
Un poteau d'IA urbaine est un nœud périphérique urbain d'IA physique sans éclairage qui combine stockage d'énergie hors réseau, calcul en périphérie, détection, opérations de drones et support de robots au sol dans une station au format poteau. Au Caire, SOLARTODO Sentinel Sky Hub est proposé pour les patrouilles d'événements temporaires liés à l'économie nocturne, afin d'aider la police à collecter des métadonnées de preuves locales et à coordonner les réponses autorisées sans envoyer de vidéo brute hors du poteau.
1. Contexte de l'incident : patrouille de l'économie nocturne au Caire
L'économie nocturne de tourisme culturel du Caire crée un schéma de sécurité exigeant : flux piétons denses, bus et véhicules privés arrivant près des quartiers patrimoniaux, vendeurs et visiteurs se déplaçant dans des accès étroits, et périmètres d'événements temporaires pouvant évoluer au cours d'une même soirée. La mission de la police n'est pas simplement de surveiller une ligne fixe. Elle consiste à comprendre ce qui s'est passé, préserver des preuves utiles et réduire le délai entre une anomalie et une réponse de terrain autorisée. Cette étude de cas proposée de revue d'incident place des poteaux SOLARTODO Sentinel Sky Hub à des points de contrôle temporaires autour de corridors de tourisme culturel, tels que les accès aux marchés patrimoniaux, les zones de rassemblement proches des musées, les points d'accès aux événements en bord du Nil et les itinéraires piétons gérés. La configuration est illustrative et soumise à une confirmation d'ingénierie finale pour chaque site, géométrie d'itinéraire, environnement radio et modèle d'autorisation. Le problème opérationnel est la collecte de preuves pendant les patrouilles nocturnes. Une patrouille à pied peut arriver après qu'un trouble s'est déjà déplacé, tandis qu'une caméra conventionnelle peut enregistrer davantage de données brutes que l'équipe de commandement ne peut examiner à temps. Sky Hub modifie le flux de travail en traitant localement, sur le poteau, les flux caméra et environnementaux, afin de produire des métadonnées d'événements et d'état désidentifiées pour une vue de commandement avec image opérationnelle commune de la police. Le poteau est un pur poteau intelligent, et non un actif d'éclairage : il héberge détection, calcul, stockage sur batterie, recharge solaire, support autonome de drones et support de robots au sol, sans système d'éclairage. Pour le modèle d'événements temporaires du Caire, cette distinction compte, car le nœud peut être placé selon la couverture opérationnelle plutôt que d'être lié aux emplacements de services publics existants.
2. Question de revue : qu'est-ce qui a ralenti la collecte des preuves ?
Le scénario de revue commence par un événement en soirée très fréquenté près d'un itinéraire de tourisme culturel. Une petite brèche de périmètre, une compression de foule près d'une porte ou un mouvement autour d'une voie de service restreinte peut nécessiter une évaluation policière. La question liée à l'incident est pratique : comment l'équipe événementielle de la police peut-elle obtenir des preuves situationnelles exploitables assez rapidement pour choisir la bonne réponse ? Dans le déploiement proposé, le poteau Sky Hub effectue une perception locale pour le comptage anonyme des véhicules, la densité de foule, l'intrusion et la conscience périmétrique. La vidéo brute et les données capteurs brutes restent sur le poteau. La vue de commandement reçoit des métadonnées d'événements, l'état des dispositifs, des journaux de mission et des options de réponse approuvées par l'opérateur. Cela soutient une gestion orientée PDPL-LGPD, car le système est conçu autour du traitement local et de la minimisation des données, et non d'un téléversement brut continu. Le KPI est le temps de réponse, formulé comme une métrique d'évaluation cible plutôt que comme un résultat revendiqué. L'acheteur peut mesurer le temps entre le signalement d'événement par le poteau, l'évaluation par l'opérateur, la sortie de drone autorisée ou l'affectation d'un robot au sol, puis l'examen du dossier de preuves. Le cas ne revendique pas de taux de détection atteints, de quantités de déploiement en service ni de zones de couverture. Il définit plutôt le test opérationnel : lors d'un événement temporaire d'économie nocturne, le poteau aide-t-il la police à réduire les attentes évitables, supprimer les boucles de recherche manuelle inutiles et maintenir une piste probatoire plus claire ? La structure de revue d'incident soutient également la responsabilisation. Chaque action dispose d'un journal de mission, d'un état de batterie, d'une référence de file de tâches et d'un marqueur d'autorisation humaine, afin que le registre de réponse puisse être examiné après l'événement.
