
Un poste urbano de IA / nodo de borde de IA física Sentinel es un poste inteligente SOLARTODO delgado e integrado que combina sensorización local, inferencia de IA en el propio poste, una base para dron, un robot de patrullaje acoplado y opciones de alimentación en un solo activo urbano. En este despliegue propuesto de control de inundaciones para el casco histórico de São Paulo, los nodos supervisan secciones transversales fluviales, activan inspecciones con robot y comparten evidencia con una autoridad de transporte para acortar las decisiones de tiempo de respuesta.
Resumen de Control de Inundaciones en Temporada Festiva
Este despliegue ilustrativo en São Paulo se plantea como un plan operativo de una autoridad de transporte para el núcleo del casco histórico durante los picos de viajes y comercio de temporada festiva. El enfoque no es una muestra genérica de ciudad inteligente. Es un flujo de trabajo de control de inundaciones para calles, accesos de autobuses, rampas de puentes, entornos de estaciones y corredores adyacentes a pasos inferiores que pueden perder fiabilidad operativa cuando la lluvia intensa coincide con un mayor movimiento de peatones y vehículos. El centro histórico de São Paulo y los distritos antiguos adyacentes se sitúan dentro de una trama vial densa formada por viaductos, cursos de agua canalizados, arroyos entubados y bocas de tormenta difíciles de despejar. Cuando el agua de lluvia se acumula cerca de un cruce, la primera pregunta operativa para una autoridad de transporte es práctica: mantener los vehículos en movimiento, sostener el servicio, desviar rutas o cerrar un acceso vulnerable antes de que pasajeros y equipos queden expuestos a una interrupción evitable.
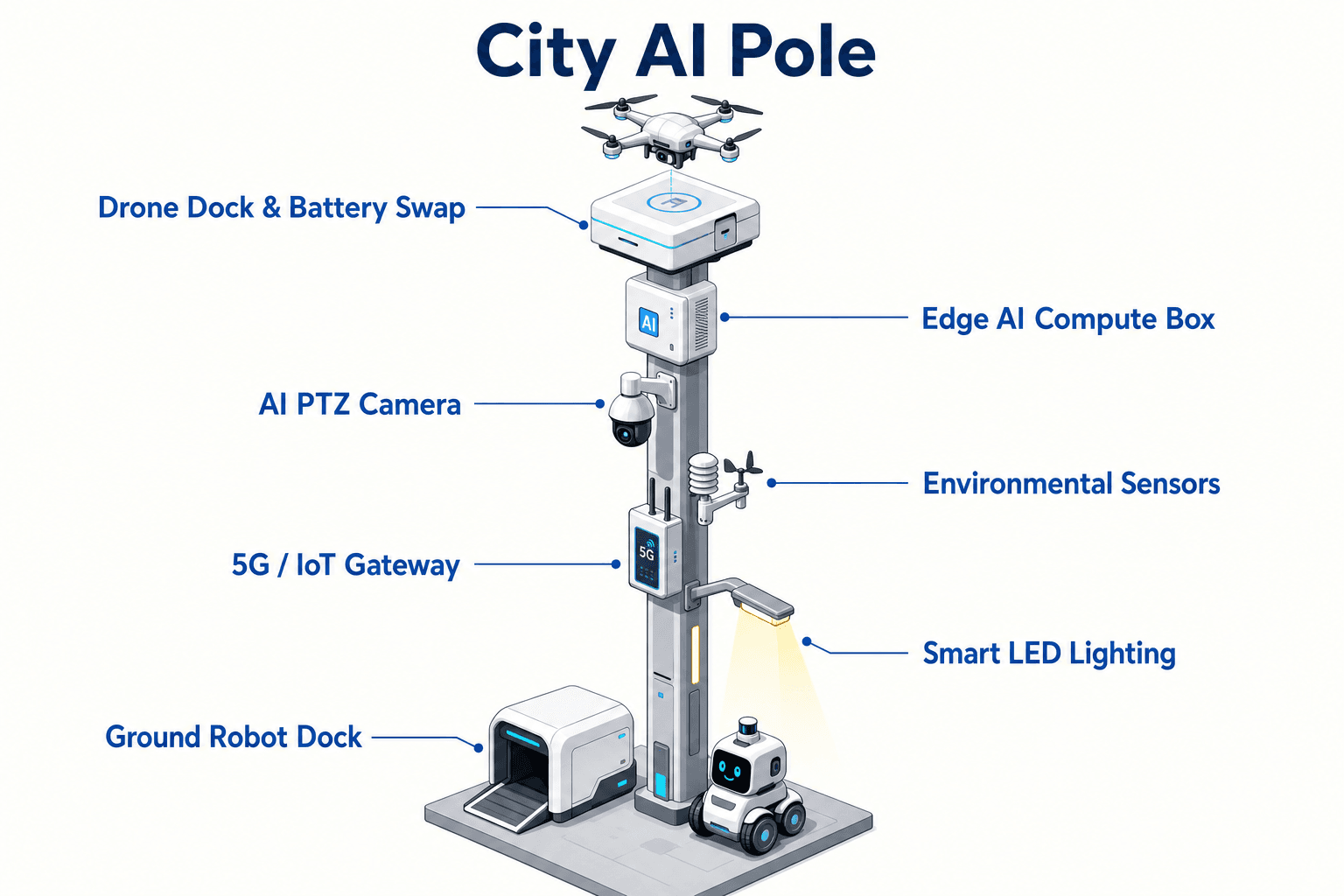
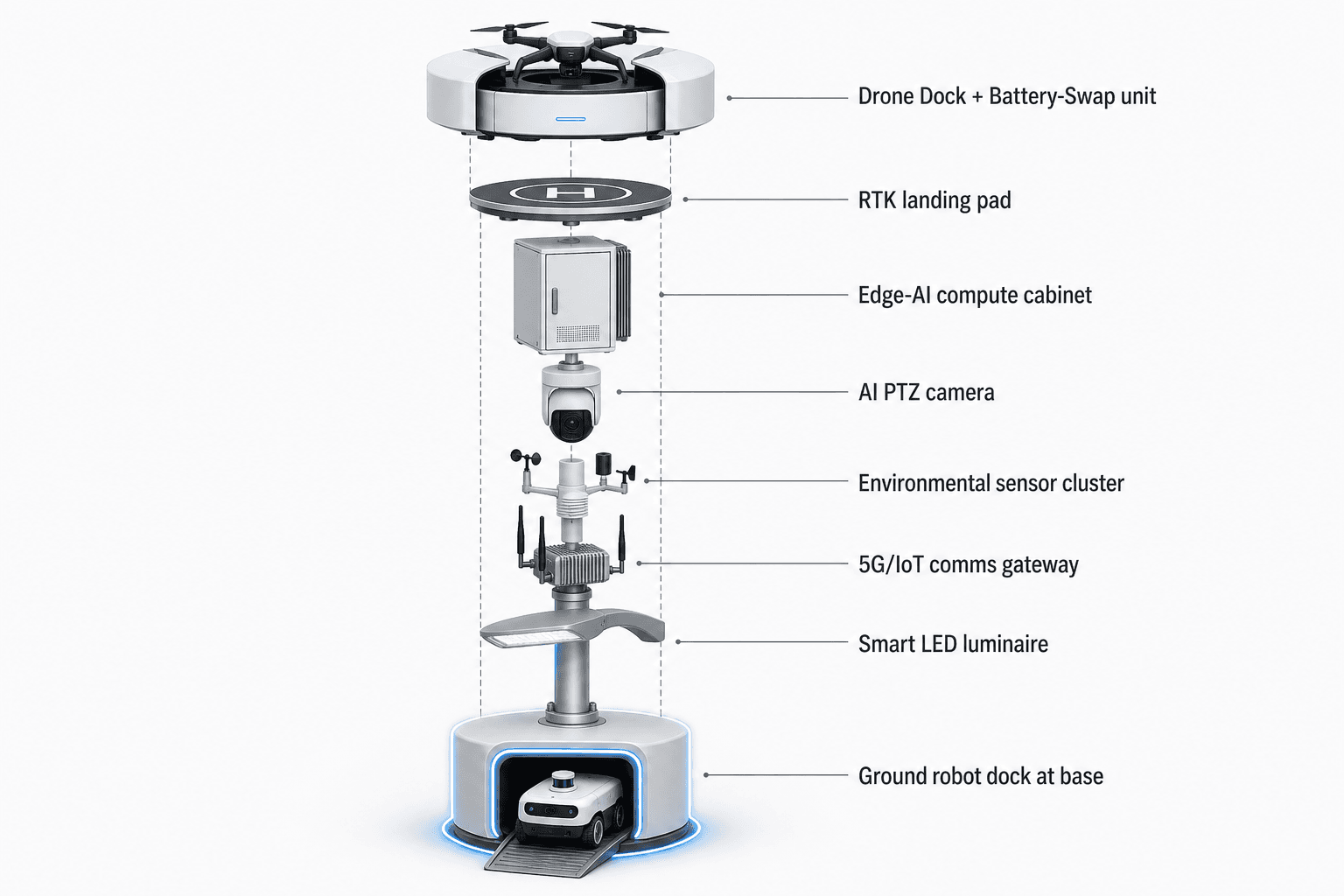
