
A City AI Pole, or SOLARTODO Sentinel physical-AI edge-node, is an integrated smart pole that combines edge inference, sensing, resilient power, a drone dock, and a docked patrol robot. In this proposed Athens police pilot, the node supports post-disaster night patrol when network service is unreliable, using on-device AI to triage events and reduce false alarms.
1. Pilot Context: Mountain-City Policing Under Outage Conditions
This pilot report describes a proposed, illustrative configuration for deploying SOLARTODO Sentinel Physical-AI edge-node poles in Athens, Greece, subject to final engineering confirmation. The project is framed around a police night-patrol task rather than a product demonstration: keeping targeted public-safety observation active after a disaster when network access is unreliable, street-level visibility is reduced, and patrol teams must cover difficult terrain.
Athens is a dense capital city set within a basin and shaped by surrounding mountains and hills, including Hymettus, Penteli, Parnitha, Lycabettus, and the routes that climb between urban neighborhoods, peri-urban edges, parks, infrastructure corridors, and steep residential streets. For police planning, this mountain-city profile matters. After severe weather, fire, flood, slope erosion, road blockage, or utility disruption, a small incident can generate many alarms from cameras, residents, access points, and field officers. At night, the cost of a wrong dispatch rises because crews may be sent into narrow streets, poorly lit slopes, damaged road segments, or locations where communications are intermittent.
The seasonal trigger for this proposed pilot is a typhoon-season resilience window used as a planning discipline by multinational emergency programs. Athens is not presented here as a tropical-typhoon city. The relevance is operational: police and emergency stakeholders want to evaluate whether a city edge node can remain useful during a storm-season posture, when degraded connectivity, wind, rain, debris, and power instability can produce both genuine incidents and noisy alerts.
