
Un poteau d’IA urbaine, en l’occurrence SOLARTODO Sentinel Sky Hub, est un nœud urbain Physical-AI en périphérie entièrement hors réseau : un poteau intelligent non dédié à l’éclairage, avec stockage par batterie, recharge solaire CIGS enveloppante à 360°, calcul en périphérie, capteurs, opérations de drones et support de robot au sol. Cette configuration pour Kuala Lumpur prend en charge la réponse nocturne aux incidents de trafic sur un corridor portuaire avec traitement local et actions terrain autorisées par un humain.
Contexte de l’incident : pression de la saison des inondations sur le corridor portuaire de Kuala Lumpur
Pendant la saison des inondations, les équipes de gestion des urgences à Kuala Lumpur font face à un schéma familier : l’intensité de la pluie augmente après la tombée de la nuit, les accotements deviennent moins fiables, la visibilité baisse, et de petits incidents sur les corridors de fret peuvent se transformer en événements impliquant plusieurs organismes. La ville elle-même est située à l’intérieur des terres, mais la grande vallée de Klang dépend des déplacements routiers entre les quartiers logistiques de Kuala Lumpur, les zones industrielles et la porte d’entrée de Port Klang. Lorsqu’un poids lourd immobilisé, une collision mineure, des débris tombés ou une obstruction par les eaux de crue apparaît la nuit, le premier problème n’est pas toujours l’événement lui-même. Le premier problème est la disponibilité : savoir si une image terrain vérifiée, un actif de réponse déployé et un point de communication durable sont disponibles sans attendre qu’une équipe atteigne l’emplacement exact.
