
Un poteau d’IA urbaine, ou nœud edge Physical-AI SOLARTODO Sentinel, est un poteau intelligent intégré qui combine inférence edge, détection, alimentation résiliente, station d’accueil pour drone et robot de patrouille arrimé. Dans ce pilote proposé pour la police d’Athènes, le nœud soutient les patrouilles nocturnes post-catastrophe lorsque le service réseau est peu fiable, en utilisant l’IA embarquée pour trier les événements et réduire les fausses alertes.
1. Contexte du pilote : police en ville montagneuse sous conditions de panne
Ce rapport pilote décrit une configuration proposée et illustrative pour le déploiement de poteaux nœuds edge Physical-AI SOLARTODO Sentinel à Athènes, en Grèce, sous réserve de confirmation finale par l’ingénierie. Le projet est cadré autour d’une mission de patrouille nocturne de police plutôt que d’une démonstration produit : maintenir une observation ciblée de sécurité publique active après une catastrophe lorsque l’accès réseau est peu fiable, que la visibilité au niveau de la rue est réduite et que les équipes de patrouille doivent couvrir un terrain difficile.
Athènes est une capitale dense située dans un bassin et façonnée par les montagnes et collines environnantes, notamment l’Hymette, le Pentélique, le Parnitha, le Lycabette, ainsi que les itinéraires qui montent entre quartiers urbains, franges périurbaines, parcs, corridors d’infrastructure et rues résidentielles escarpées. Pour la planification policière, ce profil de ville montagneuse est important. Après des intempéries sévères, un incendie, une inondation, une érosion de pente, un blocage routier ou une perturbation des services publics, un petit incident peut générer de nombreuses alertes provenant de caméras, de résidents, de points d’accès et d’agents sur le terrain. La nuit, le coût d’un mauvais envoi d’équipe augmente, car les équipes peuvent être dirigées vers des rues étroites, des pentes mal éclairées, des segments routiers endommagés ou des lieux où les communications sont intermittentes.
Le déclencheur saisonnier de ce pilote proposé est une fenêtre de résilience en saison de typhons utilisée comme discipline de planification par des programmes d’urgence multinationaux. Athènes n’est pas présentée ici comme une ville tropicale exposée aux typhons. La pertinence est opérationnelle : les parties prenantes de la police et des secours veulent évaluer si un nœud edge urbain peut rester utile pendant une posture de saison de tempêtes, lorsque la connectivité dégradée, le vent, la pluie, les débris et l’instabilité de l’alimentation peuvent produire à la fois de véritables incidents et des alertes bruitées.
Le mode de déploiement proposé est un déploiement complémentaire post-catastrophe. Le poteau Sentinel n’est pas positionné comme un remplacement généralisé, à l’échelle de la ville, de l’infrastructure existante. Il est proposé comme nœud d’appoint pour les emplacements où la vidéosurveillance fixe, le backhaul radio, l’éclairage public ou la couverture de patrouille habituelle peuvent être insuffisants après une perturbation. À Athènes, les emplacements candidats pourraient inclure des approches routières face aux montagnes, des places publiques proches de rues d’accès escarpées, des lisières de parcs, des pôles d’échanges de mobilité, des cours de services municipaux et des périmètres temporaires de zones de commandement. Les sites précis, les quantités, les travaux de génie civil, les permis et les hypothèses de couverture nécessiteraient une étude locale et une confirmation d’ingénierie.
La partie prenante principale de ce rapport est l’acheteur police : commandants opérationnels, équipes technologiques de sécurité publique, responsables des achats et personnels de liaison d’urgence. Leur question centrale n’est pas de savoir si le poteau possède des modules avancés ; elle est de savoir si le nœud intégré peut aider un poste de patrouille nocturne à distinguer une véritable préoccupation terrain d’une fausse alerte pendant une panne réseau.
