Opérations de drones au-delà de la ligne de visée depuis des réseaux intelligents…
Cinn Song
Founder & Chief Solutions Architect

Les opérations de drones BVLOS depuis les réseaux de poteaux intelligents SOLARTODO utilisent la recharge CIGS de 0.8-1.1 kW, le stockage de 5-20 kWh et les 48,383 vols BVLOS FAA BEYOND comme références pour les achats en phase pilote et la planification des sites.
Résumé
Les opérations de drones BVLOS depuis les réseaux de poteaux intelligents SOLARTODO utilisent la recharge CIGS de 0.8-1.1 kW, le stockage de 5-20 kWh et les 48,383 vols BVLOS FAA BEYOND comme références pour les achats en phase pilote et la planification des sites.
Points clés
Ces 8 enseignements d’achat traduisent les réseaux de poteaux intelligents BVLOS en budgets énergétiques, jalons d’approbation, périmètre EPC, hypothèses de ROI et limites opérationnelles en phase pilote.
- Définir le périmètre BVLOS par longueur de corridor, voie d’approbation, statut Remote ID et au moins 1 point d’autorisation humaine avant l’achat.
- Modéliser le budget énergétique de chaque SOLARTODO Sky Hub autour d’une production de crête CIGS de 0.8-1.1 kW DC et d’une recharge de 6-9 kWh/day.
- Dimensionner le stockage batterie à 5-20 kWh par poteau pour absorber les échanges de drones, l’edge compute, la détection et les cycles de service des patrouilles robotisées.
- Planifier les opérations pilotes autour de 3 niveaux de maturité : matériel prêt, workflows en phase pilote et intégrations en position avancée nécessitant validation.
- Utiliser le traitement en périphérie pour conserver 100% des flux vidéo et capteurs bruts sur le poteau, tout en envoyant uniquement des métadonnées d’événements désidentifiées.
- Comparer les réseaux de poteaux aux patrouilles avec personnel en estimant 20-40% de visites de routine en moins sur les grands campus après validation pilote.
- Spécifier le C-UAS uniquement comme détection, suivi, coordination et simulation de capture par filet ou de dissuasion par approche rapprochée, non létales et autorisées par un humain.
- Demander les prix EPC en 3 niveaux, puis appliquer les orientations de volume de 5%, 10% ou 15% à 50, 100 ou 250 unités.
Réseaux de poteaux intelligents BVLOS pour opérations de drones hors réseau
