
Un poste urbano de IA, en este escenario de Lisboa, es un nodo edge de IA física SOLARTODO Sentinel: un poste inteligente integrado que combina sensórica en el poste, inferencia edge-AI embebida, flujos de trabajo de comunicaciones resilientes, una base para dron y un robot de patrulla acoplado en la base. El despliegue propuesto apoya la vigilancia perimetral de gestión urbana alrededor del perímetro de un campus en el CBD durante estrés de red relacionado con una ola de calor.
Tarea en el CBD de Lisboa y necesidad interdepartamental
Este despliegue ilustrativo en Lisboa se plantea alrededor de una tarea de gestión urbana, no de una compra de producto: mantener una vigilancia perimetral fiable alrededor del perímetro de un campus municipal en el CBD cuando una ola de calor aumenta el estrés operativo y una interrupción de red limita la monitorización remota normal. El entorno objetivo es un distrito central denso, como un campus de servicios municipales, un patio de operaciones de movilidad, un perímetro administrativo, una interfaz de espacio público frente al agua o un activo municipal de uso mixto cerca de calles con alto tránsito peatonal. En este contexto, “vigilancia perimetral” significa vigilar el límite de un sitio gestionado por la ciudad: portones, vallas, entradas de servicio, carriles de entrega, bordes de aparcamiento y puntos perimetrales orientados al público.
El responsable no es un único equipo de seguridad. Un despliegue viable sería interdepartamental por diseño. La gestión urbana posee el objetivo de servicio y la disciplina presupuestaria. La seguridad municipal define las reglas de escalado. Los equipos de facilities son responsables de la energía, la ubicación de postes, el acceso a la base y las ventanas de mantenimiento. Los equipos de TI y comunicaciones definen el comportamiento de red durante la pérdida parcial o total del backhaul. Los equipos de movilidad y espacio público revisan cómo las rutas de patrulla del robot evitan peatones, rampas, bordillos, carriles bici y aglomeraciones nocturnas. Los revisores legales y de protección de datos definen qué se graba, conserva, enmascara o escala.