Cette étude de cas présente un déploiement de corridor proposé et illustratif de SOLARTODO Sentinel Sky Hub pour une partie prenante de la gestion des urgences à Kuala Lumpur. L’archétype du corridor est lié au port plutôt qu’axé sur les services du centre-ville : les nœuds sélectionnés seraient placés aux points de pincement du trafic, aux approches sujettes aux inondations, aux entrées logistiques, aux routes périmétriques et aux zones de rassemblement où les équipes d’intervention ont besoin de visibilité, de calcul et d’action robotisée après les heures ouvrées. L’objectif n’est pas de remplacer les services d’urgence ni les autorités de contrôle du trafic. Il s’agit de fournir une couche Physical-AI persistante en périphérie, capable de détecter une condition de trafic anormale, d’appuyer l’évaluation humaine, de déployer un robot au sol ou un drone ami, et d’enregistrer le dossier de revue d’incident depuis le nœud lui-même.
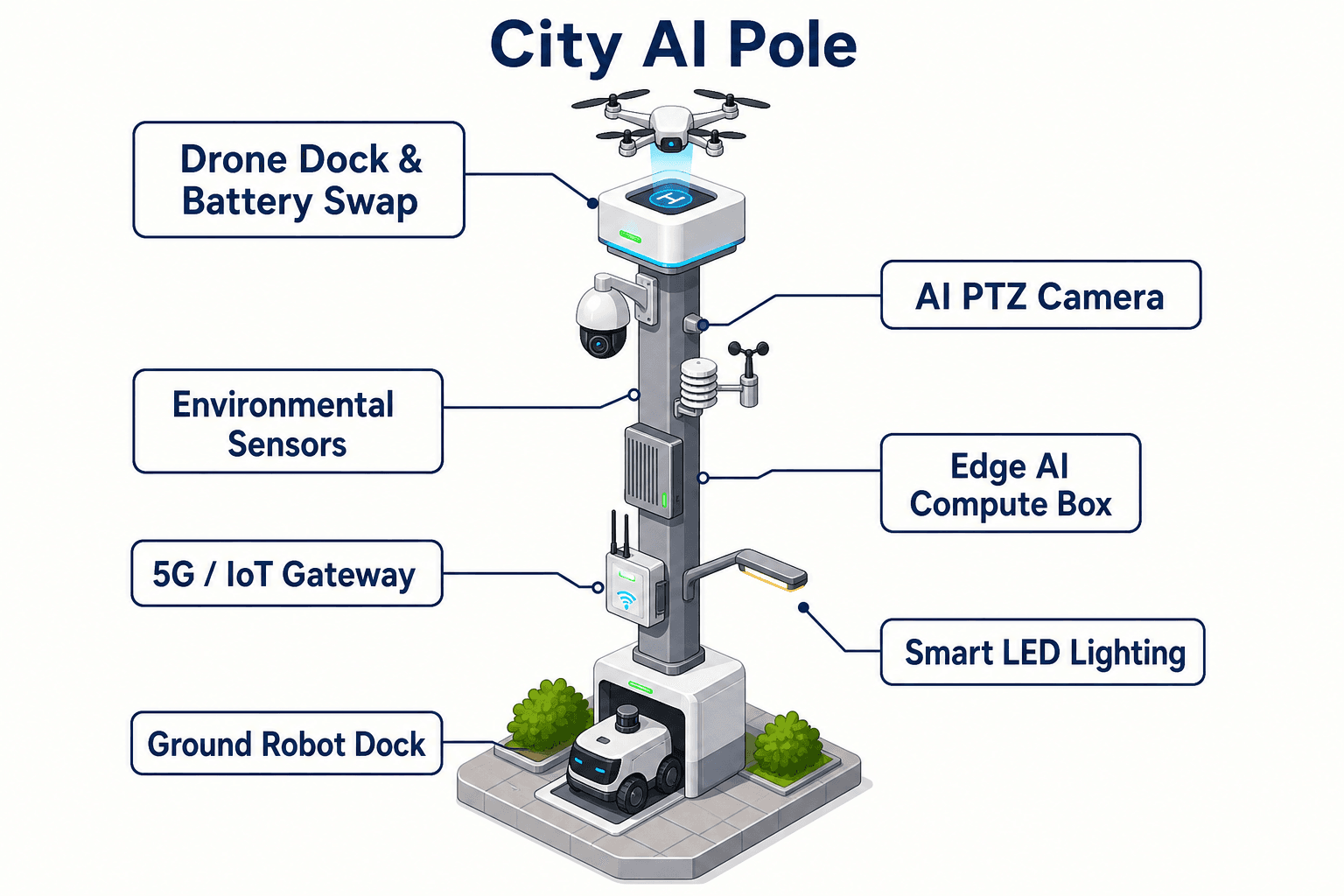
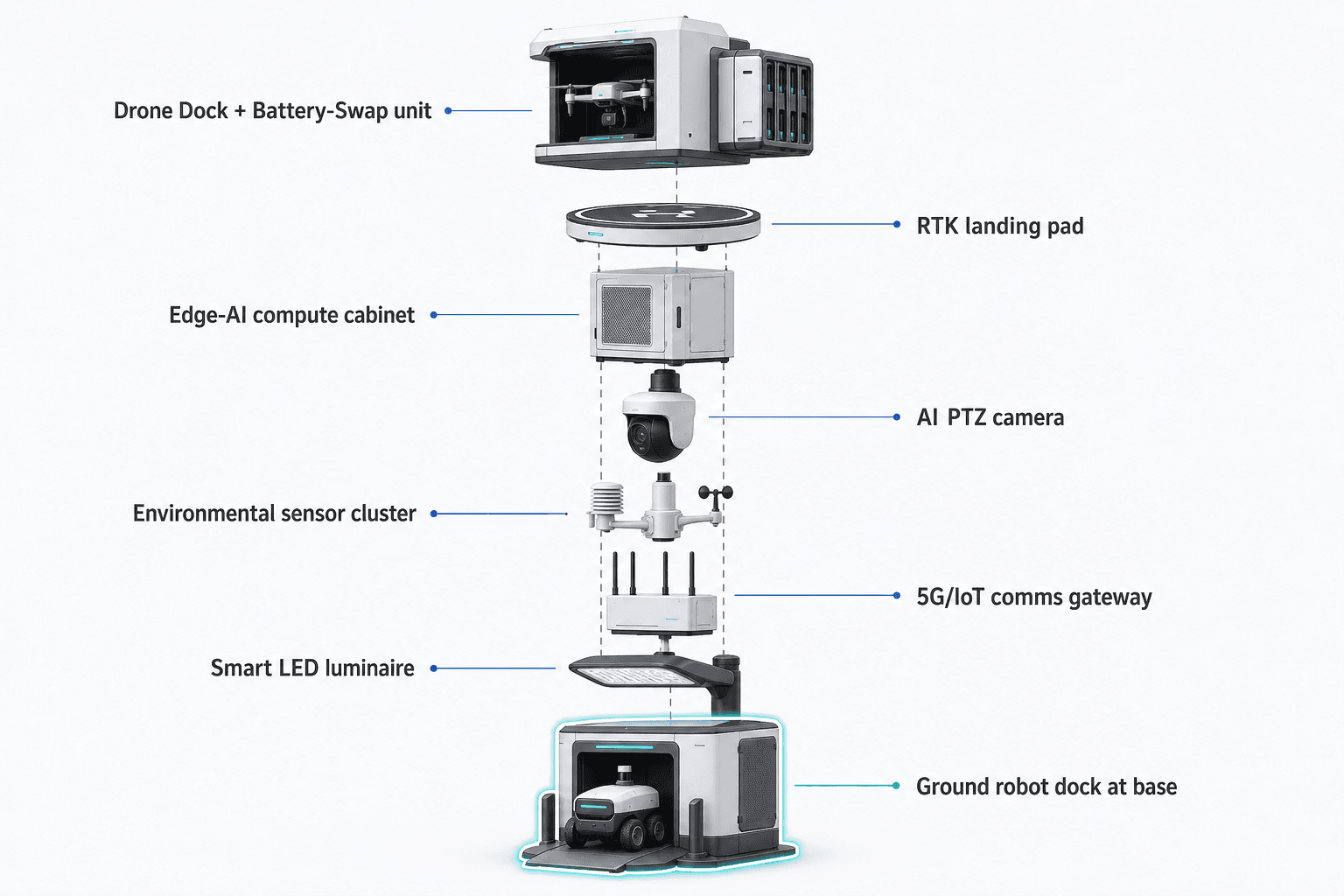
Sky Hub est positionné ici comme un poteau intelligent PURE, et non comme un actif d’éclairage. Il ne possède aucun système d’éclairage. Le poteau fonctionne comme une micro-station hors réseau avec stockage par batterie, recharge par film mince CIGS flexible enveloppant à 360°, inférence sur poteau, détection environnementale, détection de sécurité PTZ, opérations autonomes de drones, remplacement à chaud de batterie de drone, recharge de robot au sol et vue de commandement en image opérationnelle commune. Dans un corridor en