
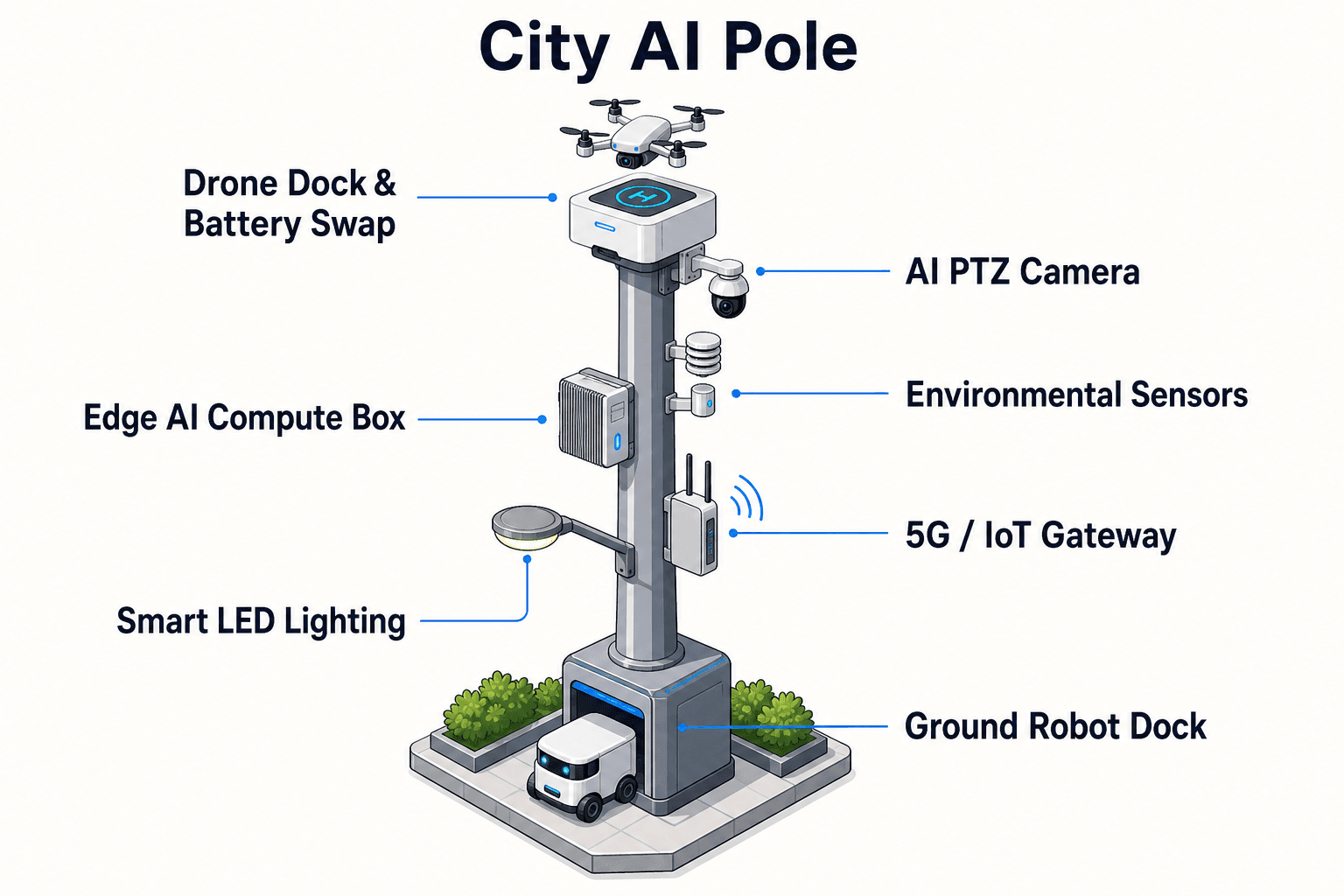
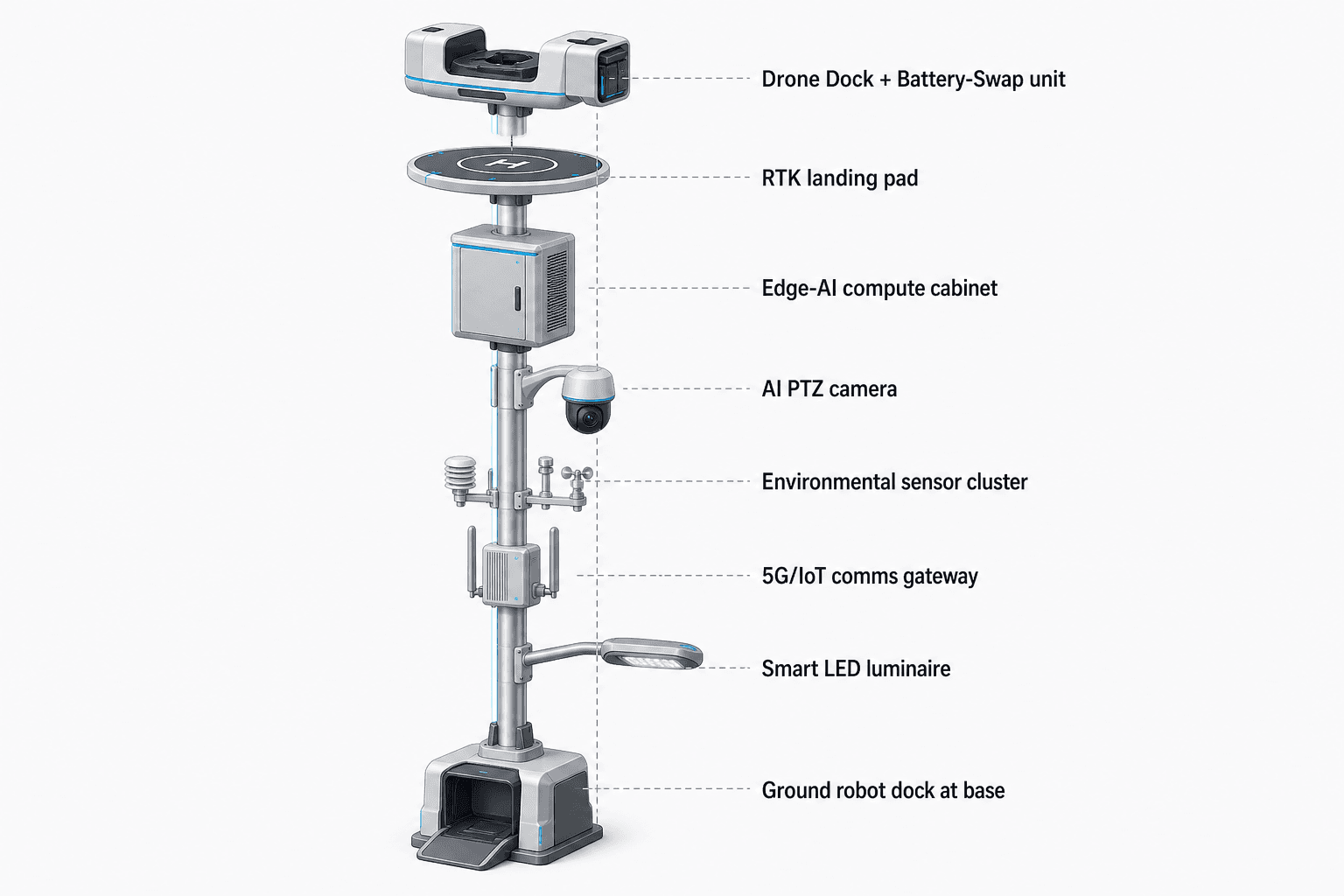
A City AI Pole is a non-lighting physical-AI urban edge node that combines off-grid energy storage, edge compute, sensing, drone operations and ground robot support in one pole-form station. In Cairo, SOLARTODO Sentinel Sky Hub is proposed for temporary night-economy event patrols, helping police collect local evidence metadata and coordinate authorized response without sending raw video off the pole.