The proposed deployment mode is post-disaster infill. The Sentinel pole is not positioned as a broad citywide replacement for existing infrastructure. It is proposed as an infill node for locations where fixed CCTV, radio backhaul, street lighting, or routine patrol coverage may be insufficient after disruption. In Athens, candidate locations could include mountain-facing road approaches, public squares near steep access streets, park edges, mobility interchanges, municipal service yards, and temporary command-area perimeters. Specific sites, quantities, civil works, permits, and coverage assumptions would need local survey and engineering confirmation.
The primary stakeholder in this report is the police buyer: operational commanders, public-safety technology teams, procurement officers, and emergency liaison staff. Their core question is not whether the pole has advanced modules; it is whether the integrated node can help a night-patrol desk distinguish a real field concern from a false alarm during a network outage.
2. Proposed Sentinel Role: Robot-Led Night Patrol With Edge Decisions
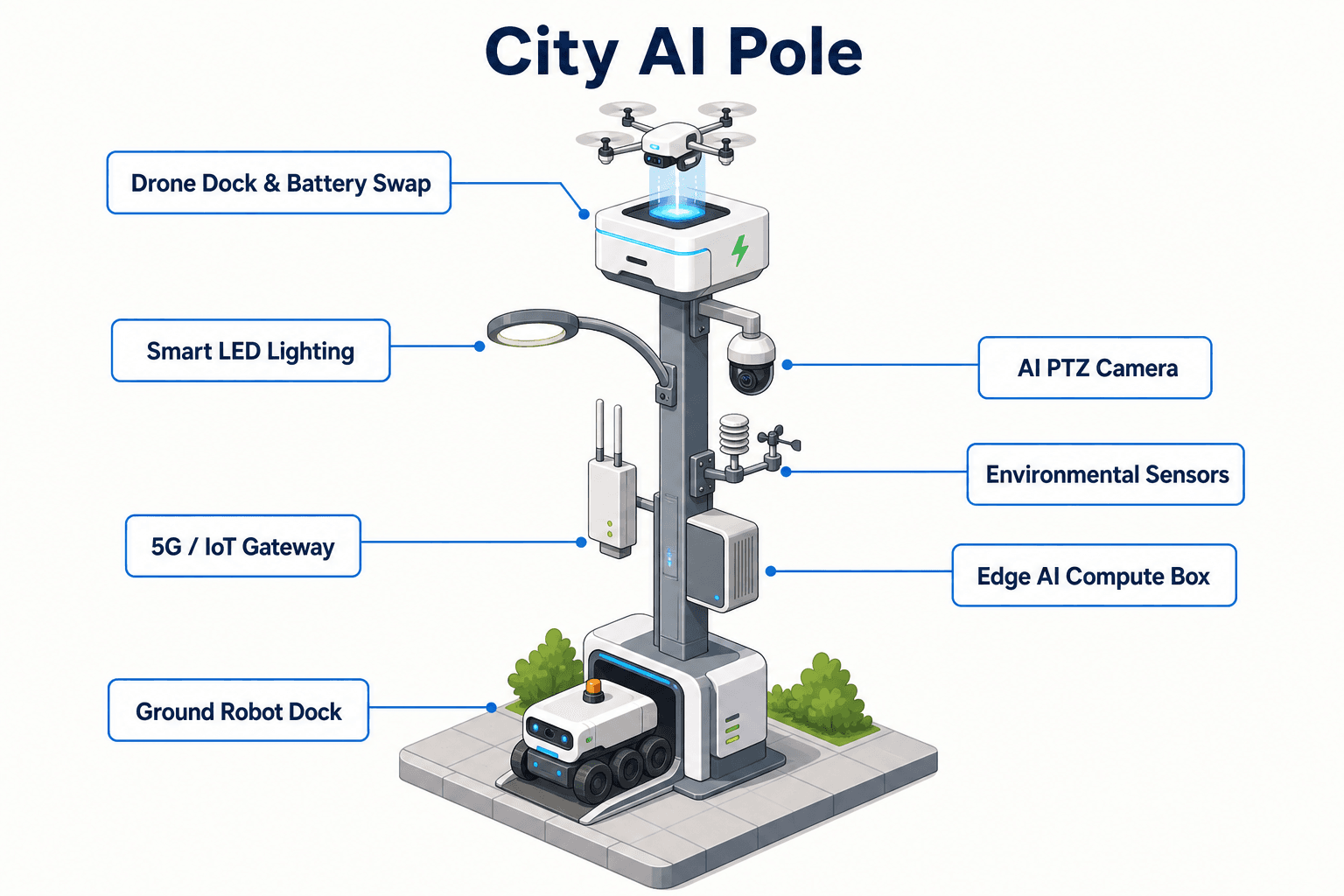
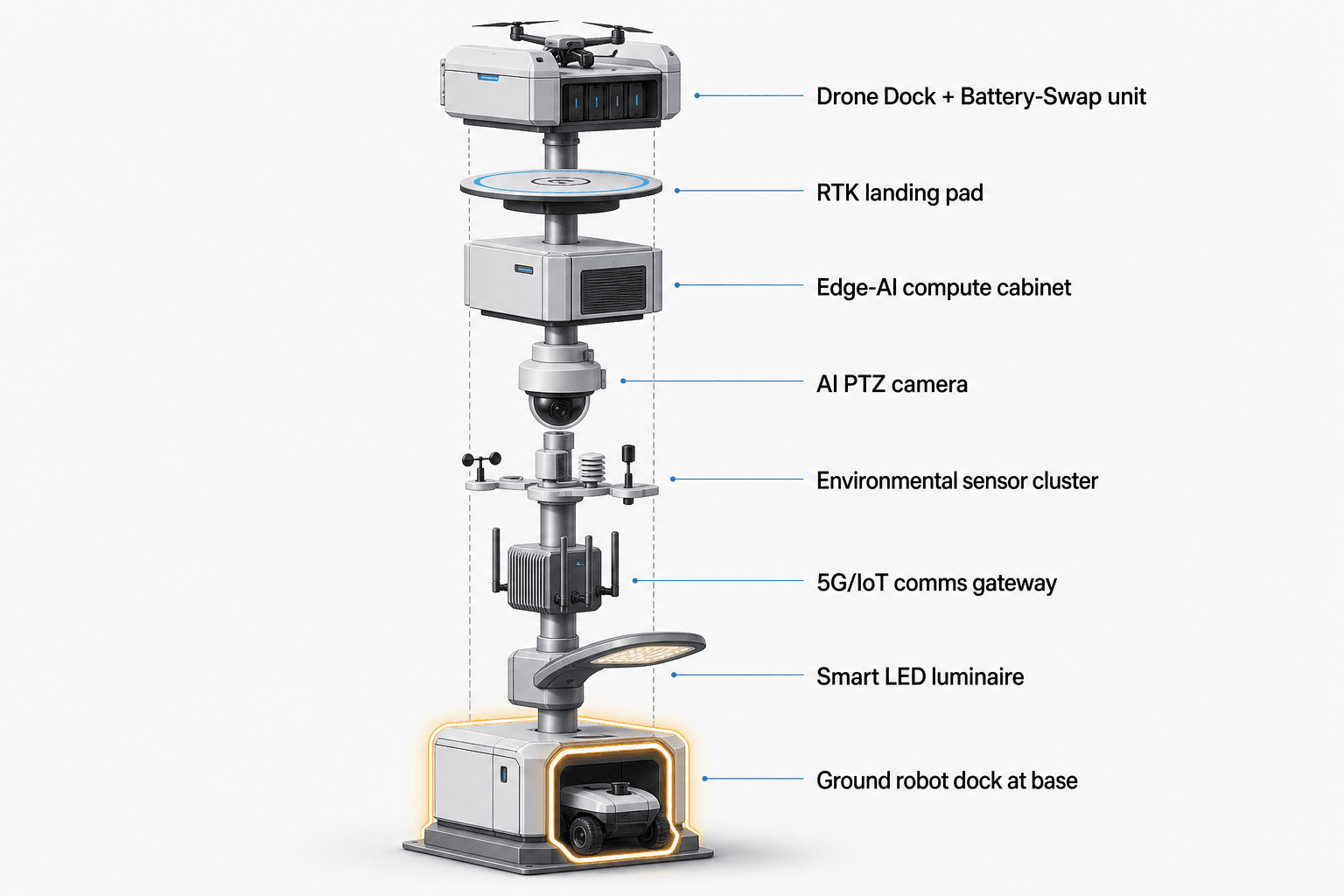
The proposed task for SOLARTODO Sentinel in Athens is robot-led night patrol around a defined post-disaster infill zone. The Sentinel is one slim cylindrical or octagonal smart pole with a brushed-metal body, midnight-blue photovoltaic mid-section, and cyan LED accent rings. The pole integrates a top drone unit, a ground patrol robot dock, edge compute, sensing, and resilient power options in a single city asset. It is not proposed as a standalone drone sale or a standalone robot sale; the value comes from the integrated city pole.