2. Rôle proposé de Sentinel : patrouille nocturne menée par robot avec décisions edge
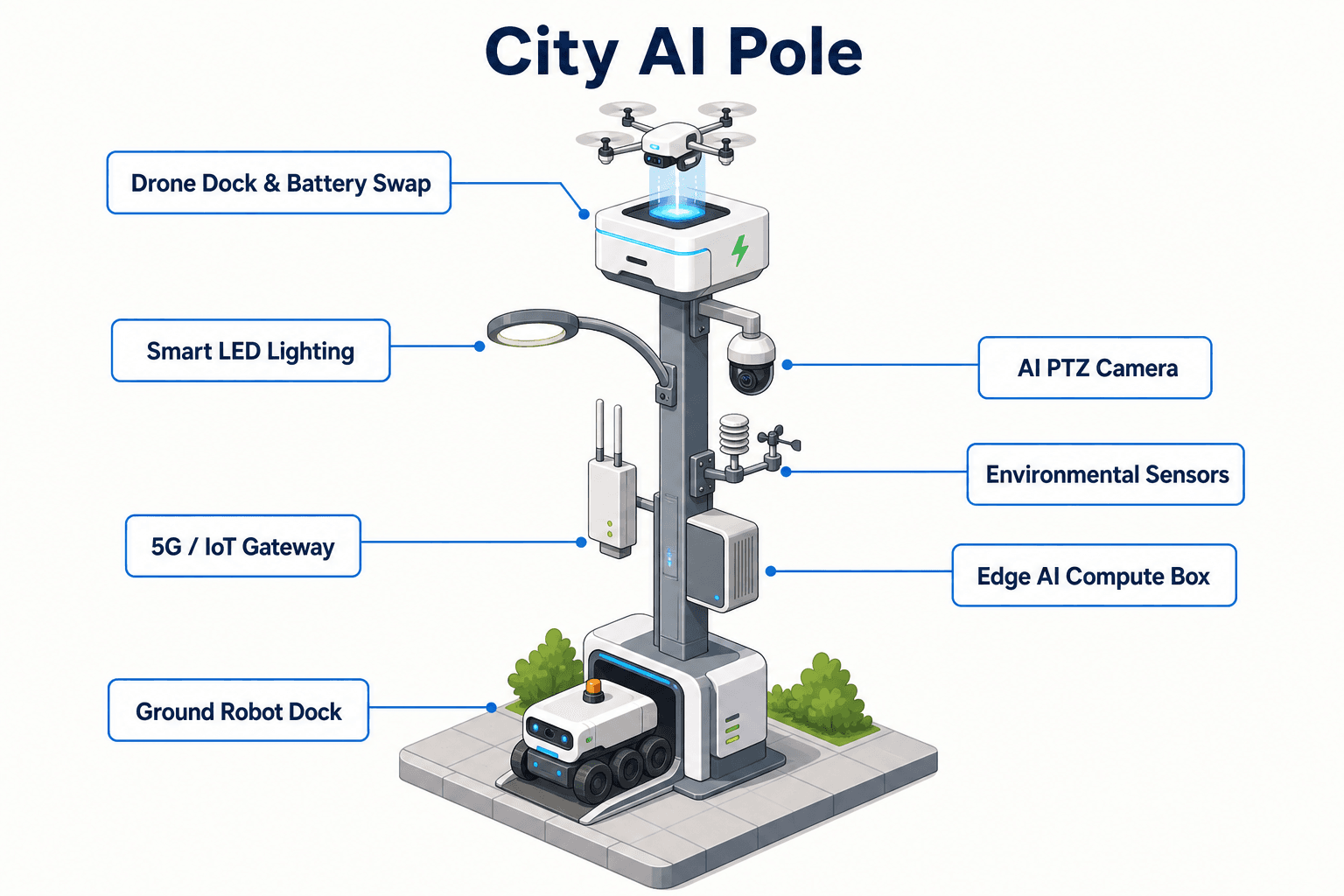
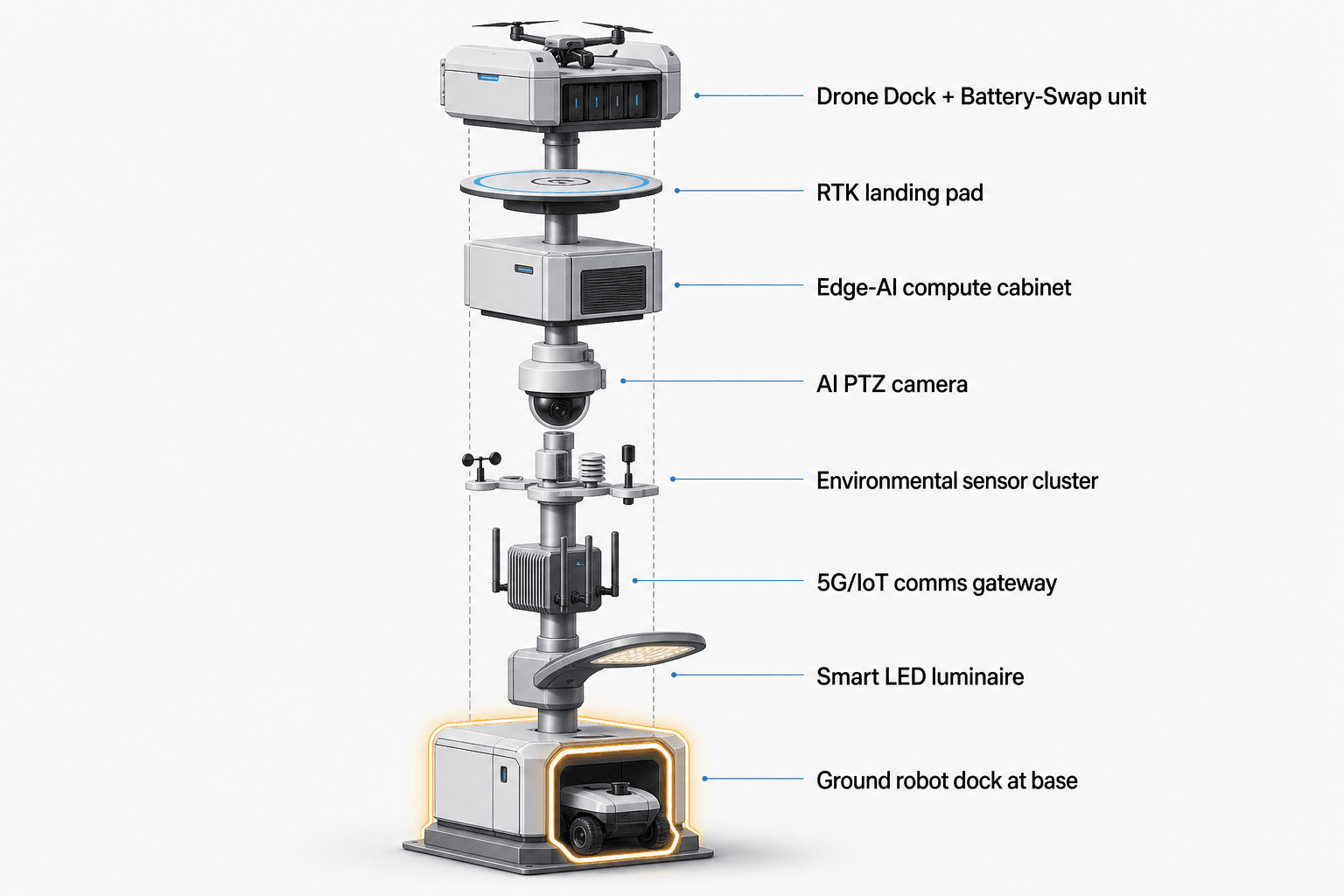
La mission proposée pour SOLARTODO Sentinel à Athènes est une patrouille nocturne menée par robot autour d’une zone complémentaire post-catastrophe définie. Le Sentinel est un poteau intelligent mince, cylindrique ou octogonal, avec un corps en métal brossé, une section photovoltaïque centrale bleu nuit et des anneaux d’accent LED cyan. Le poteau intègre une unité drone supérieure, une station d’accueil pour robot de patrouille au sol, du calcul edge, de la détection et des options d’alimentation résiliente dans un seul actif urbain. Il n’est pas proposé comme une vente de drone autonome ou une vente de robot autonome ; la valeur provient du poteau urbain intégré.
Pour le scénario de patrouille nocturne, l’unité au sol est le point d’attention opérationnel. Un robot de patrouille générique quadrupède ou à roues reste arrimé à la base du poteau pour l’auto-recharge, puis parcourt un court itinéraire d’inspection lorsque le système d’IA edge signale une condition qui mérite une confirmation locale. Cet itinéraire pourrait être configuré autour du périmètre d’une place, d’un portail de voie de service, d’une approche de rue bloquée, d’un escalier à flanc de colline ou d’une façade d’infrastructure, sous réserve de validation du terrain. L’objectif du robot n’est pas de remplacer le jugement policier. Son rôle est de fournir un second examen plus proche avant qu’un agent ne soit envoyé dans la zone ou avant qu’une alerte ne soit escaladée vers une salle de contrôle.