1. Incident Context: Cairo Night-Economy Patrol
Cairo’s cultural-tourism night economy creates a demanding security pattern: dense pedestrian flows, buses and private vehicles arriving near heritage districts, vendors and visitors moving through narrow approaches, and temporary event perimeters that may shift over a single evening. The police task is not simply to watch a fixed line. It is to understand what happened, preserve useful evidence, and shorten the time between an anomaly and an authorized field response. This proposed incident-review case study places SOLARTODO Sentinel Sky Hub poles at temporary event control points around cultural-tourism corridors such as heritage-market approaches, museum-adjacent gathering areas, Nile-side event access points and managed pedestrian routes. The configuration is illustrative and subject to final engineering confirmation for each venue, route geometry, radio environment and permission model. The operational problem is evidence collection during night patrol. A foot patrol may arrive after a disturbance has already moved, while a conventional camera may record more raw material than the command team can review in time. Sky Hub changes the workflow by processing camera and environmental feeds locally on the pole, producing de-identified event and status metadata for a police common-operating-picture command view. The pole is a pure smart pole, not a lighting asset: it hosts sensing, compute, battery storage, solar replenishment, autonomous drone support and ground robot support, with no lighting system. For Cairo’s temporary-event model, that distinction matters because the node can be placed for operational coverage rather than tied to existing utility locations.
2. Review Question: What Slowed Evidence Collection?
The review scenario starts with a crowded evening event near a cultural-tourism route. A small perimeter breach, crowd compression near a gate, or movement around a restricted service lane may require a police assessment. The incident question is practical: how can the police event team obtain usable situational evidence quickly enough to choose the right response? In the proposed deployment, the Sky Hub pole performs local perception for anonymous vehicle count, crowd density, intrusion and perimeter awareness. Raw video and raw sensor data remain on the pole. The command view receives event metadata, device status, mission logs and operator-approved response options. This supports PDPL-LGPD-oriented handling because the system is designed around local processing and data minimization, not continuous raw upload. The KPI is response time, framed as a target evaluation metric rather than a claimed result. The buyer can measure the time from pole event flag, to operator assessment, to authorized drone sortie or ground robot tasking, to evidence package review. The case does not assert achieved detection rates, live deployment quantities or coverage areas. Instead, it defines the operational test: during a temporary night-economy event, does the pole help police reduce avoidable waiting, remove unnecessary manual search loops, and keep the evidentiary trail clearer? The incident-review structure also supports accountability. Each action has a mission log, battery state, task queue reference and human authorization marker, so the response record can be reviewed after the event.
3. Proposed Node Configuration Around the Event
A Cairo temporary-event layout would use Sky Hub as an off-grid micro-station placed near control points, pedestrian funnels or service-access edges. Each pole carries about 15 square meters of 360-degree wrapped flexible CIGS thin-film over a vertical body roughly 8 meters tall and 0.6 meters wide, giving about 2.4 to 2.7 kWp nameplate. Because a vertical cylinder collects direct sun mainly on its sun-facing projection, the planning model should treat solar as replenishment, not unlimited self-sufficiency. In a high-irradiance region, realistic clear-sky output is about 0.8 to 1.1 kW DC peak, usually peaking mid-morning or afternoon rather than at noon, with roughly 6 to 9 kWh per day. Cairo engineering review should validate shade from buildings, event structures, dust maintenance and seasonal sun angle. High-power drone and robot tasks are buffered by 5 to 20 kWh-class storage and scheduled by duty cycle. The module focus is the drone battery hot-swap system. A landed drone returns to the pole, docks for a rear-service automated battery exchange, receives a charged pack from the multi-bay magazine, and can relaunch for the next authorized task. Multiple bays support several consecutive sortie slots, useful when night patrol requires repeated short evidence-gathering passes rather than one long flight. The same pole also manages route planning, charge and swap state, task queueing, fleet health and mission logs. A humanoid or service robot can patrol at ground level, respond to alarms, inspect access points, coordinate with the aerial view and return to the pole base for wireless charging. This creates a field node that supports police review without needing grid, city or site power at the installation point.