For the night-patrol scenario, the ground unit is the operational focus. A generic quadruped or wheeled patrol robot remains docked at the base of the pole for auto-charging, then moves through a short inspection route when the edge-AI system flags a condition that merits local confirmation. That route could be configured around a plaza perimeter, a service-road gate, a blocked-street approach, a hillside stair, or an infrastructure frontage, subject to terrain validation. The robot’s purpose is not to replace police judgment. Its role is to provide a closer second look before an officer is sent into the area or before an alert is escalated to a control room.
The pole’s sensing layer supports that workflow. A PTZ camera watches the patrol zone. Weather and environmental sensors provide local conditions that help explain whether motion, debris, lighting change, or rain may be affecting the scene. Optional 4D radar or LiDAR can be considered where line-of-sight, darkness, smoke, or reflective surfaces complicate camera-only interpretation. All optional modules would be selected based on site conditions, privacy requirements, police operating policy, and engineering confirmation.
On the top of the pole, a white SOLARTODO drone dock or nest with a clamshell roof holds a generic quadcopter. The drone has a precision RTK landing pad and a battery hot-swap magazine for rapid automated battery change to minimize downtime. In this Athens pilot framing, the drone is a supplementary elevated inspection tool. It may be launched when the police desk needs a higher viewpoint over a blocked road, damaged slope, inaccessible courtyard, or perimeter edge. No exact battery-swap time, flight duration, range, or response time is assumed here.
The edge compute cabinet is central to the outage scenario. It contains an embedded edge-AI accelerator in a ventilated on-pole cabinet. Inference happens on the device, supporting low-latency classification without requiring every frame or event to complete a cloud round-trip. That matters when network service is unstable. If connectivity is degraded, the node can continue to classify events locally, score confidence, trigger the robot or drone workflow according to policy, and preserve records for later synchronization where permitted.