La configuración propuesta de SOLARTODO Sentinel es un poste personalizado de nodo urbano de borde, sujeto a confirmación final de ingeniería, posicionado como un punto de evidencia compartida y no como un dispositivo departamental. Cada poste delgado cilíndrico u octagonal utiliza un cuerpo de metal cepillado, una sección fotovoltaica intermedia azul medianoche y anillos de acento LED cian. El poste integra el sensor meteorológico/ambiental, la cámara PTZ, el acelerador de IA de borde embebido, la base para dron y el robot terrestre de patrullaje en un solo activo urbano. Para el activador de temporada festiva, el supuesto operativo es que la autoridad de transporte necesita confianza más rápida cuando varios departamentos observan la misma tormenta desde pantallas separadas. El sensor meteorológico se convierte en el primer activador local, el robot se convierte en el verificador de campo y el KPI de tiempo de respuesta se convierte en la medida común entre los equipos de transporte, drenaje, defensa civil y operaciones de eventos.
Patrón de Despliegue en Sección Transversal Fluvial
El modo de despliegue es de sección transversal fluvial, lo que significa que cada nodo propuesto se planifica alrededor de una franja operativa perpendicular de riesgo: borde de ribera, canal o río, interfaz de puente o alcantarilla, vía de acceso, zona de parada de autobús, sendero peatonal, boca de tormenta y ruta de retorno para un patrullaje robótico. En São Paulo, este patrón es relevante alrededor de corredores influidos por el Tietê, Pinheiros, Tamanduateí y cursos de agua menores canalizados o cubiertos que afectan la red de movilidad del casco histórico. El plan no asume una cantidad fija de postes ni un área de cobertura definida. El espaciamiento final, los puntos de montaje, el diseño de alimentación y los permisos se confirmarían mediante revisión de ingeniería civil, eléctrica, de drenaje y de transporte.