saison des inondations, la question de conception est directe : chaque nœud peut-il rester disponible pendant les fenêtres de réponse nocturnes lorsque les équipes, les véhicules et l’accès à l’énergie sont contraints ? Le cadrage KPI proposé se concentre donc sur la disponibilité cible, la continuité des sorties, la disponibilité opérationnelle du robot, l’exhaustivité de la revue d’incident et le pourcentage d’événements pour lesquels seules des métadonnées dé-identifiées doivent quitter le poteau.
Revue du flux de travail des incidents de trafic
Le scénario de revue d’incident commence par une anomalie de trafic nocturne sur une route d’approche portuaire. Un véhicule s’arrête dans une position dangereuse après de fortes pluies, le trafic environnant commence à se comprimer, et la profondeur de l’eau près de l’accotement devient incertaine. Une réponse conventionnelle peut dépendre d’un appel d’usager de la route, du passage d’un véhicule de patrouille sur les lieux ou de flux de caméras fixes qui peuvent ne pas fournir de contexte environnemental local. Dans la configuration de corridor Sky Hub, le nœud le plus proche exécute en continu une perception locale sur le flux de sa caméra PTZ et sur ses instruments environnementaux. Il peut identifier des changements anonymes de comptage de véhicules, une accumulation de congestion, une intrusion dans une zone d’accotement restreinte, la densité de foule autour d’un véhicule arrêté et des mouvements périmétriques près d’une clôture logistique. Il n’exige pas le téléversement de vidéo brute pour l’évaluation normale des événements.