La couche de détection du poteau soutient ce flux de travail. Une caméra PTZ surveille la zone de patrouille. Les capteurs météorologiques et environnementaux fournissent des conditions locales qui aident à expliquer si un mouvement, des débris, un changement d’éclairage ou la pluie peuvent affecter la scène. Un radar 4D ou un LiDAR optionnel peut être envisagé lorsque la ligne de visée, l’obscurité, la fumée ou les surfaces réfléchissantes compliquent une interprétation fondée uniquement sur la caméra. Tous les modules optionnels seraient sélectionnés selon les conditions du site, les exigences de confidentialité, la politique opérationnelle de la police et la confirmation d’ingénierie.
Au sommet du poteau, une station d’accueil ou un nid de drone SOLARTODO blanc avec toit en coque abrite un quadricoptère générique. Le drone dispose d’une plateforme d’atterrissage RTK de précision et d’un magasin de batteries à échange à chaud pour un changement rapide et automatisé des batteries afin de minimiser les temps d’arrêt. Dans le cadrage de ce pilote athénien, le drone est un outil supplémentaire d’inspection en hauteur. Il peut être lancé lorsque le poste de police a besoin d’un point de vue plus élevé sur une route bloquée, une pente endommagée, une cour inaccessible ou une bordure de périmètre. Aucun temps exact d’échange de batterie, durée de vol, portée ou temps de réponse n’est supposé ici.
L’armoire de calcul edge est centrale dans le scénario de panne. Elle contient un accélérateur d’IA edge embarqué dans une armoire ventilée montée sur le poteau. L’inférence s’effectue sur l’appareil, soutenant une classification à faible latence sans exiger que chaque image ou événement accomplisse un aller-retour cloud. C’est important lorsque le service réseau est instable. Si la connectivité est dégradée, le nœud peut continuer à classifier les événements localement, noter la confiance, déclencher le flux robot ou drone selon la politique définie, et conserver les enregistrements pour une synchronisation ultérieure lorsque cela est autorisé.
3. Configuration centrée sur l’alimentation pour la résilience en panne réseau
Le module central de ce pilote est l’alimentation, car la réponse à une panne réseau n’est crédible que si le nœud peut rester utile lorsque l’environnement global est sous contrainte. Dans des conditions post-catastrophe à Athènes, un poteau intelligent qui dépend entièrement d’un backhaul stable et d’une alimentation secteur ininterrompue peut devenir un autre angle mort. La configuration Sentinel proposée traite donc l’alimentation comme la base de la détection, de l’inférence, de l’arrimage du robot et de l’enregistrement des événements.
SOLARTODO Sentinel peut être configuré pour l’alimentation réseau ou une alimentation hybride éolien-solaire. Pour ce rapport pilote, le concept de planification recommandé est une connexion au réseau lorsqu’elle est disponible, avec une configuration hybride éolien-solaire évaluée pour les emplacements exposés aux vents de montagne ou lorsque les exigences de résilience le justifient. La section photovoltaïque centrale bleu nuit contribue à la stratégie d’alimentation intégrée du poteau, tandis que l’équilibre final entre apport réseau, contribution solaire, composante éolienne, stockage et gestion de charge serait conçu pour chaque site. Aucune durée d’autonomie n’est revendiquée dans ce rapport.
La gestion de l’alimentation affecte directement le flux de travail du robot. Le robot de patrouille s’arrime à la base du poteau avec auto-recharge, ce qui permet aux équipes de police de traiter le nœud comme une station prête plutôt que comme un appareil terrain autonome nécessitant une manipulation manuelle des batteries après chaque mission. Dans un contexte de patrouille nocturne, cela signifie qu’un poste d’intervention peut réserver le robot aux événements de confirmation plutôt qu’à une errance continue. C’est important pour l’évaluation du taux de fausses alertes : le robot doit être envoyé lorsque le score edge et les règles opérationnelles justifient un second examen, et non à chaque fluctuation de capteur.