El detonante estacional es una ola de calor. En Lisboa, los periodos de altas temperaturas pueden extender la actividad exterior hasta horas más tardías, aumentar la presión sobre los corredores de transporte y elevar la importancia de operaciones perimetrales ininterrumpidas alrededor de activos urbanos. Una ola de calor también puede exponer debilidades en armarios de comunicaciones, planificación energética y disponibilidad de personal. El punto crítico en este caso es la interrupción de red: si una plataforma central de vídeo, un enlace de backhaul o una ruta cloud no está disponible, un modelo convencional de monitorización remota puede perder visibilidad justo cuando las condiciones operativas son menos tolerantes.
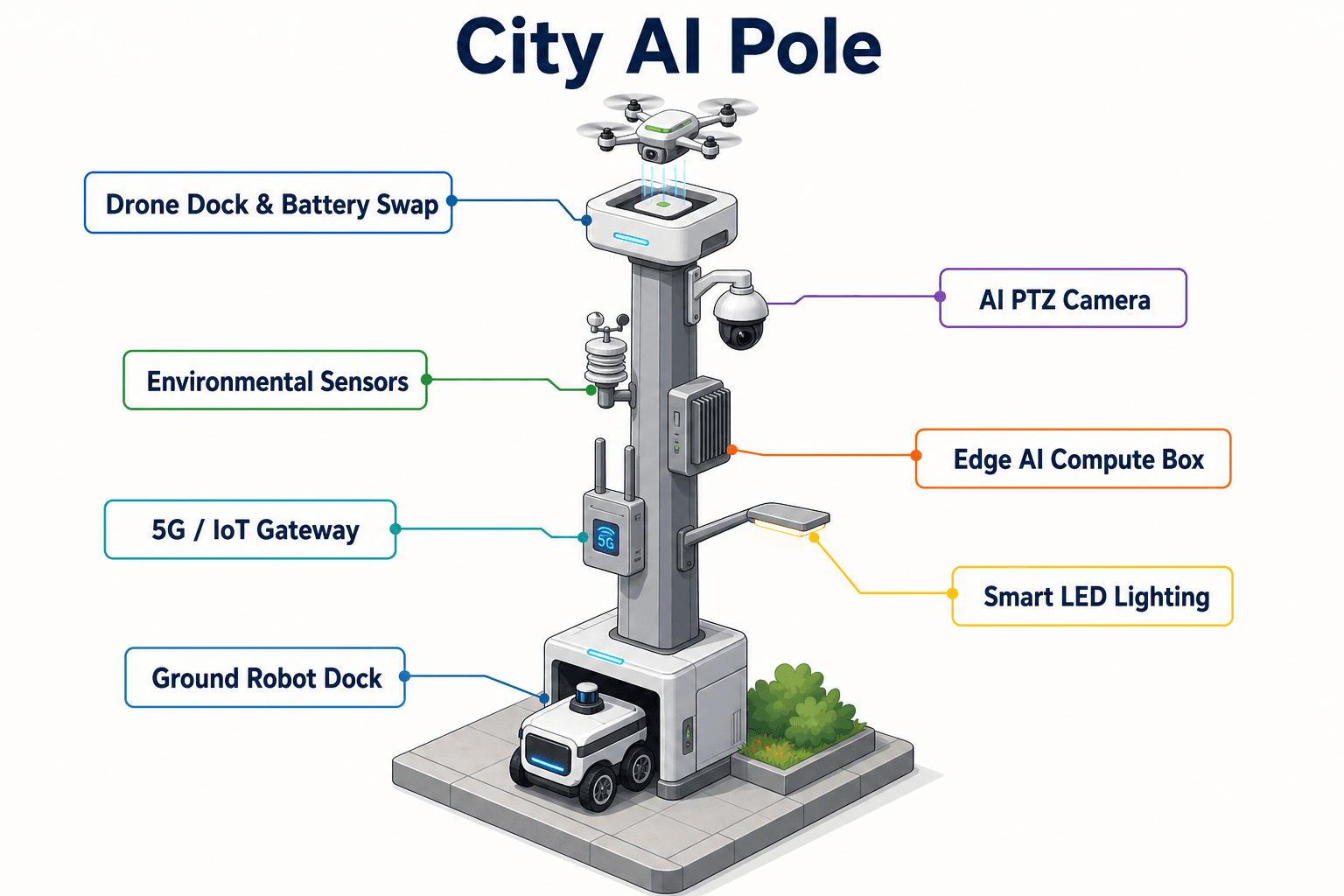
La respuesta propuesta es un despliegue de postes de nodo edge Physical-AI SOLARTODO Sentinel en el perímetro del campus. Cada nodo es un poste inteligente delgado, cilíndrico u octogonal, con cuerpo de metal cepillado, sección media fotovoltaica azul medianoche, anillos de acento LED cian, una base integrada para dron en la parte superior, una base para robot de patrulla al pie, sensórica en el poste e inferencia edge-AI embebida. El caso de estudio trata el poste como infraestructura urbana integrada. No se presenta aquí como un paquete autónomo de dron o robot; el robot y el dron son módulos dentro de un sistema configurable de nodo edge urbano, sujeto a confirmación final de ingeniería.
Vigilancia perimetral liderada por robot en condiciones de interrupción
El módulo operativo principal en este caso es el robot de patrulla. El robot está acoplado en la base del poste con autocarga y se utiliza para extender la observación del nodo desde un punto fijo hacia bucles de patrulla cortos y repetibles alrededor del límite del campus. En un campus del CBD de Lisboa, eso puede significar revisar portones de servicio, entradas retranqueadas, barreras temporales, accesos de carga, puntos ciegos de la línea de valla y áreas donde una cámara PTZ fija puede perder línea de visión por mobiliario urbano, vehículos aparcados, pendiente o multitudes.
El escenario operativo es intencionadamente acotado: vigilancia perimetral de campus durante una interrupción de red. El robot no sustituye a políticas, guardias ni servicios de emergencia. Proporciona una capa móvil de sensórica y presencia que los equipos urbanos pueden asignar localmente cuando el sistema edge-AI del poste marca una anomalía o cuando la lógica de patrulla programada solicita una revisión de ruta. El robot puede ser cuadrúpedo o con ruedas, según las superficies del sitio, transiciones de bordillo, pendiente, restricciones de acoplamiento y reglas del espacio público. La forma final se confirmaría durante la revisión de ingeniería.