Une fois l’anomalie évaluée par le module en périphérie sur le poteau, l’incident entre dans la vue d’image opérationnelle commune utilisée par les opérateurs de gestion des urgences. Le système prend en charge la boucle opérationnelle décrite comme détection, évaluation et réponse autorisées, planification du calcul en périphérie, et opérations terrain et maintenance. C’est important pour les opérations de saison des inondations à Kuala Lumpur, car la décision est rarement binaire. L’opérateur peut devoir déterminer si la scène n’est qu’une panne, une collision nécessitant un déploiement, un blocage par les eaux de crue, une intrusion de sécurité près du corridor, ou un événement mixte nécessitant une coordination entre trafic, secours, sécurité portuaire et maintenance.
Le flux de travail centré sur le robot passe ensuite de l’observation à l’action terrain. Un robot humanoïde ou de service stationné à la base du poteau peut être libéré pour une patrouille autonome, une inspection rapprochée, une réponse à une alarme et une coordination air-sol. Il peut approcher la scène, inspecter autour des barrières, vérifier si des personnes sont présentes près du véhicule arrêté, évaluer le mouvement visible de l’eau et retourner à la base pour une recharge sans fil. Le drone ami peut décoller pour une inspection élevée du corridor, une observation du trafic en amont ou une reconnaissance des eaux de crue. Le module clé est le remplacement de batterie : lorsque le drone revient, un magasin multi-baies à service arrière effectue l’échange automatisé du pack épuisé contre un pack chargé, permettant des sorties consécutives sous réserve de l’autorisation de l’opérateur, des limites météorologiques et de la planification du cycle de service.
Cela compte surtout la nuit. Un seul vol de drone peut vérifier un incident, mais c’est la disponibilité répétée qui modifie le flux de travail de gestion des urgences. Si la première sortie confirme un véhicule arrêté, la deuxième peut vérifier la file en amont, la troisième peut valider un point de déviation, et une sortie ultérieure peut confirmer que le dégagement est terminé. Comme le nœud planifie localement l’énergie, le calcul et les actifs terrain, il peut donner la priorité aux tâches d’incident par rapport aux patrouilles de routine et préserver suffisamment de réserve pour le retour du robot, l’état de santé du système, les communications et la constitution du dossier de preuve.
Conception du nœud hors réseau et planification de la disponibilité
Le nœud Sky Hub proposé est conçu comme une station entièrement hors réseau : il utilise un stockage par batterie avec recharge solaire sur poteau et ne dépend pas du réseau électrique, de la ville ou de l’alimentation du site. Le corps du poteau porte environ 15 m² de film mince CIGS flexible enveloppant à 360° sur une forme cylindrique verticale d’environ 8 m de haut et à peu près 0,6 m de large. La plage nominale est d’environ 2,4 à 2,7 kWp, mais l’hypothèse d’ingénierie pratique est plus conservatrice. Un cylindre vertical capte le soleil direct sur la projection orientée vers le soleil, et non sur l’ensemble de l’enveloppe en une seule fois. Dans les régions à fort ensoleillement et ciel dégagé, la sortie réaliste est d’environ 0,8 à 1,1 kW DC en pic, culminant généralement en milieu de matinée ou en milieu d’après-midi plutôt qu’à midi, avec environ 6 à 9 kWh par jour.
Les conditions tropicales de Kuala Lumpur exigent une approche de planification encore plus disciplinée, car les précipitations, l’humidité, la couverture nuageuse et la météo de saison des inondations peuvent réduire la recharge. La couche CIGS doit donc être considérée comme une recharge supplémentaire pour une micro-station appuyée par batterie, et non comme une promesse d’exploitation solaire seule illimitée. La conception utilise un stockage de classe 5 à 20 kWh, sélectionné après ingénierie du site, fréquence des missions et modélisation des heures de réserve. Les tâches de drone et de robot sont amorties par le stockage et planifiées par cycle de service, avec une vue de commandement affichant l’état de la batterie, l’état du magasin d’échange, l’état de charge du robot, la charge de calcul et la priorité de la file de missions.