Un poste Sentinel en una sección transversal de este tipo se configura para leer la condición meteorológica/ambiental local, ejecutar inferencia en el dispositivo e iniciar verificación de campo sin esperar un viaje de ida y vuelta a la nube. La cámara PTZ ofrece al centro de operaciones una vista dirigida de la acumulación de agua, puntos de drenaje bloqueados, comportamiento del tráfico y exposición de peatones. Puede evaluarse radar 4D o LiDAR opcional cuando la visibilidad, la geometría o el movimiento del tráfico hagan insuficiente una evaluación basada solo en cámara, sujeto a estudio del sitio. La base/nido para dron SOLARTODO blanca montada en la parte superior, con techo tipo concha, admite un cuadricóptero genérico para comprobaciones aéreas breves del cruce y los accesos cercanos. Su plataforma de aterrizaje de precisión RTK y el cargador automatizado de baterías de intercambio en caliente se utilizan para minimizar el tiempo de inactividad sin afirmar una duración fija de intercambio.
El robot de patrullaje montado en la base es central para este plan de casco histórico. En calles estrechas, pasos inferiores en sombra y zonas junto al bordillo donde la profundidad del agua de lluvia o los residuos pueden ser difíciles de evaluar desde un único ángulo de cámara, el robot acoplado proporciona una verificación más cercana. Se seleccionaría un factor de forma cuadrúpedo o con ruedas después de la inspección de ruta, la revisión de superficie y la evaluación de seguridad.
Del Sensor Meteorológico a la Asignación de Tareas al Robot
El módulo de enfoque es el sensor meteorológico, pero el valor operativo proviene de cómo inicia la tarea del robot. En el flujo de trabajo propuesto, el sensor meteorológico/ambiental no se trata como una fuente pasiva de datos. Es un activador local vinculado a umbrales de control de inundaciones definidos por la autoridad de transporte y los departamentos asociados. Cuando las condiciones avanzan hacia una banda de alerta, el acelerador de IA de borde embebido del poste correlaciona la entrada del sensor local con el contexto de la cámara y reglas operativas predefinidas. La clasificación rutinaria se realiza en el poste, con inferencia de baja latencia en el dispositivo y sin viaje de ida y vuelta a la nube para el primer paso de clasificación.
