
Un poste urbano de IA, en este caso SOLARTODO Sentinel Sky Hub, es un nodo urbano físico de IA en el edge totalmente sin conexión a la red: un poste inteligente sin iluminación con almacenamiento en baterías, recarga solar CIGS envolvente de 360°, computación en el edge, sensórica, operaciones con drones y soporte de robots terrestres. Esta configuración para Kuala Lumpur respalda la respuesta nocturna a incidentes de tráfico en un corredor portuario con procesamiento local y acciones de campo autorizadas por humanos.
Contexto del incidente: presión de la temporada de inundaciones sobre el corredor portuario de Kuala Lumpur
Durante la temporada de inundaciones, los equipos de gestión de emergencias en Kuala Lumpur enfrentan un patrón conocido: la intensidad de la lluvia aumenta después del anochecer, los arcenes se vuelven menos fiables, la visibilidad disminuye y pequeños incidentes en corredores de carga pueden convertirse en eventos multiagencia. La ciudad en sí está tierra adentro, pero el área más amplia del valle de Klang depende de los movimientos por carretera entre los distritos logísticos de Kuala Lumpur, las zonas industriales y la puerta de entrada de Port Klang. Cuando un vehículo pesado detenido, una colisión menor, escombros caídos o una obstrucción por agua de inundación aparece de noche, el primer problema no siempre es el evento en sí. El primer problema es la disponibilidad: si existe una imagen de campo verificada, un activo de respuesta desplegado y un punto de comunicaciones robusto sin esperar a que una cuadrilla llegue a la ubicación exacta.