Pour un acheteur de gestion des urgences, la disponibilité n’est pas un slogan ; c’est une métrique de planification. Le modèle de planification cible doit définir combien de nœuds doivent être prêts pendant les nuits de saison des inondations, combien de sorties de drone consécutives sont nécessaires avant un service manuel, à quelle fréquence un robot doit pouvoir partir et revenir, et quelle réserve doit rester après un incident de trafic prioritaire. Le magasin de remplacement de batterie améliore la disponibilité parce qu’il dissocie la continuité de mission du drone de la recharge lente d’un pack unique. Plusieurs baies chargées permettent plusieurs sorties consécutives pendant que le nœud gère les cycles de recharge, les limites thermiques et la réserve restante.
La même logique de disponibilité s’applique à la gestion des données. Les flux vidéo bruts et les flux de capteurs restent sur le poteau pour le traitement local. Seules des métadonnées d’événement et d’état dé-identifiées peuvent quitter le nœud pour la vue de commandement, les rapports ou l’intégration avec les systèmes de gestion des urgences. Cette approche orientée PDPL/LGPD réduit la dépendance à la bande passante par mauvais temps et soutient une planification privacy-by-design, tout en restant soumise à une confirmation juridique, cybersécurité et ingénierie finale pour le déploiement malaisien spécifique.
Réponse menée par robot avec support de remplacement de batterie de drone
La valeur opérationnelle différenciée de cette conception de corridor pour Kuala Lumpur réside dans la combinaison de la réponse par robot au sol et de la continuité du remplacement de batterie de drone. Le robot au sol est l’intervenant de proximité : il peut quitter la base du poteau, inspecter le bord immédiat de la route, approcher un véhicule arrêté à une distance contrôlée, vérifier une entrée de drainage ou une barrière, et fournir à l’opérateur un état local sans envoyer un intervenant humain dans une mauvaise visibilité comme première étape. Il peut se coordonner avec le drone ami au-dessus, en utilisant le contexte aérien pour choisir un itinéraire plus sûr ou confirmer si la zone d’incident s’étend.
Le drone est l’éclaireur régional rapide. Il peut décoller depuis le nœud, patrouiller le segment de corridor, inspecter le trafic en amont et en aval, revenir pour un échange de batterie et redécoller pour des tâches de suivi. Le processus de remplacement à chaud est automatisé et à service arrière : après l’atterrissage, le magasin multi-baies échange la batterie épuisée contre un pack chargé. Cela soutient une revue répétée des incidents en saison des inondations sans opérateur sur site, sous réserve de l’autorisation de mission et des contraintes météorologiques. La valeur n’est pas seulement un temps de vol plus long ; c’est une interruption opérationnelle plus courte entre les cycles d’évaluation.
La coordination Counter-UAS est incluse comme fonction de sécurité contrôlée pour les zones d’infrastructures critiques proches des installations logistiques et liées au port. Le poteau peut détecter et suivre un drone non autorisé à l’aide de ses propres capteurs et d’entrées optionnelles de capteurs partenaires, y compris le radar uniquement lorsqu’il est fourni en externe par un système partenaire approuvé. Le poteau peut ensuite commander son propre drone ami pour une réponse non cinétique autorisée par un humain, comme une capture aérienne douce par filet ou une dissuasion par approche rapprochée. Cela est présenté comme une coordination sous contrôle opérateur, et non comme une escalade automatique.