4. Detect, Decide, Act, Record
The operations loop follows sensing, authorized assessment and response, edge-compute scheduling, then field operations and maintenance inside a single common-operating-picture command view. During a night-patrol incident, the pole’s PTZ camera and local perception model flag a relevant anomaly, such as crowd-density change near a gate, vehicle buildup near a restricted lane or intrusion into a temporary perimeter. The edge module schedules inference and mission-support workloads locally, keeping raw feeds on the pole. The command operator receives an event card with location reference, time marker, confidence band, environmental context and recommended response options. For drone operations, the operator can authorize a route, inspection angle and evidence task. For ground response, the operator can direct the service robot to approach a defined checkpoint, capture local status and coordinate with the aerial perspective. Counter-UAS coordination remains non-lethal and human-authorized. If an unauthorized drone is detected and tracked through pole sensing or optional partner-sensor input, the node can command its own friendly drone to perform a soft aerial net-capture or close-approach deterrence after authorization. Radar is not built into the pole; it may only be treated as an optional external input where a partner system is approved. The incident record is not a raw-data dump. It is a structured package of de-identified event metadata, mission logs, battery-swap state, operator decisions, sensor summaries and retained local evidence references governed by the event’s retention policy. This is how the pole supports evidence collection: by turning a fast-moving night incident into a reviewable chain of local observations and authorized actions.
5. Evaluation Method For Police Buyers
For a police stakeholder, the most credible evaluation is not a product datasheet but an incident-after-action test. Before the event, the buyer defines the target patrol routes, temporary restricted zones, evidence categories, authorization rules and retention policy. During the event, the command team measures response-time stages without claiming generalized performance: event flag to operator review, review to authorized task, task to field confirmation, and field confirmation to incident package. The battery-swap module should be evaluated by continuity of patrol, not by a single endurance claim. The practical question is whether consecutive sortie slots can maintain aerial availability during peak night-economy periods while storage and solar replenishment are managed within safe duty cycles. The ground robot function should be assessed for tasks that reduce manual exposure or repeated walking: inspection of temporary barriers, response to non-critical alarms, and coordination at entrances where an aerial view alone is not enough. The Cairo case should also include operational limits. Old-city streets can introduce occlusion, multipath communication issues and crowd-management constraints. Heritage zones may require strict placement rules. Weather, dust and cleaning intervals affect solar yield and optics. Final engineering confirmation should therefore include site walk-throughs, permission mapping, airspace review, data-handling review, and a written human-authorization procedure for any drone or C-UAS response. Within those limits, the proposed Sky Hub configuration gives police a temporary, off-grid physical-AI node for night patrols focused on evidence collection and response-time discipline.
System Configuration
| Parameter | Configuration |
|---|---|
| Pole form | SOLARTODO Sentinel Sky Hub, pure non-lighting smart pole for temporary cultural-tourism event patrol |
| Energy system | Fully off-grid battery-backed micro-station with 360-degree wrapped flexible CIGS replenishment and 5 to 20 kWh-class storage |
| Solar planning basis | About 15 m2 CIGS wrap, about 2.4 to 2.7 kWp nameplate, realistic high-irradiance clear-sky output around 0.8 to 1.1 kW DC peak and 6 to 9 kWh per day |
| Edge AI compute | Jetson-class Orin- or Thor-class edge module for on-pole inference, workload scheduling and local event processing |
| Camera and sensing | PTZ camera with local perception for anonymous vehicle count, crowd density, intrusion and perimeter awareness; nine-parameter environmental monitoring |
| Drone support | Autonomous route tasking, launch, return, mission logging and multi-bay rear-service battery hot-swap for consecutive authorized sorties |
| Robot and C-UAS coordination | Ground service robot patrol and wireless charging at pole base; non-lethal human-authorized C-UAS coordination using detection, tracking and friendly-drone response |
How It Works
- On-pole PTZ perception flags a crowd-density shift, intrusion or restricted-lane anomaly during the night patrol.
- Edge AI classifies the event locally and sends only de-identified status metadata to the police command view.