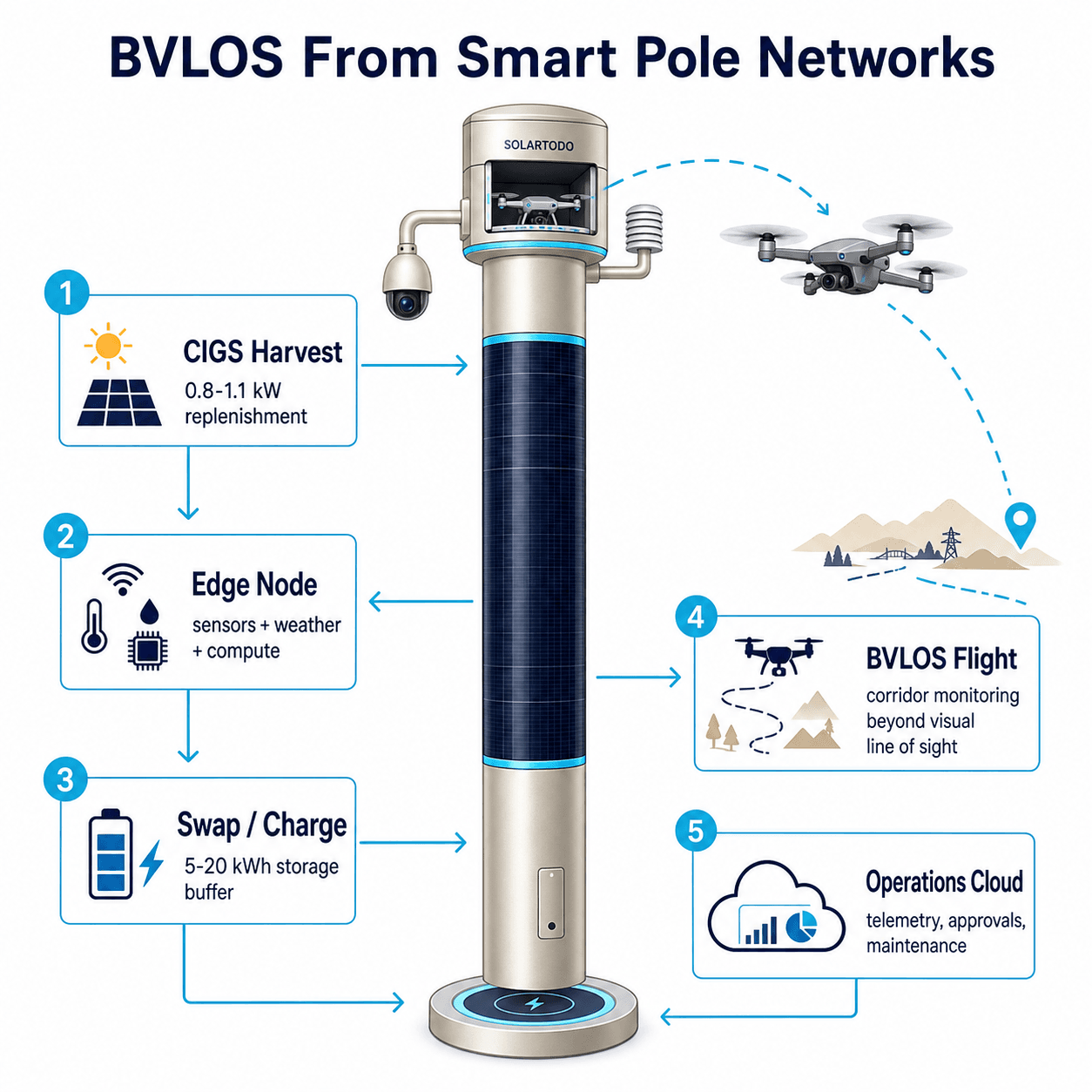
Les réseaux de poteaux intelligents BVLOS déplacent les opérations de drones depuis des points de lancement uniques vers une infrastructure distribuée, contrôlée par approbation, utilisant un stockage de 5-20 kWh et une recharge solaire de 6-9 kWh/day. Pour SOLARTODO Sentinel / Sky Hub, le service autonome de drones, l’inspection robotisée, la coordination air-sol et la réponse C-UAS sont des capacités conceptuelles prospectives au stade de démonstration ou de pilote, sauf preuve distincte.
Les opérations au-delà de la ligne de visée ne sont pas simplement une trajectoire de vol plus longue. Elles exigent un système capable de prouver où se trouve l’aéronef, ce qu’il fait, comment les risques sont détectés et qui est autorisé à intervenir. Un réseau de poteaux intelligents aide, car chaque nœud devient un point fixe pour le tampon énergétique, le calcul local, la détection environnementale, l’état du véhicule et les enregistrements de commande.
Le concept SOLARTODO Sky Hub doit être compris comme un poteau intelligent pur, sans système d’éclairage. Il vise les quartiers intelligents, parcs industriels, ports, campus, périmètres urbains, corridors de services publics et zones d’infrastructures critiques où un acheteur souhaite la patrouille, l’inspection, la vérification d’alarme et l’autonomie sur site depuis une micro-station répétable au format poteau.
Selon le programme FAA BEYOND (2025), la Phase 1 a enregistré 70,563 vols, dont 48,383 vols BVLOS, avant le début de la Phase 2 en 2025. La FAA indique également que "Remote ID lays the foundation" pour des opérations de drones plus complexes ; l’identification, la télémétrie et la responsabilité de la station de contrôle doivent donc faire partie du dossier d’achat.
Pour les acheteurs B2B, le problème métier n’est généralement pas le drone lui-même. Le problème difficile est la répétabilité : maintenir les aéronefs chargés, attribuer les missions, conserver les journaux d’audit et surveiller les limites météorologiques. Un réseau de poteaux donne au propriétaire des points d’ancrage opérationnels qui peuvent être mis en service, inspectés et gouvernés comme d’autres infrastructures critiques.