La surveillance environnementale du nœud soutient également les décisions du robot et du drone. La vitesse du vent, la direction du vent, la température, l’humidité, la pression atmosphérique, le bruit, les PM10, les PM2.5 et l’éclairement contribuent au filtrage des missions et au contexte d’incident. Si le vent ou la pluie rendent une sortie de drone inadaptée, le robot peut rester l’actif terrain principal. Si l’eau de surface ou les débris rendent le déplacement du robot dangereux, le drone peut d’abord fournir une inspection aérienne. Ce modèle air-sol flexible explique pourquoi le système est mieux évalué comme un nœud Physical-AI en périphérie que comme un capteur conventionnel monté sur poteau.
Modèle d’évaluation pour les acheteurs de gestion des urgences
Le déploiement proposé doit être évalué au moyen d’une méthode de revue d’incident plutôt que comme un essai technologique générique. Chaque emplacement de corridor sélectionné doit être évalué selon sa pertinence en saison des inondations, la distance de réponse, les options de communication, la sécurité physique, l’exposition solaire, la sécurité du mouvement du robot, le dégagement de lancement du drone, l’accès de maintenance et l’intégration au flux de commandement de la partie prenante. L’acheteur doit définir des seuils cibles avant le déploiement : cible de disponibilité du nœud, énergie de réserve minimale, nombre de sorties de drone par fenêtre de réponse nocturne, pourcentage de disponibilité opérationnelle du robot, exhaustivité du dossier événement-revue, et délai acceptable entre le signalement d’anomalie et la décision humaine.
Aucune quantité de déploiement à l’échelle nationale, zone de couverture ou performance atteinte n’est affirmée ici. Un programme crédible à Kuala Lumpur commencerait par cartographier les segments de corridor prioritaires, sélectionner des positions de nœuds représentatives et valider le modèle opérationnel selon les exigences locales de météo, d’espace aérien, de sécurité routière et de gouvernance des données. La confirmation d’ingénierie déterminerait la taille finale du stockage, les hypothèses de rendement solaire, la conception des fondations, le chemin de communication, l’enveloppe d’itinéraire robotique et le nombre de baies de magasin de batteries nécessaires pour le cycle de service cible.
Le dossier de revue d’incident est la sortie de gestion. Pour chaque événement de trafic, le nœud peut préserver les preuves locales, générer des métadonnées dé-identifiées, journaliser les décisions de l’opérateur, enregistrer l’affectation des tâches du drone et du robot, afficher les transitions d’état du remplacement de batterie, documenter les conditions environnementales et résumer les actions terrain effectuées. Les équipes de gestion des urgences peuvent utiliser ces dossiers pour vérifier si les objectifs de disponibilité ont été atteints, si les actifs de réponse ont été attribués correctement, et si la couverture du corridor doit être ajustée avant la prochaine fenêtre de saison des inondations.
Pour un corridor de Kuala Lumpur lié au port, le bénéfice stratégique est la continuité opérationnelle en périphérie. Le nœud donne aux gestionnaires des urgences un point local et hors réseau de détection, de calcul, d’action air-sol et de revue. Il le fait sans revendiquer une autonomie solaire illimitée, sans envoyer par défaut la vidéo brute hors du poteau comme modèle opérationnel, sans dépendre de plateformes tierces nommées et sans se positionner comme un produit d’éclairage. La question pratique pour l’acheteur devient mesurable : quels incidents de corridor exigent une disponibilité nocturne persistante, et combien de nœuds Sky Hub sont nécessaires pour maintenir la réponse par robot et drone prête lorsque les conditions de saison des inondations rendent la première vérification la plus difficile ?