Este caso de estudio plantea un despliegue propuesto e ilustrativo en corredor de SOLARTODO Sentinel Sky Hub para una parte interesada de gestión de emergencias en Kuala Lumpur. El arquetipo de corredor está vinculado al puerto, no enfocado en servicios urbanos del centro: los nodos seleccionados se ubicarían en puntos de congestión del tráfico, accesos propensos a inundaciones, entradas logísticas, vías perimetrales y áreas de preparación donde los equipos de respuesta necesitan visión, computación y acción robótica fuera del horario diurno. El objetivo no es reemplazar a los servicios de emergencia ni a las autoridades de control de tráfico. Es proporcionar una capa física persistente de IA en el edge que pueda detectar una condición anómala de tráfico, apoyar la evaluación humana, desplegar un robot terrestre o un dron aliado y registrar el paquete de revisión del incidente desde el propio nodo.
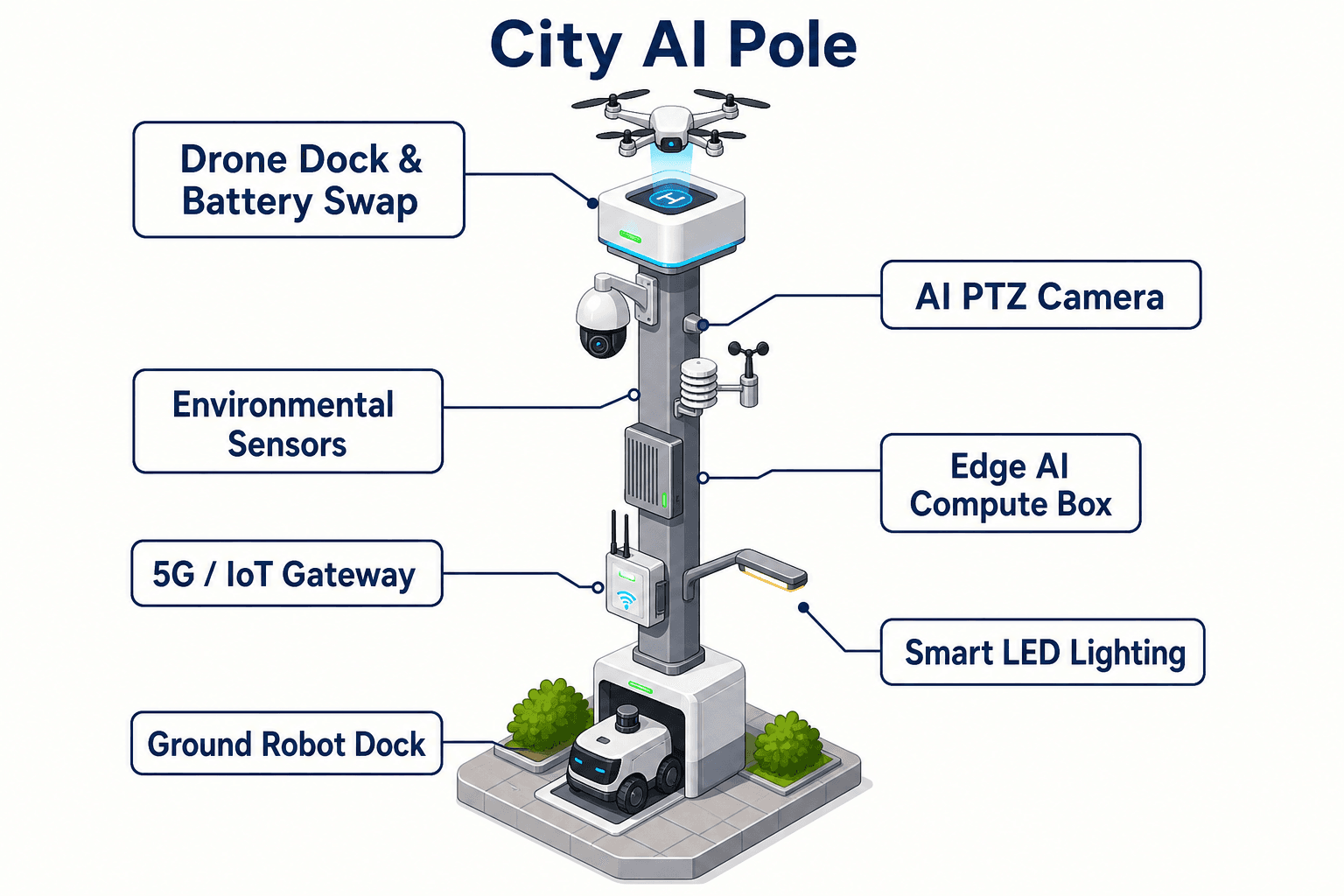
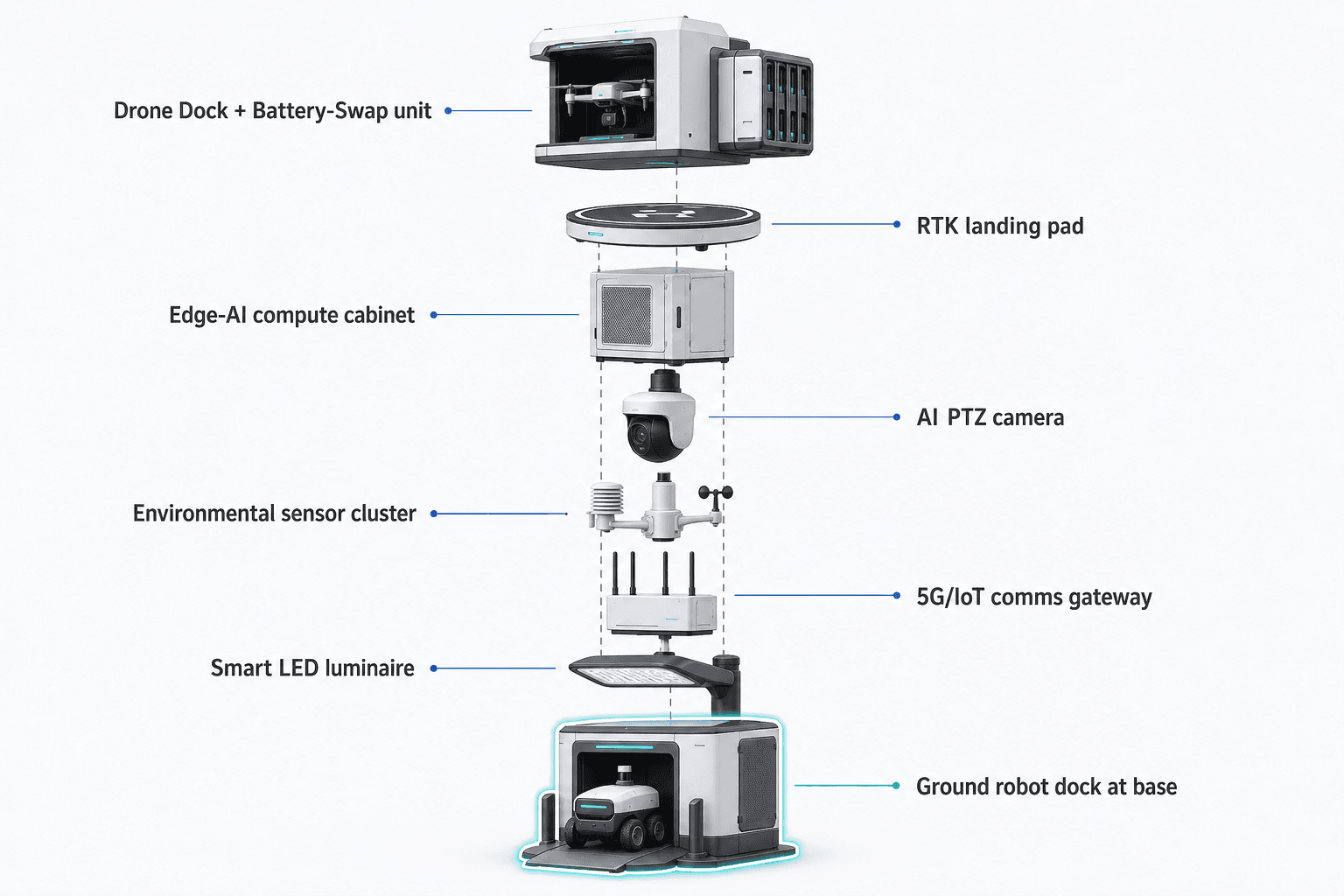
Sky Hub se posiciona aquí como un poste inteligente PURE, no como un activo de iluminación. No tiene sistema de iluminación. El poste funciona como una microestación sin conexión a la red con almacenamiento en baterías, recarga mediante película delgada CIGS flexible envolvente de 360°, inferencia en el poste, sensórica ambiental, sensórica de seguridad PTZ, operaciones autónomas con drones, intercambio rápido de baterías de drones, carga de robots terrestres y una vista de mando de imagen operativa común. En un corredor durante la