El poste SOLARTODO Sentinel apoya este flujo de trabajo porque la toma de decisiones no depende por completo de un viaje de ida y vuelta al cloud. El acelerador edge-AI embebido en el poste realiza inferencia localmente en un armario ventilado. La cámara PTZ, el sensor meteorológico y ambiental, y el radar 4D o LiDAR opcional alimentan el nodo edge para que el sistema pueda clasificar eventos, puntuarlos y activar acciones locales incluso cuando el backhaul está degradado. Esto importa para el OPEX porque el modo de fallo costoso no es solo un incidente; es el patrón de respuesta manual creado por la incertidumbre. Si cada interrupción obliga a dotación extra de patrullas, revisiones repetidas de supervisores y barridos manuales del perímetro, el coste operativo aumenta rápidamente.
Para la gestión urbana de Lisboa, el patrón liderado por robot debería evaluarse como un mecanismo de control del OPEX. El objetivo es reducir caminatas perimetrales manuales innecesarias, reducir despachos a ciegas y priorizar mejor el tiempo del personal durante periodos de ola de calor. El encuadre de KPI debería basarse en entradas de planificación y métricas de evaluación: número de bucles de patrulla automatizados por semana, número de revisiones duplicadas evitadas, porcentaje de eventos resueltos localmente, número de escalados durante periodos de interrupción y horas de mantenimiento por nodo. Aquí no se afirma ningún resultado logrado; estas son categorías de evaluación para un piloto propuesto o una especificación de contratación.
Configuración del nodo Sentinel centrada en comunicaciones
El foco modular de este despliegue propuesto son las comunicaciones. En la práctica, eso no significa presentar el poste como un producto de telecomunicaciones ni inventar una arquitectura de red fija. Significa configurar el nodo Sentinel para que la tarea urbana continúe de forma controlada cuando la ruta de red habitual no esté disponible. El principio clave de diseño es la continuidad local: sensar localmente, inferir localmente, decidir localmente donde la política lo permita, despachar el robot localmente y registrar eventos para sincronización posterior cuando vuelva la conectividad.
El armario edge-AI es central para esta estrategia de comunicaciones. Como la inferencia ocurre en el poste, el nodo puede seguir procesando entradas de cámaras y sensores sin esperar análisis en el cloud. Durante una interrupción de backhaul, puede priorizar alertas locales, instrucciones de despacho del robot, clips de eventos y registros de estado. Una vez restaurada la conectividad, el sistema puede reenviar los registros conservados al entorno operativo elegido por la ciudad, sujeto a reglas de gobernanza de datos y retención. Este comportamiento propuesto debería validarse durante la confirmación de ingeniería y las pruebas de aceptación.