Configuration du système
| Paramètre | Configuration |
|---|---|
| Forme du poteau | Poteau intelligent PURE SOLARTODO Sentinel Sky Hub, corps cylindrique de nœud en périphérie non dédié à l’éclairage, d’environ 8 m de haut avec enveloppe CIGS à 360° |
| Système énergétique | Micro-station entièrement hors réseau appuyée par batterie, avec stockage de classe 5-20 kWh et recharge solaire CIGS supplémentaire, sous réserve de l’ingénierie du site |
| Remplacement de batterie de drone | Magasin de batteries automatisé multi-baies à service arrière pour l’échange de packs chargés et des sorties autorisées consécutives |
| Support de robot au sol | Zone de recharge sans fil côté base pour patrouille, inspection, réponse à une alarme et retour en charge d’un robot humanoïde ou de service |
| Calcul IA en périphérie | Module d’inférence sur poteau de classe Jetson Orin ou Thor pour les charges de travail locales de vidéo, capteurs et planification de mission |
| Ensemble de capteurs | Perception IA PTZ plus vitesse du vent, direction du vent, température, humidité, pression, bruit, PM10, PM2.5 et éclairement |
| Vue de commandement | Tableau de bord d’image opérationnelle commune pour revue des anomalies, mise en file des tâches, journaux de mission, santé de la flotte, état des batteries et autorisation humaine |
Comment ça marche
- La perception PTZ sur poteau signale une anomalie de trafic nocturne, une accumulation de file ou une intrusion en zone restreinte près du corridor portuaire.
- L’IA en périphérie évalue l’événement localement et le combine avec les relevés météorologiques, de qualité de l’air, de bruit et d’éclairement.
- La vue d’image opérationnelle commune présente l’événement à un opérateur de gestion des urgences pour autorisation humaine.
- Le nœud déploie un robot au sol et, si les conditions le permettent, lance un drone ami pour l’inspection du corridor.
- Le drone revient pour un remplacement à chaud automatisé de la batterie et peut être redéployé pour des vues de suivi tandis que le robot retourne à la recharge sans fil.
- Le nœud enregistre les journaux de mission, les transitions d’état des batteries, les décisions de l’opérateur et les métadonnées d’incident dé-identifiées pour revue.
Hypothèses de planification (indicatives)
Données de planification illustratives que l’acheteur peut recalculer : indicateurs cibles, pas des résultats obtenus. Sous réserve de confirmation finale d’ingénierie.
| Indicateur | Hypothèse de planification | Valeur indicative |
|---|---|---|
| Disponibilité de réponse nocturne | Part cible des nuits de corridor sélectionnées pendant lesquelles chaque nœud reste prêt pour la détection d’incident, le déploiement du robot et au moins une sortie de drone | Cible de planification ~95 % |
| Continuité des sorties de drone | Le magasin de remplacement de batterie prend en charge des cycles d’inspection répétés en saison des inondations avant service manuel, sous réserve des limites météorologiques et de réserve | ~3-5 sorties autorisées consécutives par fenêtre d’événement |
| Inspection terrain par robot | Le robot au sol effectue l’inspection de premier regard pour certaines anomalies de trafic à risque faible à moyen avant qu’une équipe humaine n’entre sur la scène | ~2-4 tâches d’inspection automatisées par fenêtre nocturne |
| Déplacement des patrouilles manuelles | Les contrôles nocturnes de routine du corridor passent de la patrouille en véhicule à des patrouilles planifiées par drone et robot lorsque la réglementation et les règles de sécurité le permettent | ~6-10 contrôles de patrouille automatisés par semaine |
| Exhaustivité de la revue d’incident | Chaque événement signalé produit un dossier de journal local avec métadonnées dé-identifiées, historique des tâches, contexte environnemental et décisions de l’opérateur | Cible d’exhaustivité du dossier ~90 % |
Équipements déployés
- Nœud en périphérie Physical-AI au format poteau SOLARTODO Sentinel Sky Hub
- Armoire d’alimentation hors réseau appuyée par batterie avec recharge CIGS flexible enveloppante à 360°
- Caméra IA PTZ et pile de perception locale
- Ensemble de surveillance environnementale à neuf paramètres
- Baie de drone autonome avec magasin multi-baies de remplacement à chaud de batterie
- Base de recharge sans fil pour robot humanoïde ou de service
- Module de calcul en périphérie sur poteau de classe Jetson
- Logiciel de commandement en image opérationnelle commune pour opérations autorisées
Questions fréquentes
Cette étude de cas sur Kuala Lumpur revendique-t-elle un déploiement gouvernemental actif ?
