
A City AI Pole is a fully off-grid physical-AI edge node that combines local sensing, edge compute, battery-backed solar replenishment, drone operations and robot operations in a non-lighting pole form. In this Muscat configuration, SOLARTODO Sentinel Sky Hub supports holiday night patrol at old-town river-cross-section points by processing evidence locally and sharing only de-identified event and status metadata.
1. Pilot Context: Old-Town Muscat, Holiday Nights and River-Cross-Section Evidence
This pilot-report configuration is written for an eco-environment stakeholder responsible for old-town night-patrol operations in Muscat, Oman. The focus is not traffic lighting, streetscape decoration or a generic smart-city showcase. The city task is narrower and more operational: place physical-AI edge nodes at selected river-cross-section points where environmental incidents, after-hours movement, crowding, dumping, noise, smoke, dust or unauthorized access may need to be documented during holiday periods.
Old-town Muscat presents a practical monitoring challenge. Patrol teams may need to cover waterfront edges, wadis, drainage crossings, heritage-adjacent public space, service lanes and perimeter points after dark, when manual evidence collection is harder to standardize. A holiday trigger changes the operating pattern: more visitors, longer evening activity, temporary service loads, and a higher need for clear records that can be reviewed without over-collecting personal data.
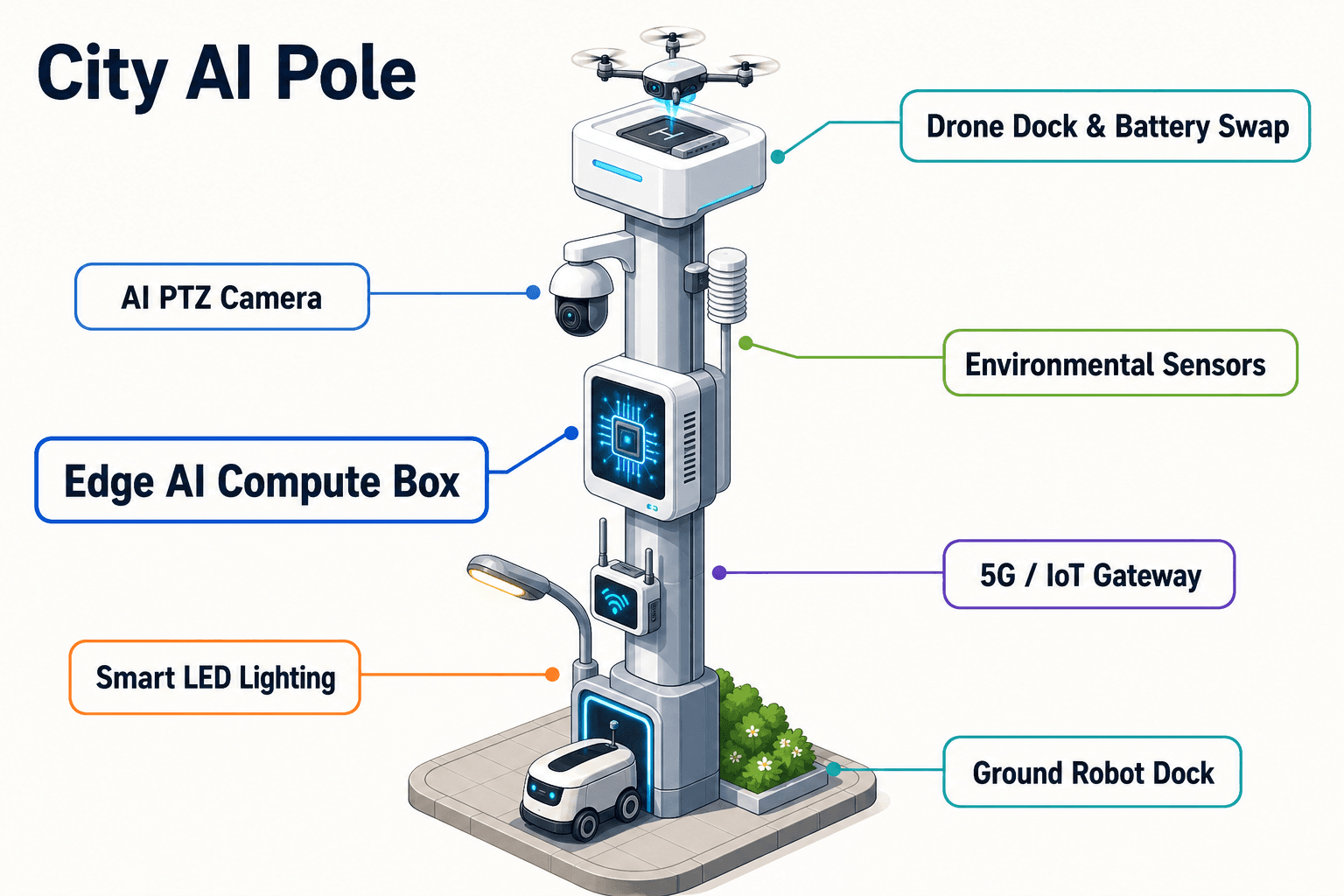
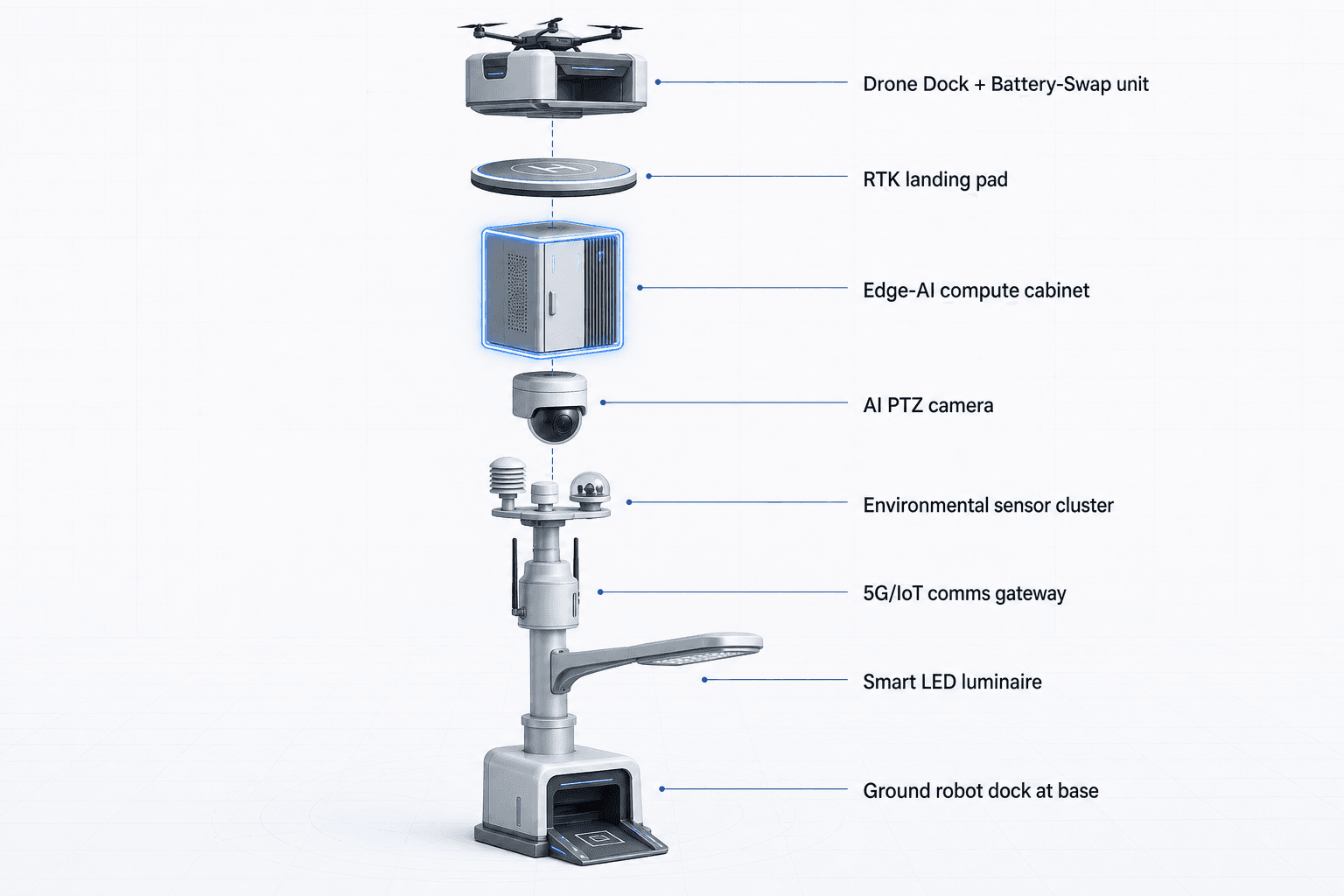
The proposed SOLARTODO Sentinel Sky Hub configuration uses the city-ai-pole category as an urban edge node, not as a lighting asset. Each Sky Hub is a PURE smart pole with no lighting system. Its role is to host sensing, compute, energy storage, drone operations, robot operations and evidence workflow coordination in a single off-grid micro-station.