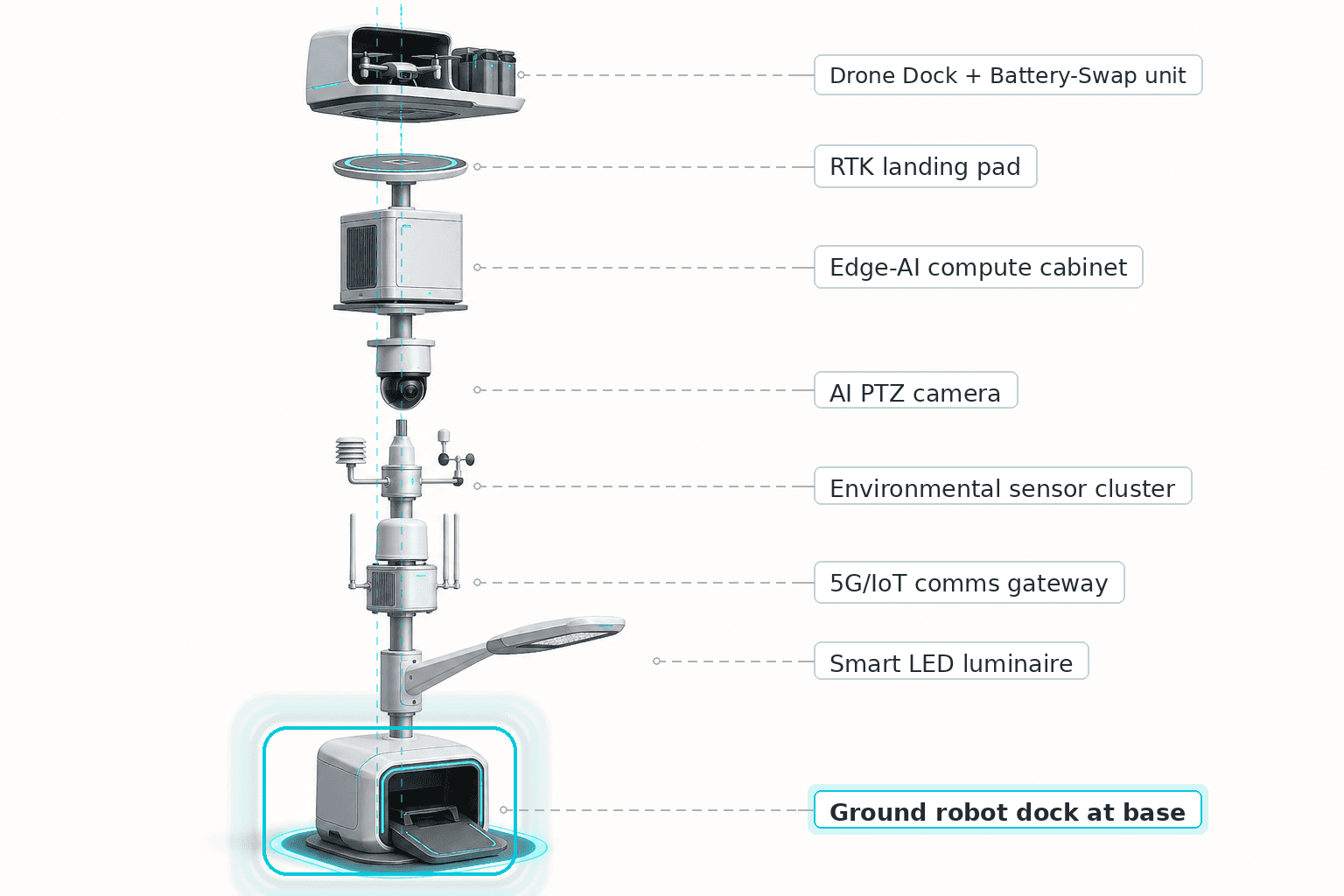
La forma visual también importa en un despliegue de CBD. El Sentinel se especifica como un poste delgado, cilíndrico u octogonal, con cuerpo de metal cepillado, sección media fotovoltaica azul medianoche y anillos de acento LED cian. Una base o nido blanco para dron SOLARTODO se sitúa en la parte superior con techo tipo clamshell, una plataforma de aterrizaje RTK de precisión y un cargador de intercambio en caliente de baterías para cambio automatizado rápido sin citar un tiempo de intercambio fijo. La unidad terrestre se acopla en la base. Mantener estos módulos en un solo poste urbano reduce la necesidad de armarios dispersos, equipos temporales o múltiples activos de campo desconectados.
La planificación energética sigue siendo específica del sitio. Sentinel puede alimentarse mediante red eléctrica o una configuración híbrida eólico-solar. En Lisboa, la selección final dependería de sombra, restricciones del paisaje urbano, contexto patrimonial, exposición al viento, disponibilidad de energía, acceso de mantenimiento y reglas de obra civil. La sección media fotovoltaica forma parte de la arquitectura del poste, pero no debe tratarse como una garantía universal de energía. La operación durante ola de calor debería comprobarse frente a ventilación del armario, ciclo de trabajo de baterías, disponibilidad de sensores, fiabilidad del acoplamiento y acceso seguro al espacio público.