L’alimentation affecte également le sous-système drone. Le toit en coque de la station d’accueil supérieure protège le quadricoptère arrimé, tandis que le magasin de batteries à échange à chaud vise à réduire le temps d’arrêt entre les missions sans obliger la police ou le personnel de maintenance à grimper au poteau ou à manipuler les batteries de l’aéronef à chaque cycle. Dans ce pilote, le drone reste un module contrôlé au sein du poteau Sentinel intégré, avec des autorisations d’exploitation, des seuils météorologiques et des règles de vol propres au site à confirmer par l’acheteur et les autorités compétentes.
Pendant une panne réseau, l’armoire d’IA edge doit disposer d’une stabilité d’alimentation suffisante pour poursuivre l’inférence locale et la journalisation des événements. La caméra PTZ, le capteur météo, le radar ou LiDAR optionnel, les accents d’état LED, la station robot, la station drone et les équipements de communication tirent tous leur alimentation du même plan opérationnel. Un pilote pratique à Athènes testerait donc des politiques de délestage : par exemple, conserver l’inférence caméra principale et la charge du robot tout en limitant l’éclairage non essentiel ou en suspendant la disponibilité du drone dans certaines conditions d’alimentation. Ce sont des décisions de configuration, pas des revendications produit fixes.
Le bénéfice opérationnel attendu est la continuité du triage. Lorsque les agents reçoivent de nombreuses alertes après une tempête, un incendie ou une défaillance d’infrastructure, le poteau Sentinel peut évaluer localement le contexte visuel et environnemental, appeler le robot pour une confirmation au sol lorsque cela est configuré, et stocker les preuves d’événements même si la connectivité réseau est intermittente. La conception de l’alimentation est ce qui maintient cette boucle disponible assez longtemps pour être utile.
4. Méthode KPI : évaluation du taux de fausses alertes, sans résultats revendiqués
Le cadrage KPI de ce pilote athénien est le taux de fausses alertes. Le rapport ne revendique pas de réductions obtenues, de pourcentages de détection, de chiffres de latence, de zone de couverture ou de résultats de déploiement. Il définit plutôt comment un acheteur police pourrait évaluer si la configuration Sentinel proposée améliore la qualité de décision des patrouilles nocturnes dans des conditions de panne réseau.
Le problème de référence est familier dans la police post-catastrophe. La nuit, une caméra PTZ peut voir un mouvement d’ombre, des débris poussés par le vent, des reflets sur de la pierre mouillée, des animaux, une intrusion non autorisée, des barrières endommagées ou une activité humaine réelle. Des résidents peuvent signaler des mouvements suspects près de rues endommagées ou d’espaces publics fermés. Un poste de contrôle doit décider s’il faut dépêcher des agents, demander à une unité proche de vérifier, consulter une autre caméra ou ignorer l’événement. Lorsque le service réseau est dégradé, l’analyse cloud, la revue vidéo distante et la coordination centrale peuvent être ralenties ou indisponibles. Cela augmente le risque que les fausses alertes consomment l’attention de la police pendant que les événements réels attendent.
Dans le flux de travail Sentinel proposé, l’évaluation du taux de fausses alertes comparerait les alertes brutes aux alertes notées par l’edge, aux alertes confirmées par robot et aux résultats validés par les agents. L’acheteur police définirait ce qui compte comme alerte exploitable avant le début du pilote. Par exemple, un événement exploitable pourrait nécessiter une présence non autorisée dans une zone restreinte post-catastrophe, un mouvement répété près d’une entrée critique, le retrait d’un objet d’une zone municipale de rassemblement ou un danger de sécurité observé sur un itinéraire de patrouille. Le rôle du poteau Sentinel est d’ajouter un contexte local avant l’escalade.
Une évaluation pratique éviterait de traiter l’IA edge comme l’autorité finale. L’accélérateur d’IA edge embarqué classifie et note les événements sur le poteau. Si le score dépasse les seuils configurés, le robot au sol peut effectuer un itinéraire d’inspection plus rapproché. Si une perspective plus élevée est justifiée et autorisée, le quadricoptère peut décoller de la station SOLARTODO pour une vue aérienne. Le poste de contrôle reçoit ensuite un enregistrement structuré : heure, déclencheur capteur, catégorie IA, bande de confiance ou score de politique, statut de confirmation par robot, statut de confirmation par drone lorsqu’il est utilisé, et disposition opérateur.