Architecture technique et gouvernance des données

Un nœud Sky Hub prêt pour le BVLOS combine 9 domaines fonctionnels : alimentation hors réseau, service de drones, edge compute, détection, données environnementales, contrôle de mission, support robotique, coordination C-UAS et échange de métadonnées.
Architecture énergétique et cycles de service
Le poteau est conçu comme une micro-station entièrement hors réseau, secourue par batterie. Sa couche de recharge CIGS doit être modélisée à environ 0.8-1.1 kW DC de crête dans les régions fortement ensoleillées, avec environ 6-9 kWh/day en conditions de ciel dégagé et environ 5-8 kWh/day en moyenne annuelle lorsque la ressource solaire est favorable. Il s’agit d’un budget de recharge, pas d’une autosuffisance illimitée.
Les tâches à forte puissance sont planifiées en fonction du stockage et du cycle de service. Lancement de drone, retour, échange automatisé de batterie, inférence en périphérie, détection environnementale, communications et recharge de robot terrestre puisent tous dans la même enveloppe énergétique. Une batterie de classe 5-20 kWh permet au système d’absorber les pics courts pendant que la couche CIGS restaure l’état de charge.
Selon NREL PVWatts V8 (2026), la modélisation PV peut accepter des entrées de capacité système de 0.05-500,000 kW et des sorties horaires ; utilisez-la pour la présélection de sites, non comme garantie finale de rendement CIGS. Selon IRENA (2026), les renouvelables ont ajouté 692 GW en 2025 et représenté 85.6% de l’expansion mondiale de capacité, le solaire comptant pour environ 511 GW. Le Directeur général d’IRENA, Francesco La Camera, déclare que "renewable energy remains consistent and steadfast in its expansion."
Edge Compute, confidentialité et workflow de mission
La pile edge utilise un calcul de classe Jetson pour exécuter l’inférence locale, planifier les charges de travail et gérer le routage des événements. Les données vidéo et capteurs brutes restent sur le poteau. Seuls les alertes désidentifiées, les métadonnées d’état, les journaux de mission, l’état de la batterie et les dossiers de santé des équipements doivent quitter le nœud.
Cette conception de traitement local soutient une gouvernance orientée PDPL/LGPD, car la salle de contrôle reçoit des preuves opérationnelles sans recourir par défaut à une exportation continue de données brutes. Elle réduit également la charge de bande passante lorsque de nombreux événements ont peu de valeur tant qu’un seuil de règle n’est pas franchi. Les analyses locales doivent être limitées au comptage anonyme de véhicules, à la densité de foule, à l’intrusion et à la connaissance périmétrique, et non à la reconnaissance faciale active ou à la reconnaissance de plaques d’immatriculation.
La boucle opérationnelle comprend la détection, l’évaluation et la réponse autorisées, la planification par edge-compute, ainsi que les opérations terrain et la maintenance. En termes de centre de commandement, cela devient une image opérationnelle commune qui affiche l’état des nœuds, la file de missions, les limites météorologiques, la disponibilité des aéronefs, la disponibilité des robots, la gravité des événements et l’état d’autorisation humaine.
Service de drones et limites C-UAS
Le workflow de drones comprend le lancement, la patrouille, l’inspection, le retour, l’échange de batterie et le redéploiement de tâches. Un magasin de batteries multi-baies peut soutenir plusieurs sorties consécutives en remplaçant la batterie de l’aéronef posé par un pack chargé. La gestion de mission doit inclure la planification d’itinéraire, l’état d’échange, la mise en file des tâches, la télémétrie de santé et les journaux.
La coordination C-UAS doit rester non létale et autorisée par un humain. Le poteau peut détecter et suivre un drone non autorisé à l’aide de la perception embarquée et d’une entrée optionnelle de capteurs partenaires, puis coordonner un drone ami pour une capture aérienne simulée par filet ou une dissuasion par approche rapprochée. Le radar doit être traité uniquement comme une entrée externe optionnelle ou simulée, et non comme un matériel du poteau. Toute mesure d’atténuation nécessite une revue juridique locale et une approbation explicite de l’opérateur.