Una vez puntuado el evento local, el robot de patrullaje puede despacharse desde la base del poste para una ruta corta de inspección, sujeto a reglas de seguridad y aprobación de ruta. El robot puede verificar el bloqueo de una boca de tormenta, observar agua estancada en el borde de un carril de autobús, inspeccionar la parte inferior de un acceso a puente desde una ruta permitida o confirmar si una ruta peatonal sigue siendo transitable. El robot regresa a la base de acoplamiento para carga automática, manteniendo el poste como el punto operativo integrado en lugar de crear un programa de robots separado. El dron permanece como módulo de apoyo para contexto aéreo cuando las condiciones de línea de visión, acceso o seguridad justifican el vuelo.
Para una autoridad de transporte, la distinción importa. Una alerta meteorológica remota por sí sola puede ser demasiado abstracta para activar una decisión de servicio. Una llamada de campo por sí sola puede llegar tarde. Una imagen de cámara por sí sola puede ser cuestionada por otro departamento que ve un sistema distinto. El poste Sentinel se propone como un ciclo local de evidencia: activador meteorológico, clasificación de borde, verificación con robot, revisión PTZ, vista aérea opcional y registro de evento compartido. Esa secuencia está diseñada para reducir el tiempo entre la señal de riesgo local y la decisión operativa, dejando la acción final en manos del personal municipal autorizado.
Ruptura de Silos Entre Departamentos
El principal punto de dolor es el comportamiento en silos entre departamentos. Las decisiones de control de inundaciones en una gran ciudad suelen requerir que operaciones de transporte, mantenimiento de drenaje, control de tráfico, defensa civil, seguridad pública, contratistas de saneamiento y gestores de eventos acuerden rápidamente qué está ocurriendo. En un periodo festivo en el casco histórico, el riesgo aumenta porque un retraso evitable puede afectar frecuencias de autobuses, acceso a estaciones, zonas de taxis y transporte bajo demanda, ventanas de entrega, rutas de emergencia y movimiento de multitudes cerca de calles comerciales. El despliegue propuesto de Sentinel no se presenta como reemplazo de esos departamentos. Es un nodo de campo que crea un paquete de evidencia con marca de tiempo desde una sección transversal fluvial específica.
La autoridad de transporte puede usar ese paquete para coordinar una decisión sin pedir a cada equipo que empiece desde su propio sensor, cámara, llamada de campo o hilo de chat. El paquete puede incluir el activador del sensor meteorológico, la clasificación de evento por IA de borde, capturas o clips PTZ de acuerdo con la política local, notas de inspección del robot, contexto opcional del dron, decisiones del operador y estado de seguimiento. La gobernanza de datos, la retención, los controles de acceso y la integración con los sistemas de la autoridad se especificarían durante el diseño de ingeniería y políticas.
Esto importa porque el KPI de la autoridad de transporte es el tiempo de respuesta, no el volumen de sensores. Si un equipo de drenaje ve lluvia, el personal de tráfico ve congestión y los supervisores de campo ven agua en momentos distintos, la pregunta compartida se retrasa. El poste propuesto cambia el patrón de coordinación al anclar la conversación a una sección transversal y a un registro de incidente. El sensor meteorológico inicia el evento, pero el robot lo vuelve operativamente concreto: puede confirmar si el problema es una condición de pavimento mojado, una ruta bloqueada, un peligro por aumento de agua o una obstrucción de drenaje que requiere un respondedor diferente.
Plan de Evaluación del Tiempo de Respuesta
El plan de evaluación trata el tiempo de respuesta como una métrica objetivo, no como un resultado logrado. Antes del despliegue, la autoridad de transporte definiría el proceso de referencia para las decisiones de control de inundaciones en temporada festiva en secciones transversales fluviales seleccionadas: cómo se recibe actualmente una alerta, quién la valida, quién autoriza una acción de transporte y cómo se registra la acción. La configuración Sentinel se evaluaría después contra esa línea base utilizando marcas de tiempo del sensor meteorológico, la clasificación de borde, el despacho del robot, el acuse de recibo del operador, la acción de campo y la nota de cierre. La intención es medir si el poste integrado acorta la ruta de decisión y mejora la confianza, sujeto a confirmación final de ingeniería.