Non. Il s’agit d’une configuration proposée et illustrative pour un acheteur de gestion des urgences évaluant la réponse sur corridor lié au port dans le contexte de Kuala Lumpur et de la vallée de Klang. Elle ne revendique pas de client spécifique, de nombre de nœuds, de zone de couverture, de temps de réponse atteint ni de résultat certifié. Le périmètre de déploiement final nécessiterait une confirmation d’ingénierie, juridique, d’espace aérien, de sécurité et d’achat.
Pourquoi la disponibilité est-elle le principal KPI pour ce cas d’usage de corridor ?
Les incidents nocturnes en saison des inondations sont difficiles parce que la première image terrain vérifiée peut arriver tard, surtout lorsque la pluie, la congestion et les conditions routières ralentissent la réponse manuelle. La disponibilité mesure si le nœud peut maintenir en ligne la détection, le calcul, les sorties de drone, la disponibilité du robot, les communications et la journalisation des preuves pendant la fenêtre de réponse. C’est un meilleur KPI de planification qu’une durée de vol unique ou une spécification de caméra.
Comment le remplacement à chaud de batterie de drone améliore-t-il la réponse d’urgence ?
Le magasin de remplacement de batterie réduit l’interruption entre les inspections aériennes. Un drone posé peut recevoir un pack chargé via un échange automatisé à service arrière puis être redéployé pour une autre tâche autorisée. Pour un incident de trafic, cela peut signifier une sortie pour vérifier l’événement, une autre pour inspecter la file en amont et une sortie ultérieure pour confirmer le rétablissement, le tout régi par la réserve d’énergie et les limites météorologiques.
Quel rôle joue le robot au sol par rapport au drone ?
Le robot est l’actif d’inspection de proximité. Il peut patrouiller près du poteau, approcher une zone de véhicule arrêté à une distance contrôlée, inspecter des débris, observer l’eau au niveau de la route et retourner à la recharge sans fil. Le drone fournit un contexte aérien plus large. Ensemble, ils soutiennent la coordination air-sol, l’opérateur choisissant l’actif le plus sûr selon le type d’incident, la météo et les conditions d’itinéraire.
La vidéo brute quitte-t-elle le poteau pour traitement ?
Le modèle opérationnel prévu conserve la vidéo brute et les données de capteurs sur le poteau pour le traitement local en périphérie. La vue de commandement peut recevoir des métadonnées d’événement et d’état dé-identifiées, comme le type d’anomalie, l’état des actifs, les relevés environnementaux et les journaux de mission. Il s’agit d’une approche de conception orientée PDPL/LGPD, et non d’une déclaration de certification juridique achevée ou de conformité automatique pour chaque site.
Le Sky Hub est-il alimenté uniquement par l’énergie solaire ?
Le système est entièrement hors réseau, mais cela ne signifie pas une exploitation solaire seule illimitée. L’enveloppe CIGS à 360° est une couche de recharge supplémentaire pour une micro-station appuyée par batterie. La sortie pratique dépend de l’angle solaire, de la météo et de l’exposition du site ; les missions de drone et de robot sont donc amorties par un stockage de classe 5-20 kWh et planifiées par cycle de service.
Comment l’activité de drones non autorisés est-elle gérée près des infrastructures critiques ?
Le nœud peut prendre en charge la détection, le suivi et la coordination de commandement pour les événements de drones non autorisés, avec une autorisation humaine requise pour l’atténuation. Son drone ami peut être affecté à une capture aérienne douce par filet ou à une dissuasion par approche rapprochée lorsque cela est permis. Le radar n’est pas intégré au poteau ; il ne peut être envisagé que comme une entrée optionnelle de capteur partenaire dans une conception spécifique au site.
Pour aller plus loin
- Gamme de mâts City AI / éclairage public intelligent
- Plus de cas de déploiement de ville intelligente
- Parlez à notre équipe d’ingénierie
Vous planifiez un déploiement d’IA physique similaire pour rues, campus ou espaces publics ? Demander une consultation d’ingénierie