3. Power-Centered Configuration for Network-Outage Resilience
The module focus for this pilot is power because network-outage response is only credible if the node can stay useful when the wider environment is stressed. In post-disaster Athens conditions, a smart pole that depends entirely on stable backhaul and uninterrupted mains power may become another blind spot. The proposed Sentinel configuration therefore treats power as the foundation for sensing, inference, robot docking, and event recording.
SOLARTODO Sentinel can be configured for grid power or wind-solar hybrid power. For this pilot report, the recommended planning concept is grid connection where available, with a wind-solar hybrid configuration evaluated for locations exposed to mountain winds or where resilience requirements justify it. The midnight-blue photovoltaic mid-section contributes to the pole’s integrated power strategy, while the final balance of grid input, solar contribution, wind component, storage, and load management would be engineered for each site. No autonomy duration is claimed in this report.
Power management affects the robot workflow directly. The patrol robot docks at the pole base with auto-charging, which allows police teams to treat the node as a ready station rather than a loose field device requiring manual battery handling after each task. In a night-patrol context, that means a dispatch desk can reserve the robot for confirmation events rather than continuous wandering. This is important for false-alarm-rate evaluation: the robot should be sent when the edge score and operating rules justify a second look, not for every sensor fluctuation.
Power also affects the drone subsystem. The top drone dock’s clamshell roof protects the docked quadcopter, while the hot-swap battery magazine is intended to reduce downtime between missions without requiring police or maintenance staff to climb the pole or handle aircraft batteries during every cycle. In this pilot, the drone remains a controlled module within the integrated Sentinel pole, with operating permissions, weather thresholds, and site-specific flight rules to be confirmed by the buyer and relevant authorities.
During a network outage, the edge-AI cabinet needs enough power stability to continue local inference and event logging. The PTZ camera, weather sensor, optional radar or LiDAR, LED status accents, robot dock, drone dock, and communications equipment all draw from the same operational power plan. A practical Athens pilot would therefore test load-shedding policies: for example, retaining core camera inference and robot charging while limiting nonessential lighting or pausing drone readiness under certain power conditions. These are configuration decisions, not fixed product claims.
The expected operational benefit is continuity of triage. When officers receive many alerts after a storm, fire, or infrastructure failure, the Sentinel pole can locally evaluate visual and environmental context, call the robot for ground confirmation when configured, and store event evidence even if network connectivity is intermittent. The power design is what keeps that loop available long enough to be useful.
4. KPI Method: False-Alarm-Rate Evaluation, Not Claimed Results
The KPI framing for this Athens pilot is false-alarm rate. The report does not claim achieved reductions, detection percentages, latency numbers, coverage area, or deployment results. Instead, it defines how a police buyer could evaluate whether the proposed Sentinel configuration improves night-patrol decision quality under network-outage conditions.
The baseline problem is familiar in post-disaster policing. At night, a PTZ camera may see shadow movement, wind-blown debris, reflections on wet stone, animals, unauthorized entry, damaged barriers, or actual human activity. Residents may report suspicious movement near damaged streets or closed public areas. A control desk must decide whether to dispatch officers, ask a nearby unit to verify, check another camera, or ignore the event. When network service is degraded, cloud analytics, remote video review, and central coordination may be slower or unavailable. That increases the risk that false alarms consume police attention while real events wait.
In the proposed Sentinel workflow, false-alarm-rate evaluation would compare raw alerts against edge-scored alerts, robot-confirmed alerts, and officer-validated outcomes. The police buyer would define what counts as an actionable alert before the pilot begins. For example, an actionable event might require unauthorized presence in a restricted post-disaster zone, repeated movement near a critical entrance, object removal from a municipal staging area, or a safety hazard observed on a patrol route. The Sentinel pole’s role is to add local context before escalation.
A practical evaluation would avoid treating the edge AI as the final authority. The embedded edge-AI accelerator classifies and scores events on the pole. If the score exceeds configured thresholds, the ground robot can perform a closer inspection route. If a higher perspective is justified and authorized, the quadcopter can launch from the SOLARTODO dock for an overhead view. The control desk then receives a structured record: time, sensor trigger, AI category, confidence band or policy score, robot confirmation status, drone confirmation status where used, and operator disposition.