temporada de inundaciones, la pregunta de diseño es directa: ¿puede cada nodo mantenerse disponible durante las ventanas de respuesta nocturna cuando las cuadrillas, los vehículos y el acceso a energía están restringidos? Por tanto, el encuadre de KPI propuesto se centra en la disponibilidad objetivo, la continuidad de salidas, la preparación del robot, la integridad de la revisión de incidentes y el porcentaje de eventos en los que solo los metadatos desidentificados deben salir del poste.
Revisión del flujo de trabajo de incidentes de tráfico
El escenario de revisión de incidentes comienza con una anomalía de tráfico nocturna en una vía de acceso al puerto. Un vehículo se detiene en una posición insegura después de una lluvia intensa, el tráfico circundante empieza a comprimirse y la profundidad del agua cerca del arcén se vuelve incierta. Una respuesta convencional puede depender de la llamada de un usuario de la vía, de un vehículo patrulla que pase por el lugar o de señales de cámaras fijas que quizá no proporcionen contexto ambiental local. En la configuración de corredor de Sky Hub, el nodo más cercano ejecuta continuamente percepción local sobre la señal de su cámara PTZ y sus instrumentos ambientales. Puede identificar cambios anónimos en el conteo de vehículos, acumulación de congestión, intrusión en una zona restringida del arcén, densidad de personas alrededor de un vehículo detenido y movimiento perimetral cerca de una línea de vallado logístico. No requiere que el video en bruto se cargue para la evaluación normal del evento.
