contexto do incidente. Se vento ou chuva tornarem uma surtida de drone inadequada, o robô pode permanecer como o principal ativo de campo. Se água superficial ou detritos tornarem o deslocamento do robô inseguro, o drone pode fornecer primeiro a inspeção aérea. Esse padrão flexível ar-terra é o motivo pelo qual o sistema é melhor avaliado como um nó de borda físico-AI do que como um sensor convencional montado em poste.
Modelo de Avaliação para Compradores de Gestão de Emergências
A implantação proposta deve ser avaliada por meio de um método de análise de incidentes, e não como um teste genérico de tecnologia. Cada local selecionado do corredor deve ser avaliado quanto à relevância para a temporada de cheias, distância de resposta, opções de comunicação, segurança física, exposição solar, movimentação segura do robô, espaço livre para lançamento de drone, acesso de manutenção e integração com o fluxo de trabalho de comando da parte interessada. O comprador deve definir limites-alvo antes da implantação: meta de uptime do nó, energia mínima de reserva, número de surtidas de drone por janela de resposta noturna, percentual de prontidão do robô, completude do pacote evento-análise e tempo aceitável desde a sinalização da anomalia até a decisão humana.
Nenhuma quantidade de implantação em escala nacional, área de cobertura ou resultado de desempenho alcançado é afirmado aqui. Um programa crível em Kuala Lumpur começaria pelo mapeamento de segmentos prioritários do corredor, seleção de posições representativas para os nós e validação do modelo operacional sob requisitos locais de clima, espaço aéreo, segurança viária e governança de dados. A confirmação de engenharia determinaria o tamanho final do armazenamento, premissas de rendimento solar, projeto de fundação, caminho de comunicações, envelope de rota robótica e número de slots do magazine de baterias necessários para o ciclo de trabalho-alvo.
O pacote de análise de incidentes é o resultado de gestão. Para cada evento de tráfego, o nó pode preservar evidências locais, gerar metadados desidentificados, registrar decisões do operador, registrar tarefas de drones e robôs, mostrar transições de estado da troca de bateria, documentar condições ambientais e resumir a ação de campo ocorrida. Equipes de gestão de emergências podem usar esses pacotes para analisar se as metas de disponibilidade foram cumpridas, se os ativos de resposta foram atribuídos adequadamente e se a cobertura do corredor deve ser ajustada antes da próxima janela de temporada de cheias.
Para um corredor vinculado ao porto em Kuala Lumpur, o benefício estratégico é a continuidade operacional na borda. O nó oferece aos gestores de emergência um ponto local e off-grid de sensoriamento, computação, ação ar-terra e análise. Faz isso sem afirmar autonomia solar ilimitada, sem enviar vídeo bruto para fora do poste como modelo operacional padrão, sem depender de plataformas terceiras nomeadas e sem se posicionar como produto de iluminação. A pergunta prática do comprador torna-se mensurável: quais incidentes do corredor exigem disponibilidade noturna persistente, e quantos nós Sky Hub são necessários para manter a resposta por robô e drone pronta quando as condições da temporada de cheias tornam a primeira verificação mais difícil?
Configuração do sistema
| Parâmetro | Configuração |
|---|---|
| Forma do poste | Poste inteligente PURE SOLARTODO Sentinel Sky Hub, corpo cilíndrico de nó de borda sem iluminação, com aproximadamente 8 m de altura e envoltório CIGS de 360° |
| Sistema de energia | Microestação totalmente off-grid apoiada por bateria, com armazenamento de classe 5-20 kWh e reabastecimento solar CIGS suplementar, sujeito à engenharia do local |
| Troca de bateria de drone | Magazine automatizado multislot de baterias com serviço traseiro para troca por pacotes carregados e surtidas autorizadas consecutivas |
| Suporte a robô terrestre | Zona de carregamento sem fio ao lado da base para patrulha, inspeção, resposta a alarmes e operação de retorno para carga de robô humanoide ou de serviço |
| Computação de Edge AI | Módulo de inferência no poste classe Jetson Orin ou classe Thor para cargas de trabalho locais de vídeo, sensores e agendamento de missões |
| Pacote de sensoriamento | Percepção PTZ por AI mais velocidade do vento, direção do vento, temperatura, umidade, pressão, ruído, PM10, PM2.5 e iluminância |
| Visualização de comando | Dashboard de quadro operacional comum para análise de anomalias, enfileiramento de tarefas, logs de missão, integridade da frota, estado da bateria e autorização humana |
Como funciona
- A percepção PTZ no poste sinaliza uma anomalia de tráfego noturna, acúmulo de fila ou intrusão em zona restrita perto do corredor portuário.
- A Edge AI pontua o evento localmente e o combina com leituras de clima, qualidade do ar, ruído e iluminância.
- A visualização de quadro operacional comum apresenta o evento a um operador de gestão de emergências para autorização humana.
- O nó despacha um robô terrestre e, se as condições permitirem, lança um drone amigo para inspeção do corredor.
- O drone retorna para troca rápida automatizada de bateria e pode ser reimplantado para visualizações de acompanhamento enquanto o robô retorna ao carregamento sem fio.
- O nó registra logs de missão, transições de estado da bateria, decisões do operador e metadados desidentificados do incidente para análise.