3. Configuration de nœud proposée autour de l'événement
Une implantation d'événement temporaire au Caire utiliserait Sky Hub comme micro-station hors réseau placée près des points de contrôle, des goulets piétons ou des abords d'accès de service. Chaque poteau porte environ 15 mètres carrés de film mince CIGS flexible enveloppant à 360 degrés sur un corps vertical d'environ 8 mètres de haut et 0,6 mètre de large, fournissant environ 2,4 à 2,7 kWp de puissance nominale. Comme un cylindre vertical collecte le soleil direct principalement sur sa projection orientée vers le soleil, le modèle de planification doit considérer le solaire comme une recharge, et non comme une autosuffisance illimitée. Dans une région à fort ensoleillement, la production réaliste par ciel clair est d'environ 0,8 à 1,1 kW DC en crête, atteignant généralement son maximum en milieu de matinée ou dans l'après-midi plutôt qu'à midi, avec environ 6 à 9 kWh par jour. La revue d'ingénierie au Caire doit valider l'ombre des bâtiments, les structures événementielles, la maintenance liée à la poussière et l'angle solaire saisonnier. Les tâches à forte puissance des drones et robots sont amorties par un stockage de classe 5 à 20 kWh et planifiées selon le cycle de service. Le module central est le système de remplacement à chaud des batteries de drones. Un drone posé revient au poteau, s'arrime pour un échange automatisé de batterie par service arrière, reçoit un pack chargé depuis le magasin multibaie, puis peut redécoller pour la tâche autorisée suivante. Plusieurs baies prennent en charge plusieurs créneaux de sorties consécutifs, utiles lorsque la patrouille nocturne nécessite des passages courts et répétés de collecte de preuves plutôt qu'un seul vol long. Le même poteau gère également la planification d'itinéraire, l'état de charge et d'échange, la file de tâches, l'état de santé de la flotte et les journaux de mission. Un robot humanoïde ou de service peut patrouiller au niveau du sol, répondre aux alarmes, inspecter les points d'accès, se coordonner avec la vue aérienne et revenir à la base du poteau pour une recharge sans fil. Cela crée un nœud de terrain qui soutient la revue policière sans nécessiter de réseau électrique, d'alimentation municipale ou d'alimentation du site au point d'installation.
4. Détecter, décider, agir, enregistrer
La boucle opérationnelle suit la détection, l'évaluation et la réponse autorisées, la planification par calcul en périphérie, puis les opérations de terrain et la maintenance dans une vue de commandement unique avec image opérationnelle commune. Lors d'un incident de patrouille nocturne, la caméra PTZ du poteau et le modèle de perception local signalent une anomalie pertinente, telle qu'un changement de densité de foule près d'une porte, une accumulation de véhicules près d'une voie restreinte ou une intrusion dans un périmètre temporaire. Le module périphérique planifie localement les charges de travail d'inférence et de support de mission, en conservant les flux bruts sur le poteau. L'opérateur de commandement reçoit une carte d'événement avec référence de localisation, horodatage, bande de confiance, contexte environnemental et options de réponse recommandées. Pour les opérations de drones, l'opérateur peut autoriser un itinéraire, un angle d'inspection et une tâche de preuve. Pour la réponse au sol, l'opérateur peut diriger le robot de service vers un point de contrôle défini, capturer l'état local et se coordonner avec la perspective aérienne. La coordination C-UAS reste non létale et soumise à autorisation humaine. Si un drone non autorisé est détecté et suivi par la détection du poteau ou par une entrée optionnelle de capteur partenaire, le nœud peut commander à son propre drone ami d'effectuer une capture aérienne souple par filet ou une dissuasion par approche rapprochée après autorisation. Le radar n'est pas intégré au poteau ; il ne peut être considéré que comme une entrée externe optionnelle lorsqu'un système partenaire est approuvé. Le dossier d'incident n'est pas un déversement de données brutes. Il s'agit d'un paquet structuré de métadonnées d'événements désidentifiées, de journaux de mission, d'état d'échange de batteries, de décisions d'opérateur, de synthèses capteurs et de références de preuves locales conservées conformément à la politique de rétention de l'événement. C'est ainsi que le poteau soutient la collecte de preuves : en transformant un incident nocturne évolutif en une chaîne examinable d'observations locales et d'actions autorisées.
