
Um Poste de IA Urbano, neste cenário de Lisboa, é um nó de edge Physical-AI SOLARTODO Sentinel: um poste inteligente integrado que combina sensorização no poste, inferência de edge-AI embarcada, fluxos de trabalho de comunicações resilientes, uma doca para drone e um robô de patrulha acoplado à base. A implantação proposta apoia a vigilância perimetral da gestão municipal em torno de um perímetro de campus no CBD durante stress de rede relacionado com ondas de calor.
Tarefa no CBD de Lisboa e necessidade interdepartamental
Esta implantação ilustrativa em Lisboa é enquadrada em torno de uma tarefa de gestão municipal, não de uma compra de produto: manter vigilância perimetral fiável em torno do perímetro de um campus municipal no CBD quando uma onda de calor aumenta o stress operacional e uma falha de rede limita a monitorização remota normal. O ambiente-alvo é um contexto de distrito central denso, como um campus de serviços urbanos, parque de operações de mobilidade, perímetro administrativo, interface de espaço público ribeirinho ou ativo municipal de uso misto perto de ruas com elevado fluxo pedonal. Neste contexto, “vigilância perimetral” significa observar o limite de um local gerido pela cidade: portões, vedações, entradas de serviço, vias de entrega, bordas de estacionamento e pontos perimetrais voltados para o público.
A parte interessada não é uma única equipa de segurança. Uma implantação viável seria interdepartamental por desenho. A gestão municipal detém o objetivo de serviço e a disciplina orçamental. A segurança municipal define regras de escalonamento. As equipas de