Analyse d’investissement EPC et structure tarifaire
La livraison EPC doit comparer 3 périmètres commerciaux : fourniture d’équipements FOB, logistique livrée CIF et déploiement clé en main avec installation, mise en service, formation et essais d’acceptation.
Pour SOLARTODO, l’achat suit normalement la demande d’information, le devis hors ligne, la revue d’ingénierie, la confirmation du périmètre de livraison et la discussion de financement pour les grands projets qualifiés. La livraison clé en main EPC doit inclure l’étude de site, la coordination des travaux civils, les fondations de poteaux, la mise en service énergétique hors réseau, la configuration du service de drones, l’étalonnage des capteurs environnementaux, l’intégration réseau, la formation des opérateurs, la planification des pièces de rechange et les essais d’acceptation.
Une tarification en trois niveaux aide à éviter les hypothèses cachées. La Fourniture FOB couvre le package d’équipements usine et la documentation d’exportation. La Livraison CIF ajoute le fret et l’assurance jusqu’au port de destination. Le Clé en main EPC ajoute la gestion de l’installation locale, la mise en service, la formation, l’acceptation terrain et la documentation projet. Les acheteurs doivent demander à SOLARTODO de séparer le coût des équipements, la logistique, les travaux civils, l’installation, la configuration logicielle, le périmètre de garantie et la maintenance annuelle.
Les orientations de prix par volume peuvent être modélisées comme 50+ unités pour une remise de 5%, 100+ unités pour 10% et 250+ unités pour 15%, sous réserve de la configuration finale et de la logistique pays. Les conditions de paiement standard peuvent être 30% T/T plus 70% contre B/L, ou 100% L/C à vue. Un financement de projet peut être disponible pour les grands programmes au-dessus de $1,000K ; contactez [email protected] pour la qualification commerciale.
Le ROI doit être traité comme un modèle calibré par pilote, non comme une garantie. Un business case défendable compare la main-d’œuvre de patrouille de routine, le kilométrage des véhicules, la fréquence d’inspection, le temps de réponse, la vérification des incidents de sécurité et le coût d’armoires, de docks, de poteaux capteurs et de sites de communication séparés. Pour les grands campus, un scénario de planification prudent peut viser 20-40% de visites terrain de routine en moins après validation.
Selon l’IEA (2024), le scénario principal prévoit 5,500 GW de nouvelle capacité renouvelable d’ici 2030, tandis qu’au moins 1,650 GW de projets renouvelables avancés attendaient un raccordement au réseau. Cette statistique de file d’attente renforce l’intérêt d’une infrastructure hors réseau soigneusement cadrée sur les sites éloignés ou contraints en énergie, mais elle ne supprime pas la nécessité du dimensionnement des batteries et de la discipline des cycles de service.
Applications, guide de sélection et limites opérationnelles
Les meilleurs premiers déploiements BVLOS sont des corridors contrôlés de 2-20 km où la valeur d’inspection, l’urgence de sécurité, la couverture de communications et l’approbation réglementaire peuvent être validées ensemble.
Les cas d’usage pratiques comprennent la patrouille de périmètre portuaire, l’inspection de parc solaire, la surveillance de pipeline ou de ligne de clôture, la vérification d’urgence sur campus, les contrôles d’inventaire de cour industrielle, l’examen de l’état de routes ou de ponts, et la connaissance périmétrique des infrastructures critiques. Les projets solides ont des itinéraires répétitifs, des bénéfices mesurables en temps de réponse et un propriétaire de site capable de contrôler l’accès, la signalisation, les avis de confidentialité et les fenêtres de maintenance.
La sélection doit commencer par le concept d’exploitation. Les acheteurs doivent définir l’itinéraire, l’enveloppe d’altitude, la fréquence de lancement, le temps de station, les options d’atterrissage d’urgence, la couverture de communications, les seuils météorologiques et l’autorité de décision avant de choisir les options matérielles. Selon les directives FAA Part 107 waiver (2024), les demandeurs doivent décrire les risques opérationnels et les méthodes d’atténuation lorsqu’ils cherchent à opérer en dehors des règles standard.