The pilot is subject to final engineering confirmation, especially for site selection, wind exposure, solar yield, radio planning, drone flight permissions, ground-robot route safety and local operating procedures. The intent is to define a credible deployment pattern and evaluation framework, not to claim achieved results.
2. Deployment Pattern: River-Cross-Section Nodes as Local Evidence Stations
The proposed deployment mode is river-cross-section: Sky Hub nodes are positioned at selected cross-section observation points where an eco-environment team wants repeatable evidence from both banks, crossing approaches or adjacent service corridors. In Muscat, this can mean old-town drainage channels, wadi-adjacent routes, waterfront edges or controlled perimeter transitions where conditions change quickly at night.
A Sky Hub pole operates as a fully off-grid station. The pole carries about 15 square meters of 360-degree wrapped flexible CIGS thin-film solar across a vertical cylindrical body about 8 meters tall and about 0.6 meters wide. The solar layer is a replenishment layer, not an unlimited energy claim. In high-irradiance regions, realistic clear-sky output for this vertical cylindrical format is roughly 0.8 to 1.1 kW DC peak, typically peaking mid-morning or afternoon rather than at noon, and about 6 to 9 kWh per day. High-power drone and robot tasks are buffered by 5 to 20 kWh-class storage and scheduled by duty cycle.
That energy design matters for old-town operations because many useful monitoring points are not convenient power sites. Pulling power to every cross-section would add approvals, site works and maintenance interfaces. The Sky Hub avoids dependency on grid, city or site power while still requiring disciplined duty-cycle planning.
At each node, the on-pole common-operating-picture view presents the operations loop as sensing, authorized assessment and response, edge-compute scheduling, and field operations and maintenance. This supports the Chinese operating idea of sensing, checking, response planning and coordination as one loop, while keeping human authorization in the decision path.
3. Edge-Compute Workflow: Local Processing Before Any Metadata Leaves the Pole
The core module focus for this Muscat configuration is edge compute. A Jetson-class edge module, in an Orin- or Thor-class performance tier, runs local inference, event scoring and workload scheduling inside the pole. Raw video and sensor streams stay on the pole and are processed locally. Only de-identified event metadata, status metadata, logs and approved evidence packages may leave the node according to the operating policy.
For the eco-environment stakeholder, this changes the evidence-collection workflow. Instead of collecting continuous raw video centrally and reviewing it later, the pole classifies operationally relevant events at the edge: anonymous vehicle count, crowd density change, intrusion or perimeter awareness, abnormal noise trend, dust change, wind direction shift, illuminance change, and mission status from drone or robot operations. The system is PDPL/LGPD-oriented by design, meaning it is designed for local processing and data minimization. This is not a claim of certification or already verified regulatory compliance.
A night-patrol scenario may start with a PTZ camera detecting activity near a river-cross-section access path while environmental sensors show elevated noise and particulate readings. The edge module scores the event, schedules the PTZ to hold the scene, and presents a de-identified alert in the command view. A human operator can authorize a drone sortie for overhead inspection or dispatch a ground robot for closer observation along a permitted route.