instalações são responsáveis pela energia, posicionamento dos postes, acesso à base e janelas de manutenção. As equipas de TI e comunicações definem o comportamento da rede durante perda parcial ou total de backhaul. As equipas de mobilidade e espaço público reveem como as rotas de patrulha do robô evitam peões, rampas, lancis, ciclovias e aglomerações noturnas. Os revisores jurídicos e de proteção de dados definem o que é gravado, retido, mascarado ou escalado.
O gatilho sazonal é uma onda de calor. Em Lisboa, períodos de temperatura elevada podem prolongar a atividade ao ar livre até horas mais tardias, aumentar a pressão sobre corredores de transporte e elevar a importância de operações perimetrais ininterruptas em torno de ativos municipais. Uma onda de calor também pode expor fragilidades em armários de comunicações, planeamento de energia e disponibilidade de pessoal. O ponto crítico neste caso é a falha de rede: se uma plataforma central de vídeo, ligação de backhaul ou caminho para a cloud estiver indisponível, um modelo convencional de monitorização remota pode perder visibilidade exatamente quando as condições operacionais são menos tolerantes.
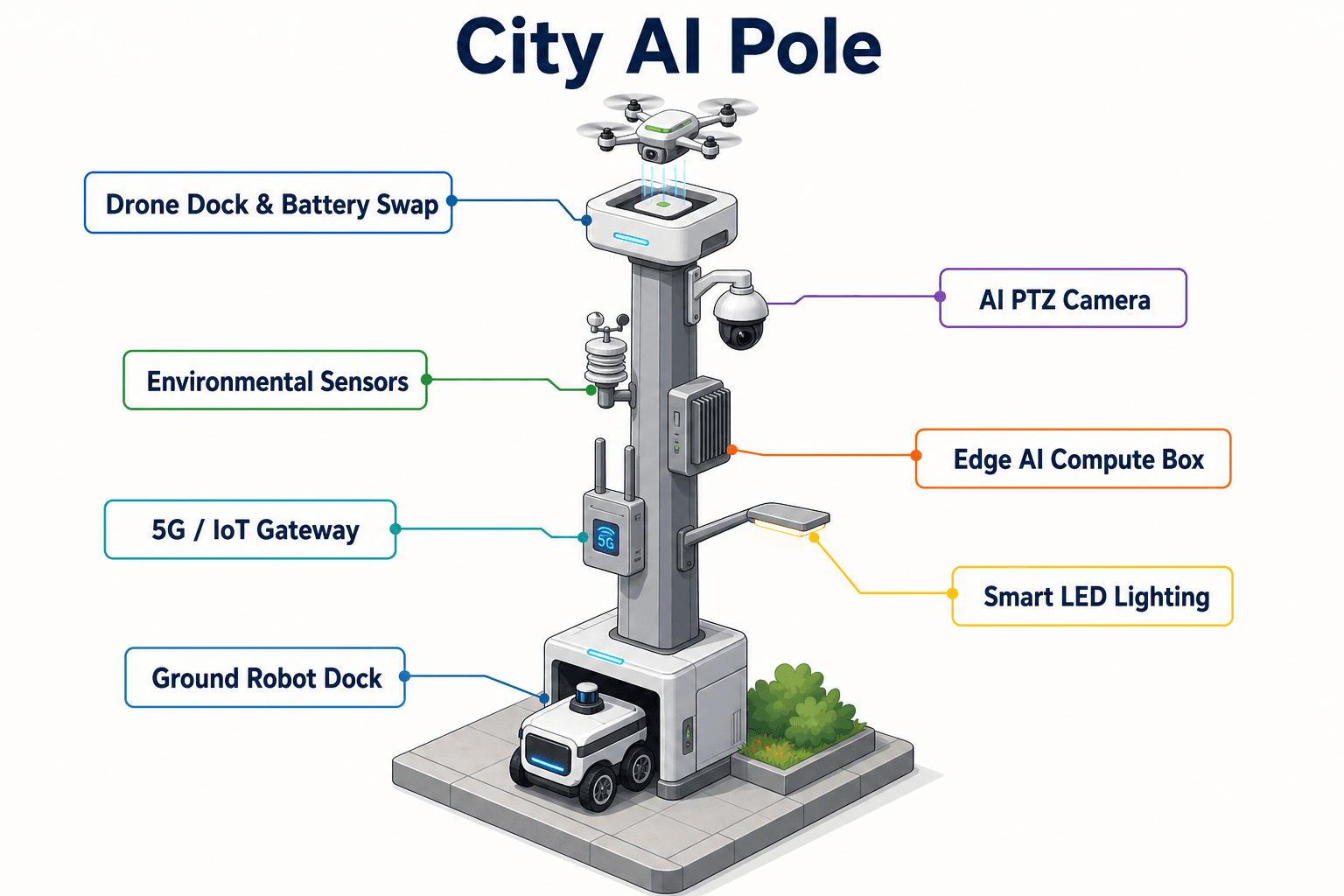
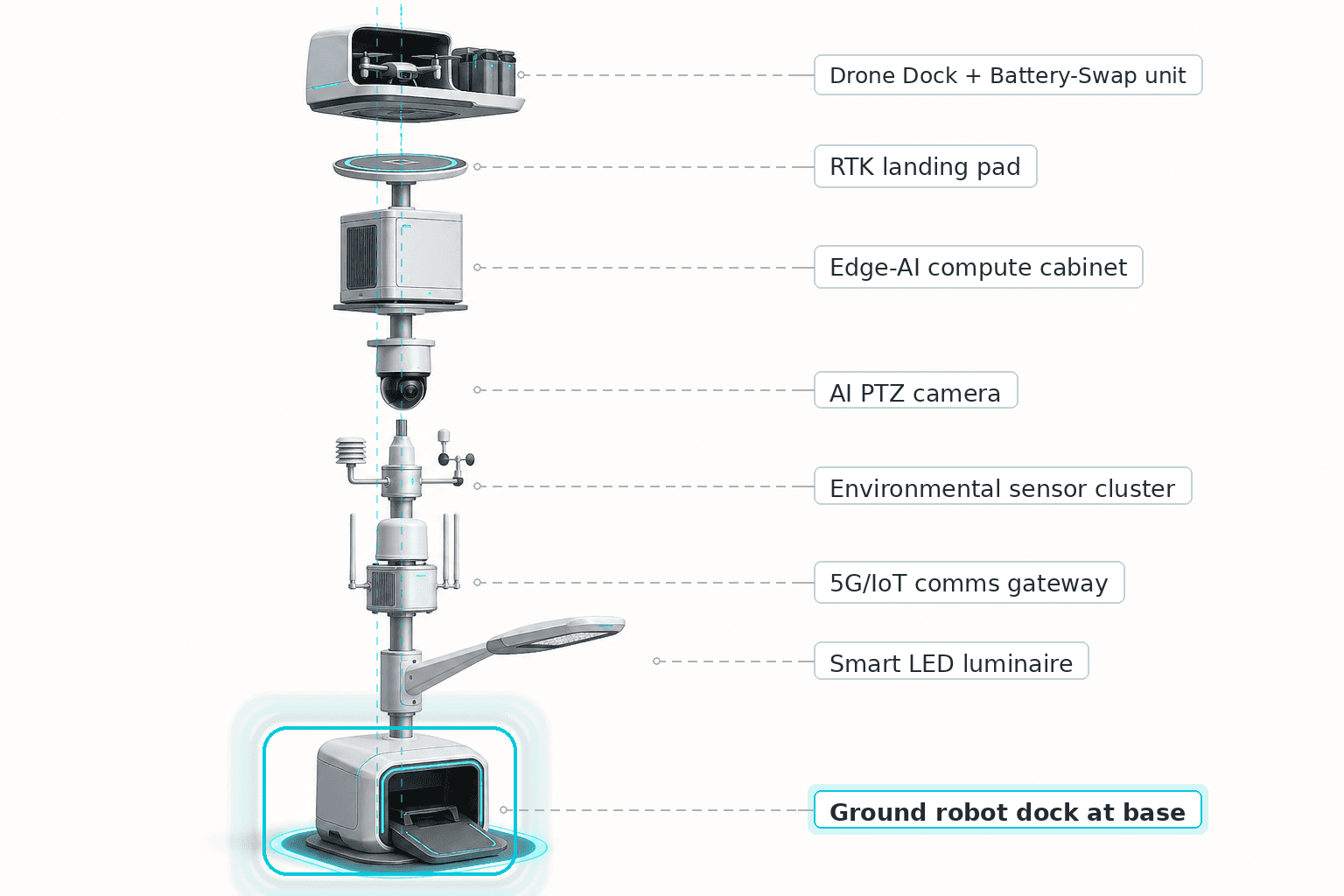
A resposta proposta é uma implantação no perímetro de campus de postes de nó de edge Physical-AI SOLARTODO Sentinel. Cada nó é um poste inteligente cilíndrico ou octogonal estreito, com corpo em metal escovado, secção intermédia fotovoltaica azul meia-noite, anéis de destaque LED ciano, uma doca integrada para drone no topo, uma doca para robô de patrulha na