No se afirma una tasa de detección específica, mejora del tiempo de respuesta, cantidad de despliegue ni área de cobertura. Un piloto creíble empezaría con supuestos de planificación, reglas operativas controladas y un periodo de vigilancia festiva claramente definido. La autoridad de transporte predefiniría clases de rutas, bandas de severidad de alerta, condiciones de no acceso para el robot, reglas de autorización de dron y contactos de escalamiento. Cada evento se revisaría para determinar si el activador meteorológico fue significativo, si la verificación con robot añadió contexto útil, si el paquete compartido redujo llamadas duplicadas y si la decisión final se registró con claridad.
Operativamente, el éxito se plantea como mejor ritmo y mayor claridad de responsabilidad. La autoridad de transporte debería poder ver cuándo comenzó la condición local, cuándo la clasificó el poste, cuándo la comprobó el robot, cuándo el equipo responsable aceptó el incidente y cuándo se tomó la decisión sobre el corredor. Ese registro ayuda a refinar umbrales futuros, rutas de patrullaje, planes de dotación y manuales interdepartamentales para el siguiente periodo festivo sin afirmar que el equipo por sí solo resuelve el desafío de control de inundaciones de São Paulo.
Configuración del sistema
| Parámetro | Configuración |
|---|---|
| Forma del poste | Poste Sentinel delgado cilíndrico u octagonal de metal cepillado, con sección fotovoltaica intermedia azul medianoche y anillos de acento LED cian; montaje final sujeto a confirmación de ingeniería del sitio. |
| Enfoque del sensor meteorológico | Paquete de sensores meteorológicos/ambientales en el poste usado como activador local principal para umbrales de control de inundaciones en una sección transversal fluvial de São Paulo. |
| Cómputo de IA de borde | Gabinete ventilado en el poste con acelerador de IA de borde embebido para inferencia en el dispositivo, clasificación de baja latencia y sin viaje de ida y vuelta a la nube para clasificación rutinaria. |
| Robot terrestre de patrullaje | Robot de patrullaje genérico cuadrúpedo o con ruedas acoplado en la base del poste con carga automática, configurado para rutas aprobadas de inspección junto al bordillo y en cruces. |
| Unidad de dron | Base/nido para dron SOLARTODO blanca con techo tipo concha, cuadricóptero genérico, plataforma de aterrizaje de precisión RTK y cargador automatizado de baterías de intercambio en caliente. |
| Sensado visual y opcional | Cámara PTZ para inspección dirigida, con radar 4D o LiDAR opcional evaluado cuando la geometría del sitio y la visibilidad requieran sensorización adicional. |
| Configuración de alimentación | Diseño de alimentación por red eléctrica o híbrido eólico-solar, seleccionado después de revisar acceso a servicios, exposición solar, viabilidad eólica y acceso de mantenimiento. |
Cómo funciona
- El sensor meteorológico/ambiental cruza un umbral de control de inundaciones definido localmente en la sección transversal fluvial.
- La IA de borde en el poste correlaciona el activador con el contexto de la cámara PTZ y puntúa el evento.
- El robot de patrullaje sale de la base de acoplamiento por una ruta aprobada para verificar condiciones de bordillo, boca de tormenta y acceso.
- El dron despega solo cuando se necesita contexto aéreo autorizado para el cruce o los accesos cercanos.
- Operaciones de transporte recibe un paquete de evento compartido para decisión, encaminamiento y escalamiento.
- El sistema registra marcas de tiempo del sensor, observaciones del robot, acción del operador y estado de cierre para revisión del tiempo de respuesta.
Supuestos de planificación (indicativos)
Datos de planificación ilustrativos que el comprador puede recalcular: métricas objetivo, no resultados logrados. Sujeto a confirmación final de ingeniería.