Una vez que el módulo edge en el poste puntúa la anomalía, el incidente entra en la vista de imagen operativa común utilizada por los operadores de gestión de emergencias. El sistema respalda el ciclo operativo descrito como detección, evaluación y respuesta autorizadas, programación de computación en el edge, y operaciones y mantenimiento en campo. Esto es importante para las operaciones de Kuala Lumpur durante la temporada de inundaciones porque la decisión rara vez es binaria. El operador puede necesitar decidir si la escena es solo una avería, una colisión que requiere despliegue, un bloqueo por agua de inundación, una intrusión de seguridad cerca del corredor o un evento mixto que requiere coordinación de tráfico, rescate, seguridad portuaria y mantenimiento.
El flujo de trabajo centrado en robots pasa entonces de la observación a la acción de campo. Un robot humanoide o de servicio desplegado en la base del poste puede ser liberado para patrulla autónoma, inspección cercana, respuesta a alarmas y coordinación aire-tierra. Puede aproximarse a la escena, inspeccionar alrededor de barreras, comprobar si hay personas cerca del vehículo detenido, evaluar el movimiento visible del agua y regresar a la base para carga inalámbrica. El dron aliado puede despegar para inspección elevada del corredor, observación del tráfico aguas arriba o reconocimiento de aguas de inundación. El foco clave del módulo es el intercambio de baterías: cuando el dron regresa, un cargador multibahía de servicio trasero realiza el intercambio automatizado del paquete agotado por uno cargado, permitiendo salidas consecutivas sujetas a autorización del operador, límites meteorológicos y programación del ciclo de trabajo.
Esto importa más de noche. Un solo vuelo de dron puede verificar un incidente, pero la disponibilidad repetida es lo que cambia el flujo de trabajo de gestión de emergencias. Si la primera salida confirma un vehículo detenido, la segunda puede comprobar la cola aguas arriba, la tercera puede verificar un punto de desvío y una salida posterior puede confirmar que la recuperación se ha completado. Como el nodo programa localmente la energía, la computación y los activos de campo, puede priorizar tareas de incidentes por encima de patrullas rutinarias y conservar suficiente reserva para el retorno del robot, la salud del sistema, las comunicaciones y el empaquetado de evidencias.
Diseño del nodo sin conexión a la red y planificación de disponibilidad
El nodo Sky Hub propuesto está diseñado como una estación totalmente sin conexión a la red: utiliza almacenamiento en baterías con recarga solar en el poste y no depende de la red eléctrica, la ciudad ni la energía del emplazamiento. El cuerpo del poste lleva alrededor de 15 m² de película delgada CIGS flexible envolvente de 360° sobre una forma cilíndrica vertical de unos 8 m de alto y aproximadamente 0.6 m de ancho. El rango de potencia nominal es de aproximadamente 2.4 a 2.7 kWp, pero la hipótesis práctica de ingeniería es más conservadora. Un cilindro vertical capta sol directo en la proyección orientada al sol, no en toda la envolvente a la vez. En regiones de alta irradiancia y cielo despejado, la salida realista es de aproximadamente 0.8 a 1.1 kW DC pico, normalmente con picos a media mañana o media tarde en lugar de al mediodía, con unos 6 a 9 kWh por día.