Modelo operativo interdepartamental
Un despliegue creíble depende de reglas operativas compartidas antes de la instalación. La gestión urbana debería definir el objetivo de vigilancia perimetral y el modelo de evaluación de OPEX. Seguridad debería definir qué cuenta como anomalía de prioridad baja, media o alta. TI debería definir modos de interrupción, comportamiento aceptable de procesamiento local y reglas de sincronización. Facilities debería confirmar cimentaciones de postes, conexión a red o viabilidad de energía híbrida, acceso al armario y calendarios de limpieza. Los equipos de espacio público deberían confirmar que las rutas del robot no entran en conflicto con peatones, rutas de accesibilidad, acceso de emergencia, flujos ciclistas o diseños de eventos temporales.
El flujo de trabajo propuesto puede organizarse en tres estados operativos. En modo normal, la cámara PTZ y los sensores monitorizan el perímetro del campus, el robot realiza patrullas programadas o basadas en eventos, y los registros se mueven por la ruta de red urbana estándar. En modo de red degradada, el acelerador edge-AI embebido continúa la inferencia en dispositivo, el poste prioriza la toma de decisiones local y el robot aún puede despacharse para revisiones definidas. En modo de red restaurada, los datos de eventos y registros conservados se sincronizan conforme a la política aprobada. Esta estructura ayuda a los departamentos a decidir qué debe seguir disponible durante condiciones de interrupción y qué puede esperar.
La unidad de dron se incluye como parte del poste integrado, pero el tema principal aquí sigue siendo el robot. La base para dron puede apoyar inspección cenital cuando esté permitida y diseñada, usando la base blanca SOLARTODO con techo tipo clamshell, plataforma de aterrizaje RTK y cargador automatizado de intercambio en caliente de baterías. Para un perímetro de campus denso en el CBD de Lisboa, el uso de drones puede estar más restringido que el uso del robot por reglas de espacio aéreo, seguridad pública, clima y sitio. Por tanto, el diseño práctico debería evitar depender del vuelo como único mecanismo de continuidad.
La gestión de datos debería definirse como parte de la especificación de gestión urbana. El caso apoya inferencia en dispositivo y acción de baja latencia sin un viaje de ida y vuelta al cloud, pero las reglas de grabación, redacción, periodos de retención, controles de acceso y responsabilidades de escalado deben ser establecidas por el comprador y la revisión de cumplimiento local. El sistema debería evaluarse como una configuración operativa de nodo edge, no como una autoridad autónoma. Los supervisores humanos siguen siendo responsables de decisiones de política, escalado de emergencia y cualquier acción que requiera intervención formal.
Evaluación de OPEX y preparación del piloto
El caso de OPEX debería construirse a partir de supuestos recalculables en lugar de ahorros afirmados. Un comprador de Lisboa puede modelar la frecuencia actual de patrullas perimetrales manuales, exposición a horas extra durante olas de calor, revisiones duplicadas durante interrupciones de red, tasas de despachos falsos, visitas de mantenimiento y tiempo de inactividad. El despliegue Sentinel propuesto se convierte entonces en una pregunta de piloto controlado: ¿puede un poste integrado con inferencia local, un robot de patrulla acoplado, flujos de trabajo de comunicaciones resilientes y registro de eventos definido reducir la cantidad de tiempo de personal dedicada a verificar eventos perimetrales de baja confianza?
Un piloto de perímetro de campus debería comenzar con estudios del sitio en lugar de afirmaciones de cantidad. Los equipos de ingeniería confirmarían línea de visión, geometría de rutas del robot, ubicación de acoplamiento, cimentación del poste, energía de red o híbrida eólico-solar, ventilación del armario, vistas de cámara, necesidad opcional de radar 4D o LiDAR, comportamiento de respaldo de comunicaciones y acceso de mantenimiento. El comprador también debería definir condiciones de parada: umbrales meteorológicos, restricciones de eventos públicos, ventanas de prueba de interrupción de red y procedimientos de anulación manual.