| Métrica | Supuesto de planificación | Valor indicativo |
|---|---|---|
| Sustitución de inspección con robot | El robot de patrullaje gestiona comprobaciones iniciales seleccionadas que de otro modo requerirían observación manual durante una vigilancia festiva de inundaciones. | ~3 a 5 rondas de inspección por vigilancia automatizadas como insumo de planificación. |
| Puntuación del tiempo de respuesta | La autoridad de transporte mide el tiempo transcurrido desde la alerta del sensor meteorológico hasta la decisión del operador usando marcas de tiempo compartidas del evento. | Ventana de planificación de ~10 a 15 minutos para evaluación, ajustada por clase de ruta. |
| Traspaso entre departamentos | Un paquete de evento se comparte entre los equipos de transporte, drenaje, defensa civil y supervisión de campo en lugar de actualizaciones informales separadas. | ~1 registro común de incidente por alerta validada. |
| Revisión de vigilancia festiva | Los supervisores de operaciones revisan la calidad de los umbrales, la utilidad del robot y el encaminamiento de decisiones durante y después de cada vigilancia festiva. | ~2 ciclos de revisión por periodo de vigilancia. |
| Filtrado de escalamiento manual | La clasificación de borde y la verificación con robot ayudan a separar condiciones solo de observación de condiciones que requieren escalamiento de campo. | ~4 categorías de alerta para planificación: observar, verificar, desviar, cerrar. |
Equipos desplegados
- Cuerpo del poste inteligente delgado SOLARTODO Sentinel con sección fotovoltaica intermedia y anillos de acento LED
- Módulo de sensor meteorológico/ambiental para umbrales locales de control de inundaciones
- Gabinete ventilado de IA de borde en el poste con acelerador de IA de borde embebido
- Cámara PTZ para inspección dirigida de corredores y cruces
- Base/nido para dron SOLARTODO blanca con techo tipo concha, plataforma de aterrizaje RTK y cargador de baterías de intercambio en caliente
- Cuadricóptero genérico configurado para comprobaciones autorizadas de contexto aéreo
- Robot de patrullaje genérico acoplado con carga automática en la base del poste
- Módulo opcional de radar 4D o LiDAR, sujeto a confirmación del sitio
Preguntas frecuentes
¿Este proyecto propuesto en São Paulo es una compra de drones o robots?
No. La configuración propuesta es un despliegue integrado de poste urbano centrado en SOLARTODO Sentinel como nodo de borde de IA física. El dron y el robot de patrullaje son módulos dentro del flujo de trabajo operativo del poste. No se presentan como productos independientes ni como programas separados, y su configuración depende de la confirmación final de ingeniería.
¿Por qué la autoridad de transporte es el actor principal en un escenario de control de inundaciones?
La autoridad de transporte es el actor más directamente responsable de mantener utilizables los corredores, accesos de autobuses, rampas de puentes, accesos a estaciones y rutas de desvío durante eventos de lluvia. Los equipos de drenaje pueden ser responsables de la remoción de agua, pero operaciones de transporte debe decidir si desviar, retener, restringir o reabrir activos de movilidad cuando el riesgo de inundación afecta el servicio.
¿Cómo mejora el sensor meteorológico el KPI de tiempo de respuesta?
El sensor meteorológico/ambiental proporciona el primer activador local en la sección transversal fluvial, de modo que el evento puede clasificarse en el poste antes de que los equipos esperen un informe distante o una llamada manual de campo. Inicia una secuencia medida que incluye clasificación de borde, verificación con robot, acuse de recibo del operador y una decisión de transporte registrada.
¿Qué aporta el robot de patrullaje que una cámara fija no puede aportar?
Una cámara PTZ fija puede inspeccionar áreas visibles, pero un cruce en el casco histórico puede incluir sombras de bordillo, accesos a puentes, bordes de pasos inferiores, bocas de tormenta bloqueadas y rutas peatonales fuera del mejor ángulo de cámara. El robot acoplado puede realizar una ruta de patrullaje aprobada a corta distancia y regresar a la carga automática, añadiendo contexto de campo al registro de incidente compartido.
¿El poste requiere procesamiento en la nube para tomar la primera decisión?
La clasificación rutinaria de primera etapa está diseñada para inferencia en el dispositivo usando el acelerador de IA de borde embebido en el poste, por lo que el sistema no depende de un viaje de ida y vuelta a la nube para la clasificación inicial. Los sistemas externos aún pueden recibir registros, video y decisiones de operadores de acuerdo con las políticas de integración, gobernanza y retención de la autoridad.
¿Qué debe confirmarse antes de una instalación real en São Paulo?
El despliegue final requeriría una revisión de ingeniería de la ubicación del poste, estructura, acceso a servicios, alimentación por red o híbrida eólico-solar, seguridad de rutas del robot, reglas de autorización del dron, gobernanza de datos, acceso de mantenimiento e integración con sistemas de operaciones de transporte. El plan propuesto es un modelo de despliegue B2B configurable, no una afirmación de rendimiento de campo completado.
Explorar más
- Línea de postes City AI / alumbrado inteligente
- Más casos de despliegue de ciudad inteligente
- Hable con nuestro equipo de ingeniería
¿Planea un despliegue de IA física similar para calles, campus o espacios públicos? Solicite una consulta de ingeniería