Las condiciones tropicales de Kuala Lumpur requieren una postura de planificación aún más disciplinada porque la lluvia, la humedad, la nubosidad y el clima de temporada de inundaciones pueden reducir la recarga. Por tanto, la capa CIGS debe tratarse como recarga suplementaria para una microestación respaldada por baterías, no como una promesa de operación solar ilimitada. El diseño utiliza almacenamiento de clase 5 a 20 kWh, seleccionado tras la ingeniería del sitio, la frecuencia de misión y el modelado de horas de reserva. Las tareas de drones y robots se amortiguan mediante almacenamiento y se programan por ciclo de trabajo, con la vista de mando mostrando estado de batería, estado del cargador de intercambio, estado de carga del robot, carga de cómputo y prioridad de la cola de misiones.
Para un comprador de gestión de emergencias, la disponibilidad no es un eslogan; es una métrica de planificación. El modelo de planificación objetivo debe definir cuántos nodos deben estar listos durante las noches de temporada de inundaciones, cuántas salidas consecutivas de drones se requieren antes del servicio manual, con qué frecuencia un robot debe poder salir y regresar, y qué reserva debe permanecer después de un incidente de tráfico de alta prioridad. El cargador de intercambio de baterías ayuda a la disponibilidad porque separa la continuidad de las misiones del dron de la carga lenta de un único paquete. Varias bahías cargadas permiten varias salidas consecutivas mientras el nodo gestiona ciclos de recarga, límites térmicos y reserva restante.
La misma lógica de disponibilidad se aplica al manejo de datos. Los flujos de video en bruto y sensores permanecen en el poste para procesamiento local. Solo los metadatos de eventos y estado desidentificados pueden salir del nodo hacia la vista de mando, informes o integración con sistemas de gestión de emergencias. Este enfoque orientado a PDPL/LGPD reduce la dependencia del ancho de banda durante mal tiempo y apoya la planificación de privacidad desde el diseño, mientras permanece sujeto a confirmación legal, de ciberseguridad y de ingeniería final para el despliegue específico en Malasia.
Respuesta liderada por robots con soporte de intercambio de baterías de drones
El valor operativo diferenciado de este diseño de corredor de Kuala Lumpur es la combinación de respuesta con robot terrestre y continuidad mediante intercambio de baterías de drones. El robot terrestre es el respondedor de corto alcance: puede salir de la base del poste, inspeccionar el borde inmediato de la carretera, acercarse a un vehículo detenido a una distancia controlada, revisar una entrada de drenaje o barrera y proporcionar al operador estado local sin enviar como primer paso a un respondedor humano a condiciones de baja visibilidad. Puede coordinarse con el dron aliado en altura, usando el contexto aéreo para elegir una ruta más segura o confirmar si el área del incidente se está expandiendo.
El dron es el explorador regional rápido. Puede despegar desde el nodo, patrullar el segmento del corredor, inspeccionar el tráfico aguas arriba y aguas abajo, regresar para intercambio de batería y volver a despegar para tareas de seguimiento. El proceso de hot-swap es automatizado y de servicio trasero: después del aterrizaje, el cargador multibahía intercambia la batería agotada por un paquete cargado. Esto respalda la revisión repetida de incidentes durante la temporada de inundaciones sin un operador en sitio, sujeto a autorización de misión y restricciones meteorológicas. El valor no es solo un mayor tiempo de vuelo; es una interrupción operativa más corta entre ciclos de evaluación.
La coordinación contra UAS se incluye como una función de seguridad controlada para zonas de infraestructura crítica cerca de instalaciones logísticas y vinculadas al puerto. El poste puede detectar y rastrear un dron no autorizado utilizando su propia sensórica y entradas opcionales de sensores de socios, incluido radar solo cuando sea suministrado externamente por un sistema de socio aprobado. El poste puede entonces comandar su propio dron aliado para una respuesta no cinética autorizada por humanos, como captura aérea suave con red o disuasión por aproximación cercana. Esto se plantea como coordinación bajo control del operador, no como escalamiento automático.