- A human operator reviews the event card, checks mission options and authorizes drone or ground robot response.
- The drone launches or relaunches after battery hot-swap, captures the assigned inspection view and returns to the pole.
- The node records mission logs, battery-swap state, operator decisions and local evidence references for incident review.
- Field teams receive a concise evidence package and response status without raw video leaving the pole by default.
Planning Assumptions (Indicative)
Illustrative planning inputs a buyer can recompute — target metrics, not achieved results. Subject to final engineering confirmation.
| Metric | Planning assumption | Indicative value |
|---|---|---|
| Response-time evaluation | Buyer measures target workflow from pole event flag to operator-authorized field action during night-economy patrol | 4 review stages tracked per incident |
| Patrol continuity | Battery hot-swap supports repeated short evidence sorties during peak event windows without relying on a single long flight | 3 to 5 consecutive sortie slots planned per node |
| Manual search reduction | Aerial and ground robot tasks replace repeated manual checks of temporary gates, service lanes and perimeter edges | 10 to 20 routine checks automated per event night |
| Evidence package quality | Incident review uses local event metadata, mission logs, sensor summaries and operator authorization records instead of broad raw-feed transfer | 1 structured package per reviewed incident |
| Energy duty-cycle planning | High-power tasks are scheduled against battery state, solar replenishment window and mission priority | 5 to 20 kWh-class storage envelope per node |
Deployed Equipment
- SOLARTODO Sentinel Sky Hub pole body with integrated off-grid battery cabinet
- 360-degree wrapped flexible CIGS thin-film solar replenishment layer
- PTZ camera with local perception functions
- Nine-parameter environmental sensor suite
- Jetson-class on-pole edge compute module
- Autonomous drone docking and multi-bay battery hot-swap module
- Ground service robot wireless charging base
- Common-operating-picture command software for police event operations
Frequently Asked Questions
Is this proposed Cairo deployment a lighting upgrade?
No. SOLARTODO Sentinel Sky Hub is a pure smart pole and physical-AI edge node with no lighting system. The proposed Cairo configuration is placed for police night-economy patrol, evidence collection, drone operations, robot support, environmental monitoring and edge processing. It should be planned as an operational node, not as a lighting asset.
How does the battery hot-swap module help police evidence collection?
Night patrol often requires repeated short aerial checks, especially when a crowd moves between gates, alleys and temporary barriers. The multi-bay battery magazine lets a returned drone receive a charged pack through an automated rear-service exchange and relaunch for another authorized sortie. This supports continuity of evidence gathering without treating one flight as the whole mission.
What data leaves the pole during the incident workflow?
The intended data posture is local processing first. Raw video and raw sensor data stay on the pole for local inference and evidence handling under the event policy. The command view receives de-identified event metadata, device status, mission logs and operator decision records. This is PDPL-LGPD-oriented design language, not a claim of certification.
Can the pole identify faces or read vehicle plates?
No active deployed capability is claimed for face recognition or licence-plate recognition in this case study. The security sensing scope is anonymous vehicle count, crowd density, intrusion and perimeter awareness. That scope is better aligned with temporary-event evidence triage, local processing and privacy-oriented deployment rules for cultural-tourism zones.
Does the system depend on city power at the event location?
No. The proposed node is designed as a fully off-grid battery-backed micro-station with on-pole CIGS solar replenishment. Solar is treated realistically as a supplemental replenishment layer, not unlimited self-sufficiency. Drone and robot tasks are buffered by storage and scheduled by duty cycle after site-specific engineering confirmation.
How is counter-UAS handled in a police event scenario?
Counter-UAS coordination is non-lethal and human-authorized only. The pole may detect and track an unauthorized drone through its own sensing or approved optional partner-sensor input, then command a friendly drone for soft aerial net-capture or close-approach deterrence after authorization. The case excludes shoot-downs, jamming, denial methods and autonomous attack.
Explore Further
- City AI Pole / smart streetlight product line
- More smart-city deployment cases
- Talk to our engineering team
Planning a similar physical-AI deployment for streets, campuses or public spaces? Request an engineering consultation