| Facteur de sélection | Exigence prête pour pilote | Risque d’achat si ignoré |
|---|---|---|
| Budget énergétique | CIGS 0.8-1.1 kW DC de crête, stockage 5-20 kWh | Décharge batterie sous-estimée pendant les sorties consécutives |
| Voie réglementaire | Dérogation BVLOS, COA ou équivalent local | Aéronef immobilisé après livraison du matériel |
| Gouvernance des données | Données brutes traitées localement, métadonnées exportées | Objections liées à la confidentialité et coût de bande passante excessif |
| Fréquence de mission | Sorties par jour et cycles d’échange définis | Dock surdimensionné ou stockage sous-dimensionné |
| Communications | Liaisons redondantes et journaux d’événements | Perte de continuité de commande ou piste d’audit incomplète |
| Périmètre C-UAS | Démonstration uniquement, non létale et autorisée par un humain | Exposition juridique liée à des allégations d’atténuation interdites |
La maturité doit être séparée en 3 niveaux. Les éléments prêts matériel comprennent la structure du poteau, l’architecture énergétique, le placement des capteurs, l’architecture de service batterie et l’intégration edge-compute. Les éléments en phase pilote comprennent la gestion des opérations de drones, la surveillance environnementale, les analyses locales PTZ et le workflow edge OTATODO. Les éléments en position avancée comprennent l’atténuation C-UAS, la coordination robot air-sol, V2X, les entrées optionnelles de radars partenaires et l’automatisation complète de l’image opérationnelle commune.
La principale limite est qu’un réseau de poteaux intelligents ne peut pas, à lui seul, autoriser le vol BVLOS. Il peut réduire les frictions d’infrastructure, améliorer la capture de preuves et standardiser les opérations, mais les approbations restent propres à chaque juridiction. La météo, le vieillissement des batteries, les lacunes de communication, les limites de charge utile, la loi sur la confidentialité et l’acceptation communautaire doivent être inclus.
FAQ
Ces 10 réponses FAQ couvrent les approbations BVLOS, l’énergie hors réseau, la maintenance, les prix, la confidentialité et les limites C-UAS pour les équipes achats, en réponses de 40-80 mots.
Q: Que signifie BVLOS pour les opérations de drones avec poteaux intelligents ? A: BVLOS signifie que le drone opère au-delà de la vue directe non assistée du pilote dans le cadre d’un dossier de sécurité approuvé. Dans un réseau de poteaux intelligents, chaque nœud peut prendre en charge le lancement, la récupération, le tampon énergétique, la détection locale et les métadonnées de commande, mais l’opérateur a toujours besoin d’une autorisation propre à la juridiction, de contrôles de risques documentés et d’une supervision humaine pour l’approbation de mission.
Q: Comment SOLARTODO Sky Hub prend-il en charge les workflows BVLOS sans alimentation réseau ? A: SOLARTODO Sky Hub est conçu comme un poteau intelligent entièrement hors réseau utilisant le stockage batterie plus la recharge CIGS. La couche CIGS est une production complémentaire réaliste, environ 0.8-1.1 kW DC de crête et 6-9 kWh/day dans les régions fortement ensoleillées, tandis qu’un stockage de classe 5-20 kWh tamponne le service de drones, la détection, le calcul et les charges de communication.
Q: La vidéo brute peut-elle quitter le poteau pour des analyses cloud ? A: L’architecture prévue conserve les flux vidéo et capteurs bruts sur le poteau pour le traitement local. Seuls les enregistrements d’événements désidentifiés, l’état opérationnel, les alarmes, la télémétrie de santé et les journaux de mission doivent quitter le site. Cela réduit la demande de bande passante et soutient une conception de confidentialité orientée PDPL/LGPD, bien que la conformité juridique dépende toujours d’une revue locale du déploiement.
Q: Quelles approbations sont normalement nécessaires pour les opérations de drones BVLOS ? A: Les approbations dépendent du pays, de la classe d’espace aérien, du poids du drone, de l’altitude d’exploitation, de la densité de population et du concept de détection et d’évitement. Aux États-Unis, les opérations FAA Part 107 en dehors des limites de ligne de visée visuelle nécessitent une dérogation ou une autre autorité approuvée. Les équipes achats doivent budgéter la préparation du dossier de sécurité, les essais, la formation et l’engagement avec le régulateur.