La monitorización ambiental del nodo también apoya las decisiones de robots y drones. Velocidad del viento, dirección del viento, temperatura, humedad, presión atmosférica, ruido, PM10, PM2.5 e iluminancia contribuyen al control de habilitación de misiones y al contexto del incidente. Si el viento o la lluvia hacen inadecuada una salida de dron, el robot puede permanecer como el activo principal de campo. Si el agua superficial o los escombros hacen inseguro el desplazamiento del robot, el dron puede proporcionar primero inspección aérea. Este patrón flexible aire-tierra es la razón por la que el sistema se evalúa mejor como un nodo físico de IA en el edge que como un sensor convencional montado en poste.
Modelo de evaluación para compradores de gestión de emergencias
El despliegue propuesto debe evaluarse mediante un método de revisión de incidentes en lugar de una prueba tecnológica genérica. Cada ubicación seleccionada del corredor debe evaluarse por su relevancia durante la temporada de inundaciones, distancia de respuesta, opciones de comunicaciones, seguridad física, exposición solar, movimiento seguro del robot, despeje para lanzamiento de drones, acceso de mantenimiento e integración con el flujo de trabajo de mando de la parte interesada. El comprador debe definir umbrales objetivo antes del despliegue: objetivo de tiempo activo del nodo, energía mínima de reserva, número de salidas de drones por ventana de respuesta nocturna, porcentaje de preparación del robot, integridad del paquete de evento a revisión y tiempo aceptable desde la señalización de anomalía hasta la decisión humana.
Aquí no se afirma ninguna cantidad de despliegue a escala nacional, área de cobertura o resultado de rendimiento logrado. Un programa creíble en Kuala Lumpur comenzaría por mapear segmentos prioritarios del corredor, seleccionar posiciones representativas de nodos y validar el modelo operativo bajo los requisitos locales de clima, espacio aéreo, seguridad vial y gobernanza de datos. La confirmación de ingeniería determinaría el tamaño final de almacenamiento, las hipótesis de rendimiento solar, el diseño de cimentación, la ruta de comunicaciones, el envolvente de rutas robóticas y el número de bahías del cargador de baterías necesarias para el ciclo de trabajo objetivo.
El paquete de revisión de incidentes es el resultado de gestión. Para cada evento de tráfico, el nodo puede preservar evidencia local, generar metadatos desidentificados, registrar decisiones del operador, registrar asignaciones de tareas de drones y robots, mostrar transiciones de estado del intercambio de baterías, documentar condiciones ambientales y resumir qué acción de campo ocurrió. Los equipos de gestión de emergencias pueden usar estos paquetes para revisar si se cumplieron los objetivos de disponibilidad, si los activos de respuesta se asignaron adecuadamente y si la cobertura del corredor debe ajustarse antes de la siguiente ventana de temporada de inundaciones.
Para un corredor de Kuala Lumpur vinculado al puerto, el beneficio estratégico es la continuidad operativa en el edge. El nodo brinda a los gestores de emergencias un punto local, sin conexión a la red, de sensórica, cómputo, acción aire-tierra y revisión. Lo hace sin afirmar autonomía solar ilimitada, sin enviar video en bruto fuera del poste como modelo operativo predeterminado, sin depender de plataformas de terceros nombradas y sin posicionarse como producto de iluminación. La pregunta práctica del comprador se vuelve medible: ¿qué incidentes del corredor requieren disponibilidad nocturna persistente y cuántos nodos Sky Hub se necesitan para mantener lista la respuesta de robots y drones cuando las condiciones de temporada de inundaciones hacen más difícil la primera verificación?