El lenguaje de contratación debe seguir siendo específico y cuidadoso. El comprador no está adquiriendo un poste de cámara genérico, un dron autónomo ni un robot autónomo. El activo propuesto es SOLARTODO Sentinel, un nodo edge urbano Physical-AI con sensórica integrada, edge compute, base para dron, base para robot terrestre, opciones de energía e inferencia local. La configuración es personalizada y está sujeta a confirmación de ingeniería. No deben inferirse precios, garantías de cobertura, tasas de detección ni resultados operativos de este caso de estudio ilustrativo.
Para la gestión urbana de Lisboa, el resultado útil de un piloto sería un marco de decisión: qué tareas perimetrales pueden automatizarse, cuáles requieren revisión humana, qué condiciones de interrupción puede tolerar el nodo y qué entradas de OPEX se mueven lo suficiente para justificar una ampliación. La lección más importante es que el diseño de comunicaciones y el modelo operativo del robot deben especificarse juntos. Durante una interrupción de red en ola de calor, un robot solo es útil operativamente si el nodo edge aún puede detectar, decidir, actuar y registrar dentro de un bucle local controlado.
Configuración del sistema
| Parámetro | Configuración |
|---|---|
| Cuerpo del poste | Poste delgado, cilíndrico u octogonal, de metal cepillado, con sección media fotovoltaica azul medianoche y anillos de acento LED cian |
| Cómputo edge AI | Armario ventilado en el poste con acelerador edge-AI embebido para inferencia en dispositivo y decisiones locales de baja latencia |
| Módulo de robot | Robot de patrulla genérico acoplado en la base del poste con autocarga, configurado para revisiones de rutas en el perímetro del campus |
| Módulo de dron | Base blanca SOLARTODO con techo tipo clamshell, quadcopter genérico, plataforma de aterrizaje RTK y cargador automatizado de intercambio en caliente de baterías |
| Paquete de sensórica | Cámara PTZ, sensor meteorológico y ambiental, con radar 4D o LiDAR opcional sujeto a estudio del sitio |
| Opción de energía | Suministro de red o configuración híbrida eólico-solar, sujeto a confirmación de ingeniería del sitio en Lisboa |
| Continuidad de comunicaciones | Inferencia local, priorización de eventos y flujo operativo de almacenamiento y reenvío para periodos de red degradada |
Cómo funciona
- La cámara PTZ o el radar/LiDAR opcional marca una anomalía perimetral en el límite del campus del CBD.
- El acelerador edge-AI embebido clasifica y puntúa el evento localmente sin un viaje de ida y vuelta al cloud.
- Si la política lo permite, el poste despacha el robot de patrulla acoplado para verificar el portón, la línea de valla o la entrada de servicio.
- Durante una interrupción de red, el nodo prioriza alertas locales y conserva evidencia de eventos para sincronización posterior.
- Un supervisor municipal revisa el registro, confirma el estado de escalado y actualiza el log de evaluación de OPEX.
Supuestos de planificación (indicativos)
Datos de planificación ilustrativos que el comprador puede recalcular: métricas objetivo, no resultados logrados. Sujeto a confirmación final de ingeniería.
| Métrica | Supuesto de planificación | Valor indicativo |
|---|---|---|
| Mano de obra de inspección | La patrulla del robot automatiza revisiones perimetrales seleccionadas que de otro modo requerirían rondas manuales a pie | ~10-20 bucles de patrulla/semana objetivo para automatización |
| Respuesta a interrupciones | La inferencia edge local reduce despachos a ciegas cuando la monitorización central o el backhaul no están disponibles | ~25-40% de revisiones de baja prioridad objetivo para verificación local |
| Revisión del supervisor | Los clips de eventos y los registros de estado del robot quedan en cola para revisión después de que vuelva la conectividad | ~1 lote de revisión consolidado por evento de interrupción |
| Dotación durante ola de calor | Las ventanas de patrulla automatizadas cubren revisiones perimetrales de última hora de la tarde durante periodos de alta temperatura | ~2-4 ventanas de patrulla vespertina/semana objetivo |
| Planificación de mantenimiento | El poste integrado, la base, la carga del robot y el armario edge se inspeccionan en una sola visita de mantenimiento de campo | ~1 visita de mantenimiento planificada/nodo/mes como entrada de planificación |
Equipos desplegados
- Cuerpo de poste inteligente SOLARTODO Sentinel con sección media fotovoltaica y anillos de acento LED
- Armario ventilado de inferencia edge-AI en el poste
- Paquete de cámara PTZ y sensor meteorológico/ambiental
- Módulo opcional de sensórica radar 4D o LiDAR
- Base blanca para dron SOLARTODO con techo tipo clamshell y plataforma de aterrizaje RTK
- Quádricoptero genérico con integración de cargador automatizado de intercambio en caliente de baterías
- Robot de patrulla genérico acoplado en la base con autocarga
- Paquete de conexión eléctrica de red o híbrida eólico-solar
Preguntas frecuentes
¿Es este un resultado real de despliegue en Lisboa?