Q: Quelle est la différence entre un dock de drone et un réseau de poteaux intelligents ? A: Un dock autonome dessert généralement un seul site de lancement, tandis qu’un réseau de poteaux intelligents distribue l’énergie, la détection, le calcul et l’état de mission sur plusieurs nœuds. Pour les corridors BVLOS, ce réseau peut améliorer la couverture, la redondance et l’accès à la maintenance. SOLARTODO positionne Sky Hub comme un poteau intelligent pur, et non comme un produit d’éclairage.
Q: Comment les acheteurs doivent-ils estimer le ROI des réseaux de poteaux intelligents BVLOS ? A: Le ROI doit comparer les heures de patrouille évitées, les déplacements de camions réduits, la vérification plus rapide des alarmes, l’amélioration de la fréquence d’inspection des actifs et la réduction des travaux d’armoires ou de fondations autonomes. Pour les premiers pilotes, utilisez des hypothèses prudentes telles que 20-40% de visites d’inspection de routine en moins après validation, puis ajustez selon le taux de réussite mesuré des missions, le débit batterie, le coût de maintenance et la charge d’approbation.
Q: Le système inclut-il une atténuation counter-UAS ? A: Le concept permet la coordination C-UAS uniquement comme détection, suivi et coordination de réponse non létaux et autorisés par un humain. Les workflows de démonstration peuvent inclure une capture aérienne simulée par filet ou une dissuasion par approche rapprochée par un drone ami. Le poteau n’est pas décrit comme un matériel radar, et l’atténuation doit éviter la force interdite, les méthodes de déni de signal ou la réponse hostile automatisée.
Q: Quelle maintenance est requise pour un poteau BVLOS hors réseau ? A: La maintenance doit couvrir la santé des batteries, l’état de surface CIGS, les connecteurs, les joints d’étanchéité, le fonctionnement du magasin de batteries de drones, les interfaces de charge, l’étalonnage PTZ, les capteurs environnementaux et les journaux edge-compute. Un plan typique comprend des contrôles de santé à distance chaque semaine, une inspection terrain tous les 3-6 mois et une inspection post-événement après météo sévère ou défauts d’arrimage anormaux.
Q: Comment la tarification EPC est-elle structurée pour les grands projets ? A: Les projets B2B SOLARTODO doivent être demandés sous forme de devis Fourniture FOB, Livraison CIF ou Clé en main EPC. L’EPC ajoute l’étude de site, les fondations, l’installation, la mise en service, la formation et la gestion de projet à la fourniture d’équipements. Les orientations de volume peuvent s’appliquer à 50, 100 et 250 unités, tandis que les conditions de paiement peuvent utiliser 30% T/T plus 70% contre B/L ou 100% L/C à vue.
Q: Quand un acheteur doit-il choisir un déploiement pilote plutôt qu’un déploiement complet ? A: Choisissez un pilote lorsque les approbations BVLOS, la couverture de communications locale, les règles C-UAS, les exigences de gouvernance des données ou les cycles de service des drones ne sont pas prouvés. Un pilote de 3-6 mois peut valider le rendement énergétique, le taux d’achèvement des missions, le workflow d’alarme, les contrôles de confidentialité et la charge de maintenance avant de s’engager dans un déploiement multisite ou un financement au-dessus de $1,000K.
Références
Ces 8 références ancrent les approbations BVLOS, les hypothèses d’énergie renouvelable, la modélisation PV, l’identification à distance et les choix de sécurité électrique auprès d’autorités reconnues pour la planification 2024-2026.