Configuración del sistema
| Parámetro | Configuración |
|---|---|
| Forma del poste | Poste inteligente PURE SOLARTODO Sentinel Sky Hub, cuerpo cilíndrico de nodo edge sin iluminación, aproximadamente 8 m de alto con envolvente CIGS de 360° |
| Sistema energético | Microestación totalmente sin conexión a la red respaldada por baterías, con almacenamiento de clase 5-20 kWh y recarga solar CIGS suplementaria, sujeto a ingeniería del sitio |
| Intercambio de baterías de drones | Cargador automatizado multibahía de baterías de servicio trasero para intercambio de paquetes cargados y salidas autorizadas consecutivas |
| Soporte de robot terrestre | Zona de carga inalámbrica lateral en la base para patrulla, inspección, respuesta a alarmas y operación de retorno a carga de robot humanoide o de servicio |
| Cómputo de IA en el edge | Módulo de inferencia en el poste de clase Jetson Orin o clase Thor para cargas de trabajo locales de video, sensores y programación de misiones |
| Paquete de sensórica | Percepción AI PTZ más velocidad del viento, dirección del viento, temperatura, humedad, presión, ruido, PM10, PM2.5 e iluminancia |
| Vista de mando | Panel de imagen operativa común para revisión de anomalías, gestión de colas de tareas, registros de misión, salud de flota, estado de batería y autorización humana |
Cómo funciona
- La percepción PTZ en el poste marca una anomalía de tráfico nocturna, acumulación de cola o intrusión en zona restringida cerca del corredor portuario.
- La IA en el edge puntúa el evento localmente y lo combina con lecturas meteorológicas, de calidad del aire, ruido e iluminancia.
- La vista de imagen operativa común presenta el evento a un operador de gestión de emergencias para autorización humana.
- El nodo despliega un robot terrestre y, si las condiciones lo permiten, lanza un dron aliado para inspección del corredor.
- El dron regresa para intercambio rápido automatizado de batería y puede redesplegarse para vistas de seguimiento mientras el robot vuelve a la carga inalámbrica.
- El nodo registra logs de misión, transiciones de estado de batería, decisiones del operador y metadatos desidentificados del incidente para revisión.
Supuestos de planificación (indicativos)
Datos de planificación ilustrativos que el comprador puede recalcular: métricas objetivo, no resultados logrados. Sujeto a confirmación final de ingeniería.
| Métrica | Supuesto de planificación | Valor indicativo |
|---|---|---|
| Disponibilidad de respuesta nocturna | Proporción objetivo de noches seleccionadas del corredor en las que cada nodo permanece listo para detección de incidentes, despliegue de robot y al menos una salida de dron | Objetivo de planificación de ~95% |
| Continuidad de salidas de drones | El cargador de intercambio de baterías respalda ciclos repetidos de inspección durante la temporada de inundaciones antes del servicio manual, sujeto a límites meteorológicos y de reserva | ~3-5 salidas autorizadas consecutivas por ventana de evento |
| Inspección de campo con robot | El robot terrestre realiza inspecciones iniciales para anomalías de tráfico seleccionadas de riesgo bajo a medio antes de que una cuadrilla humana entre en la escena | ~2-4 tareas de inspección automatizadas por ventana nocturna |
| Desplazamiento de patrullas manuales | Las revisiones rutinarias nocturnas del corredor se trasladan de patrullas vehiculares a patrullas programadas con drones y robots donde la normativa y las reglas de seguridad lo permitan | ~6-10 revisiones de patrulla automatizadas por semana |
| Integridad de revisión de incidentes | Cada evento marcado produce un paquete de registro local con metadatos desidentificados, historial de tareas, contexto ambiental y decisiones del operador | Objetivo de integridad de paquete de ~90% |
Equipos desplegados
- Nodo físico de IA en el edge con forma de poste SOLARTODO Sentinel Sky Hub
- Armario de energía sin conexión a la red respaldado por baterías con recarga CIGS flexible envolvente de 360°
- Cámara AI PTZ y stack de percepción local
- Paquete de monitorización ambiental de nueve parámetros
- Bahía de dron autónomo con cargador multibahía de intercambio rápido de baterías
- Base de carga inalámbrica para robot humanoide o de servicio
- Módulo de cómputo edge en el poste de clase Jetson
- Software de mando de imagen operativa común para operaciones autorizadas
Preguntas frecuentes
¿Este caso de estudio de Kuala Lumpur afirma un despliegue gubernamental activo?