5. Méthode d'évaluation pour les acheteurs policiers
Pour une partie prenante policière, l'évaluation la plus crédible n'est pas une fiche produit, mais un test post-action d'incident. Avant l'événement, l'acheteur définit les itinéraires de patrouille cibles, les zones temporairement restreintes, les catégories de preuves, les règles d'autorisation et la politique de rétention. Pendant l'événement, l'équipe de commandement mesure les étapes du temps de réponse sans revendiquer de performance généralisée : signalement d'événement vers revue par l'opérateur, revue vers tâche autorisée, tâche vers confirmation de terrain, et confirmation de terrain vers dossier d'incident. Le module d'échange de batteries doit être évalué selon la continuité de patrouille, et non selon une seule revendication d'endurance. La question pratique est de savoir si les créneaux de sorties consécutifs peuvent maintenir la disponibilité aérienne pendant les périodes de pointe de l'économie nocturne, tandis que le stockage et la recharge solaire sont gérés dans des cycles de service sûrs. La fonction de robot au sol doit être évaluée pour les tâches qui réduisent l'exposition manuelle ou les déplacements répétés : inspection de barrières temporaires, réponse aux alarmes non critiques et coordination aux entrées où une vue aérienne seule ne suffit pas. Le cas du Caire doit également inclure les limites opérationnelles. Les rues de la vieille ville peuvent introduire de l'occlusion, des problèmes de communication par trajets multiples et des contraintes de gestion de foule. Les zones patrimoniales peuvent exiger des règles de placement strictes. La météo, la poussière et les intervalles de nettoyage affectent le rendement solaire et les optiques. La confirmation d'ingénierie finale doit donc inclure des visites de site, une cartographie des autorisations, une revue de l'espace aérien, une revue de la gestion des données et une procédure écrite d'autorisation humaine pour toute réponse par drone ou C-UAS. Dans ces limites, la configuration Sky Hub proposée fournit à la police un nœud d'IA physique temporaire et hors réseau pour les patrouilles nocturnes axées sur la collecte de preuves et la discipline du temps de réponse.
Configuration du système
| Paramètre | Configuration |
|---|---|
| Format du poteau | SOLARTODO Sentinel Sky Hub, pur poteau intelligent sans éclairage pour les patrouilles d'événements temporaires de tourisme culturel |
| Système énergétique | Micro-station entièrement hors réseau avec batterie de secours, recharge CIGS flexible enveloppante à 360 degrés et stockage de classe 5 à 20 kWh |
| Base de planification solaire | Enveloppe CIGS d'environ 15 m2, puissance nominale d'environ 2,4 à 2,7 kWp, production réaliste par ciel clair à fort ensoleillement d'environ 0,8 à 1,1 kW DC en crête et 6 à 9 kWh par jour |
| Calcul IA en périphérie | Module périphérique de classe Jetson Orin ou Thor pour l'inférence sur poteau, la planification des charges de travail et le traitement local des événements |
| Caméra et détection | Caméra PTZ avec perception locale pour comptage anonyme des véhicules, densité de foule, intrusion et conscience périmétrique ; surveillance environnementale à neuf paramètres |
| Support de drones | Affectation autonome d'itinéraires, lancement, retour, journalisation de mission et remplacement à chaud multibaie des batteries par service arrière pour sorties autorisées consécutives |
| Coordination robot et C-UAS | Patrouille par robot de service au sol et recharge sans fil à la base du poteau ; coordination C-UAS non létale et autorisée par un humain au moyen de la détection, du suivi et d'une réponse par drone ami |
Comment ça marche
- La perception PTZ sur poteau signale un changement de densité de foule, une intrusion ou une anomalie de voie restreinte pendant la patrouille nocturne.
- L'IA en périphérie classe l'événement localement et n'envoie que des métadonnées d'état désidentifiées à la vue de commandement de la police.
- Un opérateur humain examine la carte d'événement, vérifie les options de mission et autorise la réponse par drone ou robot au sol.
- Le drone décolle ou redécolle après remplacement à chaud de la batterie, capture la vue d'inspection assignée et retourne au poteau.
- Le nœud enregistre les journaux de mission, l'état d'échange de batterie, les décisions de l'opérateur et les références de preuves locales pour la revue d'incident.
- Les équipes de terrain reçoivent un paquet de preuves concis et l'état de la réponse sans que la vidéo brute ne quitte le poteau par défaut.