For Athens, the important KPI is not only fewer alerts; it is fewer wrong escalations during a stressful night shift. A system that suppresses too many events would be unacceptable. Therefore, the pilot should evaluate false-alarm rate alongside missed-event review, officer override frequency, robot mission usefulness, power-state stability, network outage duration, and record completeness. The city and police buyer would set target thresholds during procurement and revise them after site survey and legal review.
The proposed evaluation period should include planned outage simulation, nighttime operation, weather variation where available, and controlled test events. It should also include privacy and data-retention rules, because police use of mobile sensing in public space must be governed by policy, auditability, and clear operating permissions. This report presents target planning inputs only, not operational results.
5. Pilot Operating Model and Buyer Decision Path
The proposed Athens pilot would be managed as an operational pilot report with defined acceptance questions. First, can the Sentinel pole maintain a useful detect-decide-act-record loop when the network is degraded? Second, can the ground robot improve police confidence before dispatching officers into a post-disaster night-patrol zone? Third, does the power configuration keep the most important modules available according to local priorities? Fourth, does the workflow reduce the share of alerts that police later classify as false, without hiding real risks?
The pilot should begin with site selection and engineering survey. Police stakeholders would nominate candidate infill locations based on disaster response plans, night-patrol pressure, and known communications vulnerability. Engineering teams would assess mounting conditions, power options, wind exposure, solar access, robot route suitability, drone operating constraints, sensor sightlines, cabinet ventilation, maintenance access, and compliance requirements. The final configuration would remain subject to engineering confirmation.
Next, the buyer would define operating rules. These rules should specify when the PTZ camera can scan, when the robot may leave the dock, what routes it may take, when the drone may launch, what happens when power drops below a configured state, and what evidence is stored locally. The rules should also define escalation thresholds for police staff. The objective is disciplined automation: the node helps police filter and confirm events, but police policy determines escalation.
Training should be practical and scenario-based. Operators need to understand what the edge-AI cabinet does locally, what it does not decide, how robot confirmation is displayed, how the drone module is controlled, and how records are reviewed after connectivity returns. Maintenance teams need procedures for inspecting the pole body, photovoltaic mid-section, LED rings, weather sensor, PTZ camera, robot dock, drone dock, clamshell roof, hot-swap magazine, and ventilated compute cabinet.
The buying decision should be based on pilot evidence rather than broad claims. A police buyer should ask whether the proposed Sentinel configuration provides enough value in the specific Athens terrain and outage scenario to justify further engineering design. If the pilot data shows that alerts remain noisy, robot routes are impractical, or power priorities are misaligned, the configuration should be adjusted before any broader deployment is considered. If the pilot demonstrates a credible path to lower false-alarm rate and better night-patrol triage, the next step would be a formal site-by-site design package with permissions, civil works, integration, and operating policy defined in detail.
System Configuration
| Parameter | Configuration |
|---|---|
| Pole form factor | Slim cylindrical or octagonal city pole with brushed-metal body, midnight-blue photovoltaic mid-section, and cyan LED accent rings. |
| Edge AI compute | Ventilated on-pole cabinet with embedded edge-AI accelerator for on-device inference and low-latency operation without mandatory cloud round-trip. |
| Ground patrol unit | Generic quadruped or wheeled patrol robot docked at the pole base with auto-charging for configured night-patrol confirmation routes. |
| Drone unit | White SOLARTODO clamshell drone dock with generic quadcopter, precision RTK landing pad, and automated battery hot-swap magazine. |
| Sensing package | PTZ camera, weather and environmental sensor, with optional 4D radar or LiDAR subject to site conditions and engineering confirmation. |
| Power configuration | Grid connection or wind-solar hybrid configuration, with final load management and storage assumptions determined by site engineering. |
| Deployment mode | Post-disaster-infill node for police night-patrol triage in selected Athens outage-prone locations, subject to permits and operating policy. |
How It Works
- On-pole PTZ camera and environmental sensors flag a night-time anomaly in the post-disaster infill zone.
- The embedded edge-AI accelerator classifies the event locally and applies the police-defined escalation policy.
- If configured thresholds are met, the docked patrol robot leaves the base to perform a short confirmation route.
- If an elevated view is authorized, the generic quadcopter launches from the SOLARTODO clamshell dock for supplemental inspection.
- The node records the sensor trigger, AI score, robot confirmation, optional drone view, power state, and operator disposition.