base, sensorização no poste e inferência de edge-AI embarcada. O estudo de caso trata o poste como infraestrutura urbana integrada. Ele não é apresentado aqui como um pacote autónomo de drone ou robô; o robô e o drone são módulos dentro de um sistema configurável de nó de edge urbano, sujeito a confirmação final de engenharia.
Vigilância perimetral conduzida por robô em condições de falha
O módulo operacional principal neste caso é o robô de patrulha. O robô fica acoplado à base do poste com carregamento automático e é usado para estender a observação do nó a partir de um ponto fixo para ciclos de patrulha curtos e repetíveis em torno do limite do campus. Num campus no CBD de Lisboa, isso pode significar verificar portões de serviço, entradas recuadas, barreiras temporárias, entradas de carga, pontos cegos ao longo da vedação e áreas onde uma câmara PTZ fixa pode perder a linha de visão devido a mobiliário urbano, veículos estacionados, declive ou multidões.
O cenário operacional é intencionalmente restrito: vigilância perimetral de campus durante uma falha de rede. O robô não substitui políticas, guardas ou serviços de emergência. Ele fornece uma camada móvel de sensorização e presença que as equipas municipais podem acionar localmente quando o sistema de edge-AI do poste sinaliza uma anomalia ou quando a lógica de patrulha programada solicita a verificação de uma rota. O robô pode ser quadrúpede ou com rodas, dependendo das superfícies do local, transições de lancis, declive, restrições de acoplamento e regras do espaço público. A forma final seria confirmada durante a revisão de engenharia.