Pour Athènes, le KPI important n’est pas seulement la réduction du nombre d’alertes ; c’est la diminution des mauvaises escalades pendant un service nocturne sous pression. Un système qui supprime trop d’événements serait inacceptable. Par conséquent, le pilote doit évaluer le taux de fausses alertes parallèlement à la revue des événements manqués, à la fréquence des contournements par les agents, à l’utilité des missions robot, à la stabilité de l’état d’alimentation, à la durée de panne réseau et à l’exhaustivité des enregistrements. La ville et l’acheteur police fixeraient des seuils cibles pendant l’achat et les réviseraient après l’étude de site et l’examen juridique.
La période d’évaluation proposée doit inclure une simulation planifiée de panne, une exploitation nocturne, des variations météorologiques lorsque disponibles, et des événements de test contrôlés. Elle doit également inclure des règles de confidentialité et de conservation des données, car l’usage policier de la détection mobile dans l’espace public doit être régi par une politique, une auditabilité et des autorisations opérationnelles claires. Ce rapport présente uniquement des données de planification cibles, pas des résultats opérationnels.
5. Modèle opérationnel du pilote et parcours de décision acheteur
Le pilote proposé à Athènes serait géré comme un rapport pilote opérationnel avec des questions d’acceptation définies. Premièrement, le poteau Sentinel peut-il maintenir une boucle utile détecter-décider-agir-enregistrer lorsque le réseau est dégradé ? Deuxièmement, le robot au sol peut-il améliorer la confiance de la police avant l’envoi d’agents dans une zone de patrouille nocturne post-catastrophe ? Troisièmement, la configuration d’alimentation maintient-elle les modules les plus importants disponibles selon les priorités locales ? Quatrièmement, le flux de travail réduit-il la part d’alertes que la police classera ensuite comme fausses, sans masquer de risques réels ?
Le pilote doit commencer par la sélection du site et l’étude d’ingénierie. Les parties prenantes de la police proposeraient des emplacements complémentaires candidats en fonction des plans de réponse aux catastrophes, de la pression des patrouilles nocturnes et des vulnérabilités de communication connues. Les équipes d’ingénierie évalueraient les conditions de montage, les options d’alimentation, l’exposition au vent, l’accès solaire, l’adéquation des itinéraires robot, les contraintes d’exploitation du drone, les lignes de visée des capteurs, la ventilation de l’armoire, l’accès maintenance et les exigences de conformité. La configuration finale resterait soumise à confirmation d’ingénierie.
Ensuite, l’acheteur définirait les règles opérationnelles. Ces règles doivent préciser quand la caméra PTZ peut balayer, quand le robot peut quitter sa station, quels itinéraires il peut emprunter, quand le drone peut décoller, ce qui se passe lorsque l’alimentation descend sous un état configuré, et quelles preuves sont stockées localement. Les règles doivent également définir les seuils d’escalade pour le personnel de police. L’objectif est une automatisation disciplinée : le nœud aide la police à filtrer et confirmer les événements, mais la politique policière détermine l’escalade.
La formation doit être pratique et fondée sur des scénarios. Les opérateurs doivent comprendre ce que l’armoire d’IA edge fait localement, ce qu’elle ne décide pas, comment la confirmation robot est affichée, comment le module drone est contrôlé et comment les enregistrements sont examinés après le retour de la connectivité. Les équipes de maintenance ont besoin de procédures pour inspecter le corps du poteau, la section photovoltaïque centrale, les anneaux LED, le capteur météo, la caméra PTZ, la station robot, la station drone, le toit en coque, le magasin à échange à chaud et l’armoire de calcul ventilée.
La décision d’achat doit être fondée sur les preuves du pilote plutôt que sur des affirmations générales. Un acheteur police doit déterminer si la configuration Sentinel proposée apporte suffisamment de valeur dans le terrain athénien spécifique et le scénario de panne pour justifier une conception d’ingénierie plus poussée. Si les données du pilote montrent que les alertes restent bruitées, que les itinéraires robot sont impraticables ou que les priorités d’alimentation sont mal alignées, la configuration doit être ajustée avant d’envisager tout déploiement plus large. Si le pilote démontre une voie crédible vers un taux de fausses alertes plus faible et un meilleur triage des patrouilles nocturnes, l’étape suivante serait un dossier formel de conception site par site avec autorisations, travaux de génie civil, intégration et politique opérationnelle définis en détail.