Hypothèses de planification (indicatives)
Données de planification illustratives que l’acheteur peut recalculer : indicateurs cibles, pas des résultats obtenus. Sous réserve de confirmation finale d’ingénierie.
| Indicateur | Hypothèse de planification | Valeur indicative |
|---|---|---|
| Évaluation du temps de réponse | L'acheteur mesure le flux de travail cible depuis le signalement d'événement par le poteau jusqu'à l'action de terrain autorisée par l'opérateur pendant la patrouille de l'économie nocturne | 4 étapes de revue suivies par incident |
| Continuité de patrouille | Le remplacement à chaud des batteries prend en charge des sorties courtes et répétées de collecte de preuves pendant les fenêtres de pointe de l'événement, sans dépendre d'un seul vol long | 3 à 5 créneaux de sorties consécutifs planifiés par nœud |
| Réduction des recherches manuelles | Les tâches aériennes et de robot au sol remplacent les vérifications manuelles répétées des portes temporaires, voies de service et abords de périmètre | 10 à 20 vérifications de routine automatisées par nuit d'événement |
| Qualité du dossier de preuves | La revue d'incident utilise des métadonnées d'événements locales, des journaux de mission, des synthèses capteurs et des registres d'autorisation opérateur au lieu d'un transfert large de flux bruts | 1 paquet structuré par incident revu |
| Planification du cycle de service énergétique | Les tâches à forte puissance sont planifiées selon l'état de la batterie, la fenêtre de recharge solaire et la priorité de mission | Enveloppe de stockage de classe 5 à 20 kWh par nœud |
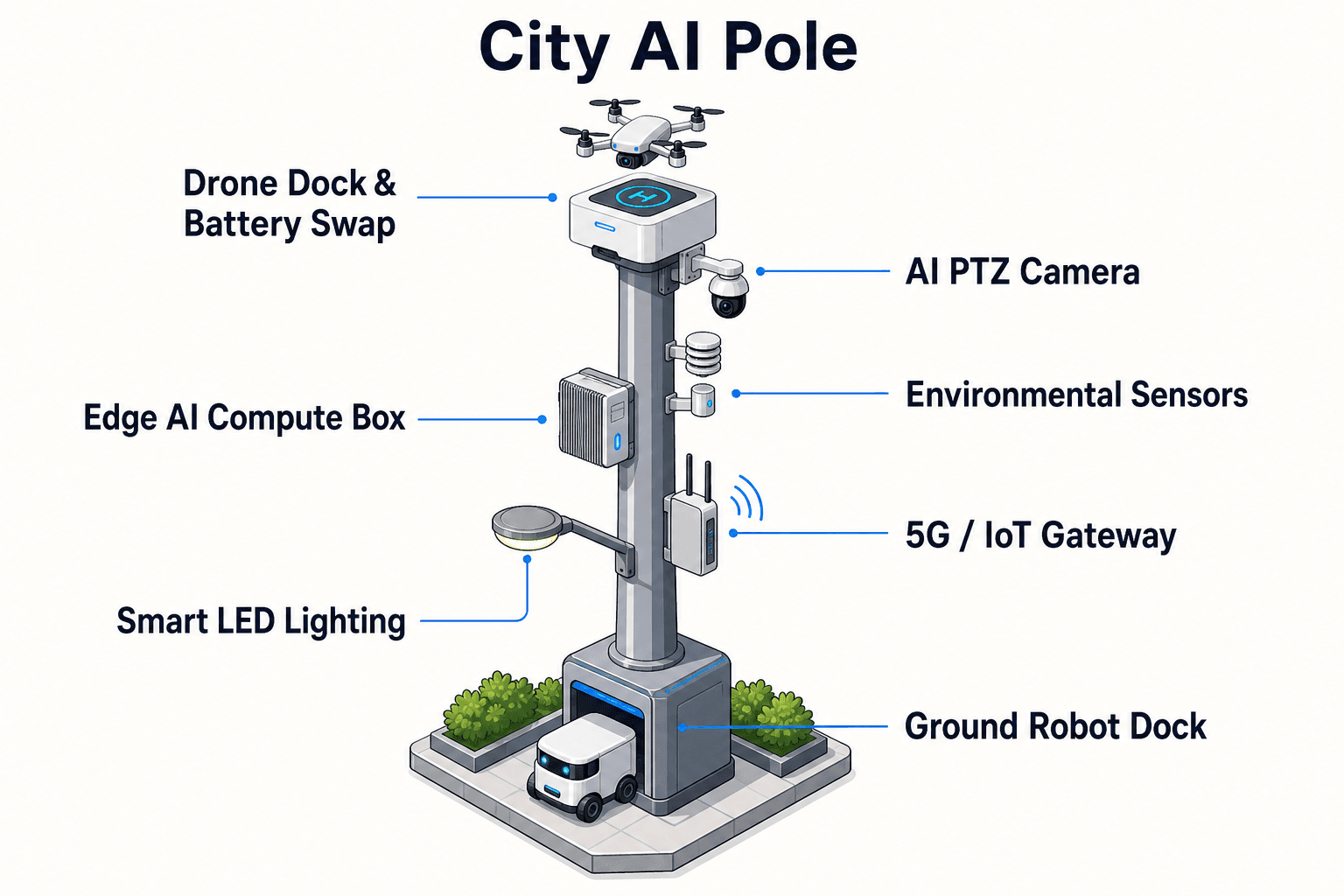
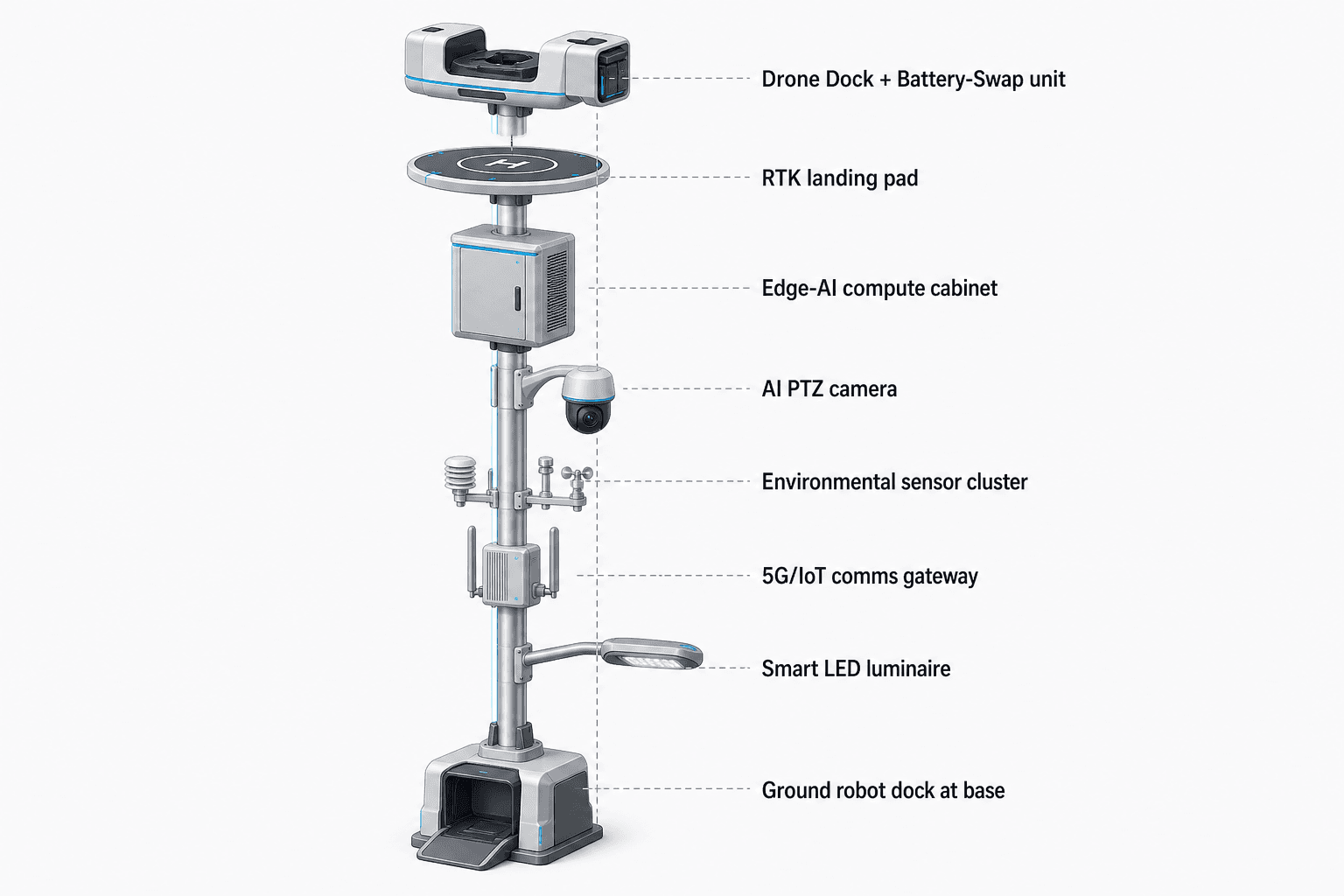
Équipements déployés
- Corps de poteau SOLARTODO Sentinel Sky Hub avec armoire de batteries hors réseau intégrée
- Couche de recharge solaire en film mince CIGS flexible enveloppante à 360 degrés
- Caméra PTZ avec fonctions de perception locale
- Suite de capteurs environnementaux à neuf paramètres
- Module de calcul périphérique sur poteau de classe Jetson
- Module d'arrimage autonome de drone et de remplacement à chaud multibaie des batteries
- Base de recharge sans fil pour robot de service au sol
- Logiciel de commandement avec image opérationnelle commune pour les opérations événementielles de la police
Questions fréquentes
Ce déploiement proposé au Caire est-il une mise à niveau de l'éclairage ?