O poste SOLARTODO Sentinel apoia este fluxo de trabalho porque a tomada de decisão não depende totalmente de uma ida e volta à cloud. O acelerador de edge-AI embarcado no poste executa inferência localmente num armário ventilado. A câmara PTZ, o sensor meteorológico e ambiental e o radar 4D ou LiDAR opcional alimentam o nó de edge para que o sistema possa classificar eventos, pontuá-los e acionar ações locais mesmo quando o backhaul está degradado. Isso é importante para o OPEX porque o modo de falha dispendioso não é apenas um incidente; é o padrão de resposta manual criado pela incerteza. Se cada falha obrigar a reforçar equipas de patrulha, verificações repetidas por supervisores e varrimentos manuais do perímetro, o custo operacional aumenta rapidamente.
Para a gestão municipal de Lisboa, o padrão conduzido por robô deve ser avaliado como um mecanismo de controlo de OPEX. O objetivo é reduzir caminhadas manuais desnecessárias no perímetro, reduzir despachos sem visibilidade suficiente e melhorar a priorização do tempo da equipa durante períodos de onda de calor. O enquadramento de KPI deve basear-se em inputs de planeamento e métricas de avaliação: número de ciclos de patrulha automatizados por semana, número de verificações duplicadas evitadas, percentagem de eventos resolvidos localmente, número de escalonamentos durante períodos de falha e horas de manutenção por nó. Nenhum resultado alcançado é reivindicado aqui; estas são categorias de avaliação para um piloto proposto ou especificação de aquisição.
Configuração do nó Sentinel focada em comunicações
O foco modular desta implantação proposta são as comunicações. Na prática, isso não significa apresentar o poste como um produto de telecomunicações ou inventar uma arquitetura de rede fixa. Significa configurar o nó Sentinel para que a tarefa municipal continue de forma controlada quando o caminho de rede habitual estiver indisponível. O princípio-chave de desenho é a continuidade local: sentir localmente, inferir localmente, decidir localmente quando a política o permite, despachar o robô localmente e registar eventos para sincronização posterior quando a conectividade voltar.
O armário de edge-AI é central para esta estratégia de comunicações. Como a inferência ocorre no poste, o nó pode continuar a processar entradas de câmaras e sensores sem aguardar análise na cloud. Durante uma falha de backhaul, ele pode priorizar alertas locais, instruções de despacho do robô, clips de eventos e registos de estado. Assim que a conectividade for restabelecida, o sistema pode encaminhar os registos retidos para o ambiente operacional escolhido pela cidade, sujeito a regras de governação de dados e retenção. Este comportamento proposto deve ser validado durante a confirmação de engenharia e os testes de aceitação.
A forma visual também importa numa implantação no CBD. O Sentinel é especificado como um poste único, cilíndrico ou octogonal estreito, com corpo em metal escovado, secção intermédia fotovoltaica azul meia-noite e anéis de destaque LED ciano. Uma doca ou ninho branco para drone SOLARTODO fica no topo, com cobertura em concha, plataforma de aterragem RTK de precisão e magazine de hot-swap de baterias para troca automática rápida de bateria sem citar um tempo fixo de substituição. A unidade terrestre acopla-se à base. Manter estes módulos num único poste urbano reduz a necessidade de armários dispersos, equipamento temporário ou múltiplos ativos de campo desconectados.
O planeamento de energia continua a ser específico do local. O Sentinel pode ser alimentado pela rede elétrica ou por uma configuração híbrida eólica-solar. Em Lisboa, a seleção final dependeria de sombra, restrições de paisagem urbana, contexto patrimonial, exposição ao vento, disponibilidade de energia, acesso para manutenção e regras de obras civis. A secção intermédia fotovoltaica faz parte da arquitetura do poste, mas não deve ser tratada como garantia universal de energia. A operação em onda de calor deve ser verificada em relação à ventilação do armário, ciclo de trabalho da bateria, disponibilidade dos sensores, fiabilidade de acoplamento e acesso seguro ao espaço público.