Configuration du système
| Paramètre | Configuration |
|---|---|
| Facteur de forme du poteau | Poteau urbain mince, cylindrique ou octogonal, avec corps en métal brossé, section photovoltaïque centrale bleu nuit et anneaux d’accent LED cyan. |
| Calcul IA edge | Armoire ventilée montée sur le poteau avec accélérateur d’IA edge embarqué pour l’inférence sur l’appareil et l’exploitation à faible latence sans aller-retour cloud obligatoire. |
| Unité de patrouille au sol | Robot de patrouille générique quadrupède ou à roues arrimé à la base du poteau avec auto-recharge pour des itinéraires configurés de confirmation de patrouille nocturne. |
| Unité drone | Station drone SOLARTODO blanche à coque avec quadricoptère générique, plateforme d’atterrissage RTK de précision et magasin automatisé de batteries à échange à chaud. |
| Ensemble de détection | Caméra PTZ, capteur météorologique et environnemental, avec radar 4D ou LiDAR optionnel sous réserve des conditions du site et de la confirmation d’ingénierie. |
| Configuration d’alimentation | Connexion au réseau ou configuration hybride éolien-solaire, avec gestion finale de la charge et hypothèses de stockage déterminées par l’ingénierie du site. |
| Mode de déploiement | Nœud complémentaire post-catastrophe pour le triage des patrouilles nocturnes de police dans des emplacements sélectionnés d’Athènes sujets aux pannes, sous réserve de permis et de politique opérationnelle. |
Comment ça marche
- La caméra PTZ sur poteau et les capteurs environnementaux signalent une anomalie nocturne dans la zone complémentaire post-catastrophe.
- L’accélérateur d’IA edge embarqué classifie l’événement localement et applique la politique d’escalade définie par la police.
- Si les seuils configurés sont atteints, le robot de patrouille arrimé quitte la base pour effectuer un court itinéraire de confirmation.
- Si une vue en hauteur est autorisée, le quadricoptère générique décolle de la station à coque SOLARTODO pour une inspection supplémentaire.
- Le nœud enregistre le déclencheur capteur, le score IA, la confirmation robot, la vue drone optionnelle, l’état d’alimentation et la disposition opérateur.
- Lorsque la connectivité est disponible, l’enregistrement se synchronise pour revue policière et analyse du taux de fausses alertes.
Hypothèses de planification (indicatives)
Données de planification illustratives que l’acheteur peut recalculer : indicateurs cibles, pas des résultats obtenus. Sous réserve de confirmation finale d’ingénierie.
| Indicateur | Hypothèse de planification | Valeur indicative |
|---|---|---|
| Main-d’œuvre d’inspection | La confirmation par robot remplace une partie des rondes manuelles de vérification nocturne dans la zone pilote sélectionnée. | ~5 à 10 contrôles de patrouille par semaine automatisés pour comparaison de planification. |
| Revue des fausses alertes | Les alertes brutes des capteurs sont comparées aux alertes notées par l’edge et confirmées par robot avant escalade policière. | Bande de réduction cible à définir par l’acheteur, par ex. incréments d’environ ~10 % pour l’évaluation. |
| Continuité en panne | L’inférence locale se poursuit pendant les tests planifiés de dégradation réseau sans dépendre d’un aller-retour cloud pour chaque événement. | ~1 exercice de panne par mois pendant la fenêtre pilote. |
| Charge de travail opérateur | Le personnel du poste de contrôle examine des enregistrements d’événements structurés au lieu d’alertes vidéo uniquement non filtrées. | ~3 catégories d’alertes priorisées pour la notation pilote. |
| Résilience énergétique | La configuration réseau ou hybride éolien-solaire est évaluée par rapport à la charge sélectionnée des capteurs, du robot, de la station et du calcul edge. | ~2 profils d’alimentation comparés pendant la planification d’ingénierie. |
Équipements déployés
- Corps de poteau intelligent SOLARTODO Sentinel avec section photovoltaïque centrale et anneaux d’accent LED
- Armoire ventilée d’inférence IA edge montée sur poteau avec accélérateur d’IA edge embarqué
- Ensemble caméra PTZ
- Ensemble de capteurs météorologiques et environnementaux
- Module radar 4D ou LiDAR optionnel
- Station drone SOLARTODO blanche avec toit en coque, plateforme d’atterrissage RTK, quadricoptère générique et magasin de batteries à échange à chaud
- Robot de patrouille générique quadrupède ou à roues arrimé avec base d’auto-recharge
- Interface d’alimentation réseau ou hybride éolien-solaire, sous réserve de l’ingénierie du site
Questions fréquentes
S’agit-il d’un déploiement réel achevé à Athènes avec des résultats mesurés ?