Premissas de planejamento (indicativas)
Dados de planejamento ilustrativos que o comprador pode recalcular: métricas-alvo, não resultados alcançados. Sujeito a confirmação final de engenharia.
| Métrica | Premissa de planejamento | Valor indicativo |
|---|---|---|
| Disponibilidade de resposta noturna | Parcela-alvo de noites selecionadas do corredor em que cada nó permanece pronto para sensoriamento de incidentes, despacho de robô e pelo menos uma surtida de drone | Meta de planejamento de ~95% |
| Continuidade de surtidas de drone | O magazine de troca de bateria apoia ciclos repetidos de inspeção na temporada de cheias antes do serviço manual, sujeito a limites climáticos e de reserva | ~3-5 surtidas autorizadas consecutivas por janela de evento |
| Inspeção de campo por robô | O robô terrestre realiza inspeção inicial para anomalias de tráfego selecionadas de baixo a médio risco antes que uma equipe humana entre na cena | ~2-4 tarefas de inspeção automatizadas por janela noturna |
| Deslocamento de patrulha manual | Verificações rotineiras noturnas do corredor são transferidas de patrulha veicular para patrulha programada por drone e robô onde regulamentos e regras de segurança permitirem | ~6-10 verificações de patrulha por semana automatizadas |
| Completude da análise de incidentes | Cada evento sinalizado produz um pacote de log local com metadados desidentificados, histórico de tarefas, contexto ambiental e decisões do operador | Meta de completude do pacote de ~90% |
Equipamentos implantados
- Nó de borda físico-AI em formato de poste SOLARTODO Sentinel Sky Hub
- Gabinete de energia off-grid apoiado por bateria com reabastecimento CIGS flexível envolvente em 360°
- Câmera AI PTZ e stack de percepção local
- Pacote de monitoramento ambiental de nove parâmetros
- Baia de drone autônomo com magazine multislot de troca rápida de bateria
- Base de carregamento sem fio para robô humanoide ou de serviço
- Módulo de computação de borda no poste classe Jetson
- Software de comando de quadro operacional comum para operações autorizadas
Perguntas frequentes
Este estudo de caso de Kuala Lumpur afirma uma implantação governamental ativa?
Não. Esta é uma configuração proposta e ilustrativa para um comprador de gestão de emergências que avalia resposta em corredor vinculado ao porto no contexto de Kuala Lumpur e do Vale de Klang. Ele não afirma um cliente específico, quantidade de nós, área de cobertura, tempo de resposta alcançado ou resultado certificado. O escopo final de implantação exigiria confirmação de engenharia, legal, de espaço aéreo, segurança e compras.
Por que a disponibilidade é o principal KPI para este caso de uso de corredor?
Incidentes noturnos na temporada de cheias são difíceis porque a primeira imagem de campo verificada pode chegar tarde, especialmente quando chuva, congestionamento e condições da via retardam a resposta manual. A disponibilidade mede se o nó consegue manter sensoriamento, computação, surtidas de drones, prontidão do robô, comunicações e registro de evidências online durante a janela de resposta. É um KPI de planejamento melhor do que uma única duração de voo ou especificação de câmera.
Como a troca rápida de bateria de drones melhora a resposta a emergências?
O magazine de troca de bateria reduz a interrupção entre inspeções aéreas. Um drone pousado pode receber um pacote carregado por meio de uma troca automatizada de serviço traseiro e então ser reimplantado para outra tarefa autorizada. Para um incidente de tráfego, isso pode significar uma surtida para verificar o evento, outra para inspecionar a fila a montante e uma surtida posterior para confirmar a recuperação, tudo governado por reserva de energia e limites climáticos.
Qual é o papel do robô terrestre em comparação com o drone?
O robô é o ativo de inspeção de curta distância. Ele pode patrulhar perto do poste, aproximar-se da área de um veículo parado a uma distância controlada, inspecionar detritos, observar água ao nível da via e retornar ao carregamento sem fio. O drone fornece contexto aéreo mais amplo. Juntos, eles apoiam a coordenação ar-terra, com o operador escolhendo o ativo mais seguro com base no tipo de incidente, clima e condições da rota.
Vídeo bruto sai do poste para processamento?
O modelo operacional pretendido mantém vídeo bruto e dados de sensores no poste para processamento local de borda. A visualização de comando pode receber metadados desidentificados de eventos e status, como tipo de anomalia, estado dos ativos, leituras ambientais e logs de missão. Esta é uma abordagem de projeto orientada a PDPL/LGPD, não uma declaração de certificação legal concluída ou conformidade automática para todos os locais.
O Sky Hub é alimentado apenas por energia solar?
O sistema é totalmente off-grid, mas isso não significa operação ilimitada apenas com energia solar. O envoltório CIGS de 360° é uma camada de reabastecimento suplementar para uma microestação apoiada por bateria. A saída prática depende do ângulo do sol, clima e exposição do local, portanto as missões de drones e robôs são amortecidas por armazenamento de classe 5-20 kWh e agendadas por ciclo de trabalho.
Como a atividade de drones não autorizados é tratada perto de infraestrutura crítica?
O nó pode apoiar detecção, rastreamento e coordenação de comando para eventos com drones não autorizados, com autorização humana necessária para mitigação. Seu drone amigo pode ser designado para captura aérea suave por rede ou dissuasão por aproximação quando permitido. Radar não é incorporado ao poste; ele só pode ser considerado como uma entrada opcional de sensor parceiro em um projeto específico do local.
Saiba mais
- Linha de postes City AI / iluminação inteligente
- Mais casos de implantação de cidade inteligente
- Fale com nossa equipe de engenharia
Planejando uma implantação de IA física semelhante para ruas, campi ou espaços públicos? Solicite uma consultoria de engenharia