Modelo operacional interdepartamental
Uma implantação credível depende de regras operacionais partilhadas antes da instalação. A gestão municipal deve definir o objetivo de vigilância perimetral e o modelo de avaliação de OPEX. A segurança deve definir o que conta como uma anomalia de baixa, média ou alta prioridade. A TI deve definir modos de falha, comportamento aceitável de processamento local e regras de sincronização. As instalações devem confirmar fundações dos postes, ligação à rede elétrica ou viabilidade de energia híbrida, acesso ao armário e calendários de limpeza. As equipas de espaço público devem confirmar que as rotas do robô não entram em conflito com peões, percursos de acessibilidade, acesso de emergência, fluxos cicláveis ou layouts temporários de eventos.
O fluxo de trabalho proposto pode ser organizado em três estados operacionais. Em modo normal, a câmara PTZ e os sensores monitorizam o perímetro do campus, o robô realiza patrulhas programadas ou baseadas em eventos e os registos seguem pelo caminho de rede municipal padrão. Em modo de rede degradada, o acelerador de edge-AI embarcado continua a inferência no dispositivo, o poste prioriza a decisão local e o robô ainda pode ser despachado para verificações definidas. Em modo de rede restaurada, os dados de eventos retidos e os logs são sincronizados de acordo com a política aprovada. Esta estrutura ajuda os departamentos a decidir o que deve permanecer disponível durante condições de falha e o que pode esperar.
A unidade de drone está incluída como parte do poste integrado, mas o tema principal aqui continua a ser o robô. A doca para drone pode apoiar inspeção de cima para baixo onde for permitido e tecnicamente viável, usando a doca branca SOLARTODO com cobertura em concha, plataforma de aterragem RTK e magazine automatizado de hot-swap de baterias. Para um perímetro de campus denso no CBD de Lisboa, o uso de drone pode ser mais limitado do que o uso de robô devido a espaço aéreo, segurança pública, meteorologia e regras do local. O desenho prático deve, portanto, evitar depender do voo como único mecanismo de continuidade.
O tratamento de dados deve ser definido como parte da especificação de gestão municipal. O caso apoia inferência no dispositivo e ação de baixa latência sem ida e volta à cloud, mas regras de gravação, redação, períodos de retenção, controlos de acesso e responsabilidades de escalonamento devem ser definidos pelo comprador e pela revisão de conformidade local. O sistema deve ser avaliado como uma configuração operacional de nó de edge, não como uma autoridade autónoma. Supervisores humanos continuam responsáveis por decisões de política, escalonamento de emergência e qualquer ação que exija intervenção formal.
Avaliação de OPEX e prontidão para piloto
O caso de OPEX deve ser construído a partir de pressupostos recalculáveis em vez de poupanças reivindicadas. Um comprador em Lisboa pode modelar a frequência atual de patrulhas manuais no perímetro, exposição a horas extraordinárias durante ondas de calor, verificações duplicadas durante falhas de rede, taxas de despacho falso, visitas de manutenção e tempo de indisponibilidade. A implantação proposta do Sentinel torna-se então uma questão de piloto controlado: pode um poste integrado com inferência local, um robô de patrulha acoplado, fluxos de trabalho de comunicações resilientes e gravação de eventos definida reduzir a quantidade de tempo da equipa gasto a verificar eventos perimetrais de baixa confiança?
Um piloto de perímetro de campus deve começar com levantamentos do local em vez de reivindicações de quantidade. As equipas de engenharia confirmariam linha de visão, geometria da rota do robô, localização de acoplamento, fundação do poste, energia da rede ou híbrida eólica-solar, ventilação do armário, vistas das câmaras, necessidade opcional de radar 4D ou LiDAR, comportamento de fallback de comunicações e acesso para manutenção. O comprador também deve definir condições de paragem: limiares meteorológicos, restrições de eventos públicos, janelas de teste de falha de rede e procedimentos de override manual.