- Programme FAA UAS BEYOND (2025) : rapporte les résultats de la Phase 1 avec 70,563 vols totaux et 48,383 vols BVLOS, la Phase 2 se poursuivant jusqu’en 2029. https://www.faa.gov/uas/programs_partnerships/beyond
- FAA Part 107 Waivers (2024) : explique les exigences de dérogation pour les opérations hors des limites Part 107, y compris les contraintes de ligne de visée visuelle. https://www.faa.gov/uas/commercial_operators/part_107_waivers
- FAA Remote Identification of Drones (2025) : définit Remote ID comme l’identification diffusée et les informations de localisation pour les drones en vol. https://www.faa.gov/uas/getting_started/remote_id
- IEA Renewables 2024 (2024) : prévoit 5,500 GW de nouvelle capacité renouvelable d’ici 2030 et identifie le solaire PV comme 80% de la croissance renouvelable. https://www.iea.org/reports/renewables-2024
- IRENA Renewable Capacity Statistics 2026 (2026) : rapporte 692 GW d’ajouts renouvelables en 2025, une part de 85.6% de l’expansion de capacité et 511 GW d’ajouts solaires. https://www.irena.org/News/pressreleases/2026/Apr/Near-700-GW-Surge-in-2025-Proves-Renewable-Energy-Resilience
- NREL PVWatts V8 API (2026) : documente les jeux de données de ressource solaire PVWatts V8, les entrées de capacité de 0.05-500,000 kW, les sorties horaires et la modélisation des performances photovoltaïques. https://developer.nrel.gov/docs/solar/pvwatts/v8/
- IEEE 2030.5-2018 (2018) : protocole d’application Smart Energy Profile pour les ressources énergétiques distribuées et les communications avec les services publics, pertinent pour l’intégration énergétique en périphérie. https://standards.ieee.org/ieee/2030.5/5897/
- ASTM F3411-22a (2022) : spécification standard pour Remote ID et le suivi des systèmes d’aéronefs sans pilote, pertinente pour les workflows interopérables d’identification de drones. https://www.astm.org/f3411-22a.html
Conclusion
Les réseaux de poteaux intelligents BVLOS sont les plus solides comme infrastructure validée par pilote, combinant stockage de 5-20 kWh, recharge de 6-9 kWh/day et contrôle de mission piloté par approbation.
Conclusion opérationnelle : SOLARTODO Sky Hub doit être spécifié comme un poteau intelligent pur entièrement hors réseau pour des corridors BVLOS contrôlés, et non comme un actif d’éclairage ou une plateforme solaire illimitée. Pour les projets au-dessus de 50 nœuds, les acheteurs doivent demander un devis à trois niveaux, valider un pilote de 3-6 mois et passer à l’échelle uniquement après preuve du rendement énergétique, des journaux de mission, du coût de maintenance et du workflow d’autorisation.
À propos de SOLARTODO
SOLARTODO est un fournisseur mondial de solutions intégrées spécialisé dans les systèmes de production d’énergie solaire, les produits de stockage d’énergie, l’éclairage public intelligent et l’éclairage public solaire, les systèmes intelligents de sécurité et de liaison IoT, les pylônes de transmission électrique, les tours de communication télécom et les solutions d’agriculture intelligente pour les clients B2B du monde entier.
Procurement paths
À Propos de l'Auteur

Cinn Song
Founder & Chief Solutions Architect
Cinn Song founded SOLARTODO LIMITED and leads its smart-city infrastructure engineering — from solar, storage and integrated smart poles to the company's push into physical-AI city edge nodes: pole-mounted edge computing, vertical LLMs for smart cities, drone-based O&M with autonomous battery swapping, robotic maintenance, and high-speed counter-UAS interception. Since 2010, he has directed turnkey EPC + BOT delivery across 50+ countries, including telecom monopole supply for national grid operators, off-grid solar street-lighting for African municipalities, and integrated smart-pole programs for Gulf smart cities.
Citer cet article
Cinn Song. (2026). Opérations de drones au-delà de la ligne de visée depuis des réseaux intelligents…. SOLARTODO. Retrieved from https://solartodo.com/fr/knowledge/beyond-visual-line-of-sight-drone-operations-from-smart-pole-networks
@article{solartodo_beyond_visual_line_of_sight_drone_operations_from_smart_pole_networks,
title = {Opérations de drones au-delà de la ligne de visée depuis des réseaux intelligents…},
author = {Cinn Song},
journal = {SOLARTODO Knowledge Base},
year = {2026},
url = {https://solartodo.com/fr/knowledge/beyond-visual-line-of-sight-drone-operations-from-smart-pole-networks},
note = {Accessed: 2026-06-21}
}Published: June 21, 2026 | Available at: https://solartodo.com/fr/knowledge/beyond-visual-line-of-sight-drone-operations-from-smart-pole-networks
Abonnez-vous à Notre Newsletter
Recevez les dernières nouvelles et aperçus sur l'énergie solaire directement dans votre boîte de réception.
Voir Tous les Articles