The point is not to replace accountability with automation. The point is to make the first evidence package more consistent: time, node status, environmental readings, sensor snapshot, mission decision, operator authorization, drone or robot task log, and closure note. This reduces avoidable night-patrol repetition and supports better review quality.
4. Night-Patrol Operations: Drone, Robot and C-UAS Coordination
During holiday night-patrol periods, Sky Hub is configured as a robot-ready and drone-ready edge node. Drone operations include launch, regional patrol, inspection, return and task redeployment for autonomous sorties with no operator stationed at the pole. A multi-bay battery magazine performs automated rear-service battery exchange after landing, allowing a drone to receive a charged pack and relaunch. Multiple bays support several consecutive sorties within the operating plan.
Drone operations management is handled through route planning, charge and swap state management, task queueing, fleet health and mission logs. The edge module schedules workloads so that environmental sensing, camera analytics, drone tasks and robot tasks do not compete blindly for power or compute.
Ground robot operations add a second layer for close-range evidence. A humanoid or service robot can perform autonomous patrol, alarm response, inspection, air-ground coordination, and return to the pole base for wireless charging. In an old-town setting, this is useful when a drone view is insufficient and a route-level observation is needed without sending a team immediately into a low-visibility area.
Counter-UAS coordination is handled cautiously. The pole detects and tracks an unauthorized drone using its local sensing and any approved optional partner-sensor inputs. Radar is not built into the pole; it may only be considered as an optional or partner-sensor input. After human authorization, the node may command its own friendly drone to perform soft aerial net-capture or close-approach deterrence. The mitigation approach is non-lethal and human-authorized, with no autonomous attack.
5. Evaluation Framework: Opex-Oriented Planning, Not Claimed Results
The opex framing for the Muscat pilot is about operating effort, patrol repetition, evidence review workload and field dispatch discipline. This report does not claim achieved performance, detection rates, coverage area, customer endorsement, certification or rollout scale. It provides planning assumptions that a buyer can adjust during engineering, permitting and operational design.
For the eco-environment team, the evaluation should compare current night-patrol practice with a node-supported workflow. Useful indicators include how many routine patrol passes can be automated, how many environmental alerts are closed with sufficient evidence at the first review, how often a human dispatch is avoided because the drone or robot collected adequate context, and how consistently de-identified event records are produced.
Because the system is fully off-grid, the evaluation should also include energy discipline: daily solar replenishment, storage reserve, drone sortie duty cycle, robot patrol duty cycle, and weather or dust conditions affecting solar output. The 360-degree CIGS wrap improves all-around exposure, but the sun-facing projection governs real output at any given moment. The buyer should treat solar as supplemental replenishment for a battery-backed micro-station, not as permission to run every high-power module continuously.
A credible Muscat evaluation ends with an operating decision: which cross-section points justify permanent node service, which patrol tasks remain manual, which event types require human escalation, and which metadata fields are sufficient for eco-environment evidence collection without moving raw video off the pole.
System Configuration
| Parameter | Configuration |
|---|---|
| Pole form | SOLARTODO Sentinel Sky Hub PURE smart pole, non-lighting city-ai-pole edge node |
| Energy system | Fully off-grid battery-backed micro-station with 360-degree flexible CIGS solar replenishment |
| Edge AI compute | Jetson-class on-pole inference cabinet for local event scoring, workload scheduling and mission logs |
| Security sensing | AI PTZ camera for anonymous vehicle count, crowd density, intrusion and perimeter awareness |
| Environmental monitoring | Wind speed, wind direction, temperature, humidity, atmospheric pressure, noise, PM10, PM2.5 and illuminance |
| Drone and robot operations | Autonomous drone launch and battery hot-swap plus ground robot patrol and wireless charging at pole base |
| Data handling | Raw video and sensor data processed on-pole; only de-identified event and status metadata may leave the node |
How It Works
- On-pole PTZ and environmental sensors flag a night-time anomaly at a river-cross-section point.
- Edge AI classifies the event locally, scores priority and keeps raw video and sensor streams on the pole.
- A human operator reviews the de-identified alert in the common-operating-picture view and authorizes the response.
- The pole schedules a drone sortie, ground robot patrol or both, according to battery reserve and route permissions.