A linguagem de aquisição deve permanecer específica e cuidadosa. O comprador não está a adquirir um poste de câmara genérico, um drone autónomo ou um robô autónomo. O ativo proposto é SOLARTODO Sentinel, um Nó de Edge Urbano Physical-AI com sensorização integrada, computação de edge, doca para drone, doca para robô terrestre, opções de energia e inferência local. A configuração é personalizada e sujeita a confirmação de engenharia. Não devem ser inferidos preços, garantias de cobertura, taxas de deteção ou resultados operacionais a partir deste estudo de caso ilustrativo.
Para a gestão municipal de Lisboa, o resultado útil de um piloto seria um quadro de decisão: quais tarefas perimetrais podem ser automatizadas, quais exigem revisão humana, quais condições de falha o nó consegue tolerar e quais inputs de OPEX se alteram o suficiente para justificar expansão. A lição mais importante é que o desenho de comunicações e o modelo operacional do robô devem ser especificados em conjunto. Durante uma falha de rede em onda de calor, um robô só é operacionalmente útil se o nó de edge ainda conseguir detetar, decidir, agir e registar num ciclo local controlado.
Configuração do sistema
| Parâmetro | Configuração |
|---|---|
| Corpo do poste | Poste estreito cilíndrico ou octogonal em metal escovado, com secção intermédia fotovoltaica azul meia-noite e anéis de destaque LED ciano |
| Computação de edge AI | Armário ventilado no poste com acelerador de edge-AI embarcado para inferência no dispositivo e decisões locais de baixa latência |
| Módulo de robô | Robô de patrulha genérico acoplado à base do poste com carregamento automático, configurado para verificações de rotas no perímetro do campus |
| Módulo de drone | Doca branca SOLARTODO com cobertura em concha, quadcopter genérico, plataforma de aterragem RTK e magazine automatizado de hot-swap de baterias |
| Pacote de sensorização | Câmara PTZ, sensor meteorológico e ambiental, com radar 4D ou LiDAR opcional sujeito a levantamento do local |
| Opção de energia | Alimentação pela rede elétrica ou configuração híbrida eólica-solar, sujeita a confirmação de engenharia do local em Lisboa |
| Continuidade de comunicações | Inferência local, priorização de eventos e fluxo de trabalho operacional store-forward para períodos de rede degradada |
Como funciona
- Câmara PTZ ou radar/LiDAR opcional sinaliza uma anomalia perimetral no limite do campus no CBD.
- O acelerador de edge-AI embarcado classifica e pontua o evento localmente sem ida e volta à cloud.
- Se a política permitir, o poste despacha o robô de patrulha acoplado para verificar o portão, a linha de vedação ou a entrada de serviço.
- Durante uma falha de rede, o nó prioriza alertas locais e retém evidências do evento para sincronização posterior.
- Um supervisor municipal revê o registo, confirma o estado de escalonamento e atualiza o log de avaliação de OPEX.
Premissas de planejamento (indicativas)
Dados de planejamento ilustrativos que o comprador pode recalcular: métricas-alvo, não resultados alcançados. Sujeito a confirmação final de engenharia.
| Métrica | Premissa de planejamento | Valor indicativo |
|---|---|---|
| Mão de obra de inspeção | A patrulha do robô automatiza verificações perimetrais selecionadas que, de outra forma, exigiriam rondas manuais a pé | ~10-20 ciclos de patrulha/semana visados para automação |
| Resposta a falhas | A inferência local de edge reduz despachos sem visibilidade suficiente quando a monitorização central ou o backhaul estão indisponíveis | ~25-40% das verificações de baixa prioridade visadas para verificação local |
| Revisão pelo supervisor | Clips de eventos e logs de estado do robô ficam em fila para revisão após o retorno da conectividade | ~1 lote de revisão consolidado por evento de falha |
| Equipa durante ondas de calor | Janelas de patrulha automatizadas cobrem verificações perimetrais ao fim da noite durante períodos de temperatura elevada | ~2-4 janelas de patrulha noturna/semana visadas |
| Planeamento de manutenção | Poste integrado, doca, carregamento do robô e armário de edge são inspecionados numa única visita de manutenção de campo | ~1 visita de manutenção planeada/nó/mês como input de planeamento |
Equipamentos implantados
- Corpo de poste inteligente SOLARTODO Sentinel com secção intermédia fotovoltaica e anéis de destaque LED
- Armário ventilado no poste para inferência de edge-AI
- Pacote de câmara PTZ e sensor meteorológico/ambiental
- Módulo de sensorização opcional com radar 4D ou LiDAR
- Doca branca SOLARTODO para drone com cobertura em concha e plataforma de aterragem RTK
- Quadcopter genérico com integração de magazine automatizado de hot-swap de baterias
- Robô de patrulha genérico acoplado à base com carregamento automático
- Pacote de ligação à rede elétrica ou energia híbrida eólica-solar
Perguntas frequentes
Isto é um resultado de implantação real em Lisboa?