No. Esta es una configuración propuesta e ilustrativa para un comprador de gestión de emergencias que evalúa la respuesta en corredores vinculados al puerto en el contexto de Kuala Lumpur y el valle de Klang. No afirma un cliente específico, cantidad de nodos, área de cobertura, tiempo de respuesta logrado ni resultado certificado. El alcance final del despliegue requeriría confirmación de ingeniería, legal, de espacio aéreo, de seguridad y de adquisiciones.
¿Por qué la disponibilidad es el KPI principal para este caso de uso de corredor?
Los incidentes nocturnos durante la temporada de inundaciones son difíciles porque la primera imagen de campo verificada puede llegar tarde, especialmente cuando la lluvia, la congestión y las condiciones de la vía ralentizan la respuesta manual. La disponibilidad mide si el nodo puede mantener en línea la sensórica, el cómputo, las salidas de drones, la preparación del robot, las comunicaciones y el registro de evidencias durante la ventana de respuesta. Es un mejor KPI de planificación que una única duración de vuelo o especificación de cámara.
¿Cómo mejora el intercambio rápido de baterías de drones la respuesta de emergencia?
El cargador de intercambio de baterías reduce la interrupción entre inspecciones aéreas. Un dron aterrizado puede recibir un paquete cargado mediante un intercambio automatizado de servicio trasero y luego redesplegarse para otra tarea autorizada. Para un incidente de tráfico, eso puede significar una salida para verificar el evento, otra para inspeccionar la cola aguas arriba y una salida posterior para confirmar la recuperación, todo gobernado por la reserva de energía y los límites meteorológicos.
¿Qué función cumple el robot terrestre en comparación con el dron?
El robot es el activo de inspección de corto alcance. Puede patrullar cerca del poste, acercarse a una zona de vehículo detenido a una distancia controlada, inspeccionar escombros, observar el agua a nivel de carretera y volver a carga inalámbrica. El dron proporciona un contexto aéreo más amplio. Juntos respaldan la coordinación aire-tierra, con el operador eligiendo el activo más seguro según el tipo de incidente, el clima y las condiciones de la ruta.
¿El video en bruto sale del poste para procesamiento?
El modelo operativo previsto mantiene el video en bruto y los datos de sensores en el poste para procesamiento local en el edge. La vista de mando puede recibir metadatos de eventos y estado desidentificados, como tipo de anomalía, estado de activos, lecturas ambientales y registros de misión. Este es un enfoque de diseño orientado a PDPL/LGPD, no una declaración de certificación legal completada ni de cumplimiento automático para cada sitio.
¿Sky Hub funciona solo con energía solar?
El sistema está totalmente sin conexión a la red, pero eso no significa operación ilimitada solo con energía solar. La envolvente CIGS de 360° es una capa de recarga suplementaria para una microestación respaldada por baterías. La salida práctica depende del ángulo solar, el clima y la exposición del sitio, por lo que las misiones de drones y robots se amortiguan mediante almacenamiento de clase 5-20 kWh y se programan por ciclo de trabajo.
¿Cómo se maneja la actividad de drones no autorizados cerca de infraestructura crítica?
El nodo puede respaldar detección, seguimiento y coordinación de mando para eventos de drones no autorizados, con autorización humana requerida para la mitigación. Su dron aliado puede asignarse a captura aérea suave con red o disuasión por aproximación cercana donde esté permitido. El radar no está integrado en el poste; solo puede considerarse como entrada opcional de sensor de socio en un diseño específico del sitio.
Explorar más
- Línea de postes City AI / alumbrado inteligente
- Más casos de despliegue de ciudad inteligente
- Hable con nuestro equipo de ingeniería
¿Planea un despliegue de IA física similar para calles, campus o espacios públicos? Solicite una consulta de ingeniería