Non. Il s’agit d’une configuration pilote B2B proposée et illustrative pour la planification policière à Athènes, sous réserve de confirmation finale par l’ingénierie. Elle ne revendique pas de quantités installées, de réduction obtenue des fausses alertes, de zone de couverture, de performance de latence, d’approbation client, de certification ou de résultats opérationnels. Les KPI décrits sont des métriques d’évaluation cibles qu’un acheteur peut définir, tester et recalculer.
Pourquoi le pilote est-il centré sur le robot de patrouille plutôt que sur le drone ?
Le scénario opérationnel est une patrouille nocturne de police après une catastrophe, où un second examen au niveau du sol peut aider à déterminer si une alerte mérite l’envoi d’agents. Le robot est arrimé à la base du poteau avec auto-recharge et peut être configuré pour de courts itinéraires de confirmation. Le drone reste une partie du nœud Sentinel intégré, mais il est traité comme un module supplémentaire d’inspection en hauteur.
Comment le nœud Sentinel aide-t-il pendant une panne réseau ?
Le poteau comprend un accélérateur d’IA edge embarqué sur poteau dans une armoire ventilée, de sorte que l’inférence peut se produire localement sans exiger que chaque événement accomplisse un aller-retour cloud. Pendant une connectivité dégradée, le nœud peut continuer à noter les événements, déclencher les actions robot ou drone configurées, et enregistrer des preuves structurées pour une revue ultérieure, selon la politique locale et la disponibilité de l’alimentation.
Qu’est-ce qui fait de l’alimentation l’enjeu de conception central pour ce pilote athénien ?
La patrouille nocturne post-catastrophe ne fonctionne que si la détection, l’inférence locale, l’arrimage du robot et l’enregistrement des événements restent disponibles lorsque les conditions urbaines sont instables. La configuration Sentinel proposée peut utiliser l’alimentation réseau ou une approche hybride éolien-solaire, avec la section photovoltaïque centrale et la conception finale de l’alimentation conçues autour de l’exposition locale, des priorités de charge et des exigences de résilience.
Comment la police doit-elle évaluer le taux de fausses alertes sans surestimer les résultats ?
L’acheteur doit définir une alerte exploitable avant le début du pilote, puis comparer les alertes brutes, les alertes notées par l’edge, les alertes confirmées par robot et les résultats validés par les agents. L’évaluation doit également suivre la revue des événements manqués, les contournements opérateur, l’état d’alimentation et l’exhaustivité des enregistrements. Toute amélioration ne doit être rapportée qu’après des tests contrôlés et une validation opérationnelle.
Le déploiement peut-il inclure un radar ou un LiDAR à Athènes ?
Un radar 4D ou un LiDAR optionnel peut être envisagé lorsque la détection par caméra seule peut être limitée par l’obscurité, la fumée, les reflets, la météo ou un terrain complexe. L’inclusion doit suivre une étude de site, une revue de confidentialité, une conception d’intégration et une confirmation d’ingénierie. La base proposée inclut déjà une caméra PTZ et une détection météorologique ou environnementale.
SOLARTODO Sentinel est-il vendu ici comme un système drone ou robot séparé ?
Non. L’article traite SOLARTODO Sentinel comme un poteau urbain intégré : corps du poteau, calcul edge, détection, alimentation, station drone et robot de patrouille arrimé fonctionnent comme un seul nœud edge Physical-AI. Le drone et le robot sont des modules génériques au sein de la configuration du poteau urbain, et non des produits de marque promus séparément.
Pour aller plus loin
- Gamme de mâts City AI / éclairage public intelligent
- Plus de cas de déploiement de ville intelligente
- Parlez à notre équipe d’ingénierie
Vous planifiez un déploiement d’IA physique similaire pour rues, campus ou espaces publics ? Demander une consultation d’ingénierie