Não. Esta é uma configuração de implantação B2B proposta e ilustrativa para o planeamento da gestão municipal de Lisboa. Não reivindica um projeto adjudicado, quantidade instalada, taxa de deteção alcançada, área de cobertura, nome de cliente, certificação ou resultado operacional. O objetivo é mostrar como o SOLARTODO Sentinel poderia ser especificado para uma tarefa de vigilância perimetral de campus no CBD, sujeito a confirmação final de engenharia.
Porque é que o robô é o módulo principal para este cenário de Lisboa?
O robô é o módulo principal porque a tarefa é vigilância perimetral de campus, onde câmaras fixas podem não captar portões recuados, entradas de serviço, sombras de veículos estacionados ou barreiras temporárias. Um robô de patrulha acoplado pode realizar ciclos curtos de verificação a partir da base do poste, reduzindo a necessidade de verificações manuais durante períodos de onda de calor e condições de rede degradada, mantendo os supervisores humanos no controlo.
Como o sistema opera durante uma falha de rede?
A configuração proposta depende de inferência no poste, em vez de uma ida e volta obrigatória à cloud. O acelerador de edge-AI embarcado processa entradas de sensores localmente, pontua eventos, despacha o robô onde a política permitir e retém registos de eventos para sincronização posterior. O comportamento exato durante falhas, o encaminhamento de alertas, a retenção e as comunicações de fallback devem ser confirmados pelas equipas de TI e engenharia do comprador.
O SOLARTODO Sentinel substitui guardas ou equipas de resposta de emergência?
Não. O Sentinel é um poste urbano integrado de nó de edge destinado a apoiar deteção, verificação, automação de patrulha e manutenção de registos. Ele não substitui autoridade humana, serviços de emergência ou decisões de política municipal. Neste estudo de caso, o robô ajuda a verificar eventos perimetrais de baixa confiança para que a equipa possa priorizar respostas com base em melhores evidências locais.
O drone pode ser usado como principal ferramenta de inspeção?
O drone faz parte do poste integrado SOLARTODO Sentinel, com doca branca, cobertura em concha, plataforma de aterragem RTK e magazine automatizado de hot-swap de baterias. No entanto, este cenário de Lisboa é conduzido por robô porque condições densas de CBD podem restringir o voo. O uso de drone deve ser tratado como opcional e sujeito a regras do local, revisão de segurança, meteorologia e confirmação de engenharia.
O que deve a gestão municipal de Lisboa medir num piloto?
O comprador deve medir KPIs de planeamento em vez de assumir poupanças antecipadamente: patrulhas manuais evitadas, eventos durante períodos de falha verificados localmente, tempo de revisão do supervisor, visitas de manutenção, conclusão de rotas do robô e qualidade do escalonamento. Estes inputs permitem que a cidade recalcule o impacto no OPEX usando o seu próprio modelo laboral, plano operacional para ondas de calor, arquitetura de rede e requisitos de serviço.
Saiba mais
- Linha de postes City AI / iluminação inteligente
- Mais casos de implantação de cidade inteligente
- Fale com nossa equipe de engenharia
Planejando uma implantação de IA física semelhante para ruas, campi ou espaços públicos? Solicite uma consultoria de engenharia