Non. SOLARTODO Sentinel Sky Hub est un pur poteau intelligent et un nœud périphérique d'IA physique sans système d'éclairage. La configuration proposée au Caire est positionnée pour la patrouille policière de l'économie nocturne, la collecte de preuves, les opérations de drones, le support robotique, la surveillance environnementale et le traitement en périphérie. Elle doit être planifiée comme un nœud opérationnel, et non comme un actif d'éclairage.
Comment le module de remplacement à chaud des batteries aide-t-il la collecte de preuves par la police ?
La patrouille nocturne exige souvent des contrôles aériens courts et répétés, en particulier lorsqu'une foule se déplace entre portes, ruelles et barrières temporaires. Le magasin de batteries multibaie permet à un drone revenu de recevoir un pack chargé par un échange automatisé par service arrière, puis de redécoller pour une autre sortie autorisée. Cela soutient la continuité de la collecte de preuves sans considérer un seul vol comme toute la mission.
Quelles données quittent le poteau pendant le flux d'incident ?
La posture de données visée privilégie d'abord le traitement local. La vidéo brute et les données capteurs brutes restent sur le poteau pour l'inférence locale et le traitement des preuves selon la politique de l'événement. La vue de commandement reçoit des métadonnées d'événements désidentifiées, l'état des dispositifs, les journaux de mission et les registres de décision de l'opérateur. Il s'agit d'un langage de conception orienté PDPL-LGPD, et non d'une revendication de certification.
Le poteau peut-il identifier des visages ou lire des plaques d'immatriculation ?
Aucune capacité active déployée n'est revendiquée pour la reconnaissance faciale ou la reconnaissance de plaques d'immatriculation dans cette étude de cas. Le périmètre de détection de sécurité couvre le comptage anonyme des véhicules, la densité de foule, l'intrusion et la conscience périmétrique. Ce périmètre est mieux aligné avec le triage des preuves d'événements temporaires, le traitement local et les règles de déploiement orientées confidentialité pour les zones de tourisme culturel.
Le système dépend-il de l'alimentation électrique municipale sur le lieu de l'événement ?
Non. Le nœud proposé est conçu comme une micro-station entièrement hors réseau avec batterie de secours et recharge solaire CIGS sur poteau. Le solaire est traité de façon réaliste comme une couche de recharge supplémentaire, et non comme une autosuffisance illimitée. Les tâches de drones et de robots sont amorties par le stockage et planifiées selon le cycle de service après confirmation d'ingénierie spécifique au site.
Comment la lutte anti-UAS est-elle gérée dans un scénario d'événement policier ?
La coordination C-UAS est uniquement non létale et autorisée par un humain. Le poteau peut détecter et suivre un drone non autorisé via ses propres capteurs ou une entrée optionnelle approuvée de capteur partenaire, puis commander à un drone ami une capture aérienne souple par filet ou une dissuasion par approche rapprochée après autorisation. Le cas exclut les destructions en vol, le brouillage, les méthodes de déni et les attaques autonomes.
Pour aller plus loin
- Gamme de mâts City AI / éclairage public intelligent
- Plus de cas de déploiement de ville intelligente
- Parlez à notre équipe d’ingénierie
Vous planifiez un déploiement d’IA physique similaire pour rues, campus ou espaces publics ? Demander une consultation d’ingénierie