- Mission logs, environmental readings and de-identified event metadata are bundled into an evidence package for review.
- The operator closes, escalates or retasks the event while the node updates maintenance and energy status.
Planning Assumptions (Indicative)
Illustrative planning inputs a buyer can recompute — target metrics, not achieved results. Subject to final engineering confirmation.
| Metric | Planning assumption | Indicative value |
|---|---|---|
| Inspection labor | Drone patrol replaces routine manual night-patrol passes at selected river-cross-section points | ~10 to 20 patrol passes per week automated |
| Evidence review | Edge AI filters continuous sensing into de-identified event packages for operator review | ~30 to 60 event packages per week reviewed |
| Field dispatch discipline | Robot or drone first-look missions provide context before sending a field team | ~5 to 15 first-look missions per week |
| Energy duty cycle | High-power drone and robot tasks are scheduled against battery reserve and daily solar replenishment | ~6 to 9 kWh per day solar planning input |
| Holiday surge coverage | Night-patrol task queues are increased during holiday periods without adding on-site operators at each pole | ~2 to 3 priority windows per night |
Deployed Equipment
- SOLARTODO Sentinel Sky Hub non-lighting pole body
- Flexible CIGS solar wrap and battery storage cabinet
- On-pole edge AI compute module
- AI PTZ camera assembly
- Nine-parameter environmental sensor suite
- Autonomous drone bay with multi-bay battery hot-swap magazine
- Ground robot wireless charging interface
- OTATODO edge OS common-operating-picture console
Frequently Asked Questions
Is SOLARTODO Sentinel Sky Hub a smart streetlight?
No. Sky Hub is a PURE smart pole with no lighting system. In this Muscat configuration, it is treated as a city-ai-pole and physical-AI urban edge node for sensing, edge computing, drone operations, ground robot operations and evidence workflow coordination. It should not be specified as a lighting asset or procured as a street lighting replacement.
How does the fully off-grid energy design work in Muscat conditions?
The pole combines battery storage with about 15 square meters of 360-degree wrapped flexible CIGS thin-film solar replenishment. For this vertical cylindrical form, realistic clear-sky output is planned as roughly 0.8 to 1.1 kW DC peak and about 6 to 9 kWh per day in high-irradiance conditions. Drone and robot tasks still require duty-cycle scheduling against storage reserve.
What data leaves the pole during an eco-environment night-patrol event?
The intended data-handling pattern is local processing first. Raw video and sensor streams stay on the pole, where edge AI performs inference, event scoring and evidence packaging. Only de-identified event metadata, status metadata, mission logs and approved evidence summaries may leave the node, subject to the buyer's operating policy and final legal review.
Can the system support holiday surges without an operator stationed at each node?
Yes, the proposed configuration is designed for unattended node operation with remote human authorization. During holiday periods, task queues can prioritize river-cross-section patrols, environmental anomaly checks, drone first-look missions and ground robot follow-up. Human operators remain responsible for authorization, escalation and closure decisions through the common-operating-picture view.
What is the role of edge compute in evidence collection?
Edge compute reduces the need to move continuous raw data into a central system for first review. The on-pole module classifies local events, schedules camera, drone and robot workloads, and produces de-identified evidence packages. This supports more consistent records for eco-environment teams while keeping sensitive raw streams at the node.
How is counter-UAS coordination handled in this configuration?
The pole can detect and track an unauthorized drone through its own sensing and approved optional partner-sensor inputs. Radar is not built into the pole. Any mitigation is human-authorized and non-lethal, such as commanding the friendly drone to perform soft aerial net-capture or close-approach deterrence under defined operating rules.
What should the buyer evaluate before moving from pilot configuration to permanent service?
The buyer should confirm cross-section site suitability, flight permissions, robot route safety, communications planning, solar exposure, storage reserve, environmental sensor calibration, evidence retention policy and human authorization workflow. The most important evaluation question is whether the node improves patrol consistency and evidence quality without creating unnecessary raw-data movement.
Explore Further
- City AI Pole / smart streetlight product line
- More smart-city deployment cases
- Talk to our engineering team
Planning a similar physical-AI deployment for streets, campuses or public spaces? Request an engineering consultation