No. Esta es una configuración de despliegue B2B propuesta e ilustrativa para la planificación de gestión urbana de Lisboa. No afirma un proyecto adjudicado, cantidad instalada, tasa de detección alcanzada, área de cobertura, nombre de cliente, certificación ni resultado operativo. El propósito es mostrar cómo SOLARTODO Sentinel podría especificarse para una tarea de vigilancia perimetral de un campus en el CBD, sujeto a confirmación final de ingeniería.
¿Por qué el robot es el módulo principal para este escenario de Lisboa?
El robot es el módulo principal porque la tarea es vigilancia perimetral de campus, donde las cámaras fijas pueden no cubrir portones retranqueados, entradas de servicio, sombras de vehículos aparcados o barreras temporales. Un robot de patrulla acoplado puede realizar bucles cortos de verificación desde la base del poste, reduciendo la necesidad de revisiones manuales durante periodos de ola de calor y condiciones de red degradada, mientras los supervisores humanos mantienen el control.
¿Cómo opera el sistema durante una interrupción de red?
La configuración propuesta se basa en inferencia en el poste en lugar de un viaje obligatorio de ida y vuelta al cloud. El acelerador edge-AI embebido procesa localmente las entradas de sensores, puntúa eventos, despacha el robot cuando la política lo permite y conserva registros de eventos para sincronización posterior. El comportamiento exacto durante interrupciones, el enrutamiento de alertas, la retención y las comunicaciones de respaldo deben ser confirmados por los equipos de TI e ingeniería del comprador.
¿El SOLARTODO Sentinel sustituye a guardias o equipos de respuesta a emergencias?
No. El Sentinel es un poste de nodo edge urbano integrado destinado a apoyar detección, verificación, automatización de patrullas y mantenimiento de registros. No sustituye la autoridad humana, los servicios de emergencia ni las decisiones de política municipal. En este caso de estudio, el robot ayuda a verificar eventos perimetrales de baja confianza para que el personal pueda priorizar respuestas con base en mejor evidencia local.
¿Puede usarse el dron como herramienta principal de inspección?
El dron forma parte del poste integrado SOLARTODO Sentinel, con una base blanca, techo tipo clamshell, plataforma de aterrizaje RTK y cargador automatizado de intercambio en caliente de baterías. Sin embargo, este escenario de Lisboa está liderado por robot porque las condiciones densas del CBD pueden restringir el vuelo. El uso del dron debería tratarse como opcional y sujeto a reglas del sitio, revisión de seguridad, clima y confirmación de ingeniería.
¿Qué debería medir la gestión urbana de Lisboa en un piloto?
El comprador debería medir KPI de planificación en lugar de asumir ahorros por adelantado: patrullas manuales evitadas, eventos durante interrupciones verificados localmente, tiempo de revisión del supervisor, visitas de mantenimiento, finalización de rutas del robot y calidad del escalado. Estas entradas permiten a la ciudad recalcular el impacto de OPEX usando su propio modelo laboral, plan operativo de ola de calor, arquitectura de red y requisitos de servicio.
Explorar más
- Línea de postes City AI / alumbrado inteligente
- Más casos de despliegue de ciudad inteligente
- Hable con nuestro equipo de ingeniería
¿Planea un despliegue de IA física similar para calles, campus o espacios públicos? Solicite una consulta de ingeniería