- When connectivity is available, the record synchronizes for police review and false-alarm-rate analysis.
Planning Assumptions (Indicative)
Illustrative planning inputs a buyer can recompute — target metrics, not achieved results. Subject to final engineering confirmation.
| Metric | Planning assumption | Indicative value |
|---|---|---|
| Inspection labor | Robot confirmation replaces a portion of manual night verification walks in the selected pilot zone. | ~5 to 10 patrol checks per week automated for planning comparison. |
| False-alarm review | Raw sensor alerts are compared with edge-scored and robot-confirmed alerts before police escalation. | Target reduction band to be set by buyer, e.g. ~10% increments for evaluation. |
| Outage continuity | Local inference continues during planned network degradation tests without depending on a cloud round-trip for every event. | ~1 outage drill per month during the pilot window. |
| Operator workload | Control-desk staff review structured event records instead of unfiltered video-only alerts. | ~3 alert categories prioritized for pilot scoring. |
| Power resilience | Grid or wind-solar hybrid configuration is evaluated against the selected sensor, robot, dock, and edge-compute load. | ~2 power profiles compared during engineering planning. |
Deployed Equipment
- SOLARTODO Sentinel smart pole body with photovoltaic mid-section and LED accent rings
- Ventilated on-pole edge-AI inference cabinet with embedded edge-AI accelerator
- PTZ camera assembly
- Weather and environmental sensor package
- Optional 4D radar or LiDAR module
- White SOLARTODO drone dock with clamshell roof, RTK landing pad, generic quadcopter, and battery hot-swap magazine
- Docked generic quadruped or wheeled patrol robot with auto-charging base
- Grid or wind-solar hybrid power interface, subject to site engineering
Frequently Asked Questions
Is this an actual completed Athens deployment with measured results?
No. This is a proposed and illustrative B2B pilot configuration for Athens police planning, subject to final engineering confirmation. It does not claim installed quantities, achieved false-alarm reduction, coverage area, latency performance, customer approval, certification, or operational results. The KPIs described are target evaluation metrics that a buyer can define, test, and recompute.
Why is the pilot focused on the patrol robot instead of the drone?
The operational scenario is police night patrol after a disaster, where a ground-level second look can help determine whether an alert deserves officer dispatch. The robot is docked at the pole base with auto-charging and can be configured for short confirmation routes. The drone remains part of the integrated Sentinel node, but it is treated as a supplemental elevated inspection module.
How does the Sentinel node help during a network outage?
The pole includes an on-pole embedded edge-AI accelerator in a ventilated cabinet, so inference can occur locally without requiring every event to complete a cloud round-trip. During degraded connectivity, the node can continue scoring events, triggering configured robot or drone actions, and recording structured evidence for later review, depending on local policy and power availability.
What makes power the central design issue for this Athens pilot?
Post-disaster night patrol only works if sensing, local inference, robot docking, and event recording remain available when city conditions are unstable. The proposed Sentinel configuration can use grid power or a wind-solar hybrid approach, with the photovoltaic mid-section and final power design engineered around local exposure, load priorities, and resilience requirements.
How should police evaluate false-alarm rate without overstating results?
The buyer should define an actionable alert before the pilot begins, then compare raw alerts, edge-scored alerts, robot-confirmed alerts, and officer-validated outcomes. The evaluation should also track missed-event review, operator overrides, power state, and record completeness. Any improvement should be reported only after controlled testing and operational validation.
Can the deployment include radar or LiDAR in Athens?
Optional 4D radar or LiDAR can be considered when camera-only sensing may be limited by darkness, smoke, reflections, weather, or complex terrain. Inclusion should follow site survey, privacy review, integration design, and engineering confirmation. The proposed baseline already includes a PTZ camera and weather or environmental sensing.
Is SOLARTODO Sentinel sold here as a separate drone or robot system?
No. The article treats SOLARTODO Sentinel as an integrated city pole: pole body, edge compute, sensing, power, drone dock, and docked patrol robot work as one physical-AI edge node. The drone and robot are generic modules within the city pole configuration, not separately promoted branded products.
Explore Further
- City AI Pole / smart streetlight product line
- More smart-city deployment cases
- Talk to our engineering team
Planning a similar physical-AI deployment for streets, campuses or public spaces? Request an engineering consultation