
Dans ce scénario lisboète, un City AI Pole est un nœud edge physical-AI SOLARTODO Sentinel : un poteau intelligent intégré combinant détection sur poteau, inférence edge-AI embarquée, workflows de communications résilientes, station d’accueil pour drone et robot de patrouille amarré à la base. Le déploiement proposé soutient la surveillance de frontière assurée par la gestion urbaine autour du périmètre d’un campus dans le CBD pendant une tension réseau liée à la canicule.
Mission dans le CBD de Lisbonne et besoin interservices
Ce déploiement illustratif à Lisbonne est cadré autour d’une mission de gestion urbaine, et non d’un achat produit : maintenir une surveillance fiable du périmètre d’un campus municipal dans le CBD lorsqu’une canicule accroît la pression opérationnelle et qu’une coupure réseau limite la télésurveillance habituelle. L’environnement cible est un quartier central dense, par exemple un campus de services municipaux, une cour d’exploitation mobilité, un périmètre administratif, une interface d’espace public en front d’eau ou un actif municipal mixte proche de rues à forte fréquentation. Dans ce contexte, la surveillance de frontière signifie surveiller la limite d’un site géré par la ville : portails, clôtures, entrées de service, voies de livraison, abords de stationnement et points de périmètre exposés au public.
La partie prenante n’est pas une seule équipe de sécurité. Un déploiement exploitable serait interservices par conception. La gestion urbaine porte l’objectif de service et la discipline budgétaire. La sécurité municipale définit les règles d’escalade. Les équipes facilities gèrent l’alimentation, l’emplacement des poteaux, l’accès à la base et les fenêtres de maintenance. Les équipes IT et communications définissent le comportement du réseau en cas de perte partielle ou totale du backhaul. Les équipes mobilité et espace public examinent comment les itinéraires de patrouille du robot évitent les piétons, rampes, bordures, pistes cyclables et affluences nocturnes. Les responsables juridiques et protection des données définissent ce qui est enregistré, conservé, masqué ou escaladé.
Le déclencheur saisonnier est une canicule. À Lisbonne, les périodes de fortes températures peuvent prolonger les activités extérieures tard le soir, accroître la pression sur les corridors de transport et renforcer l’importance d’opérations de périmètre ininterrompues autour des actifs municipaux. Une canicule peut aussi révéler des faiblesses dans les armoires de communication, la planification électrique et la disponibilité du personnel. Le point de douleur dans ce cas est la coupure réseau : si une plateforme vidéo centrale, un lien backhaul ou un chemin cloud est indisponible, un modèle classique de télésurveillance peut perdre en visibilité précisément lorsque les conditions d’exploitation sont moins tolérantes.
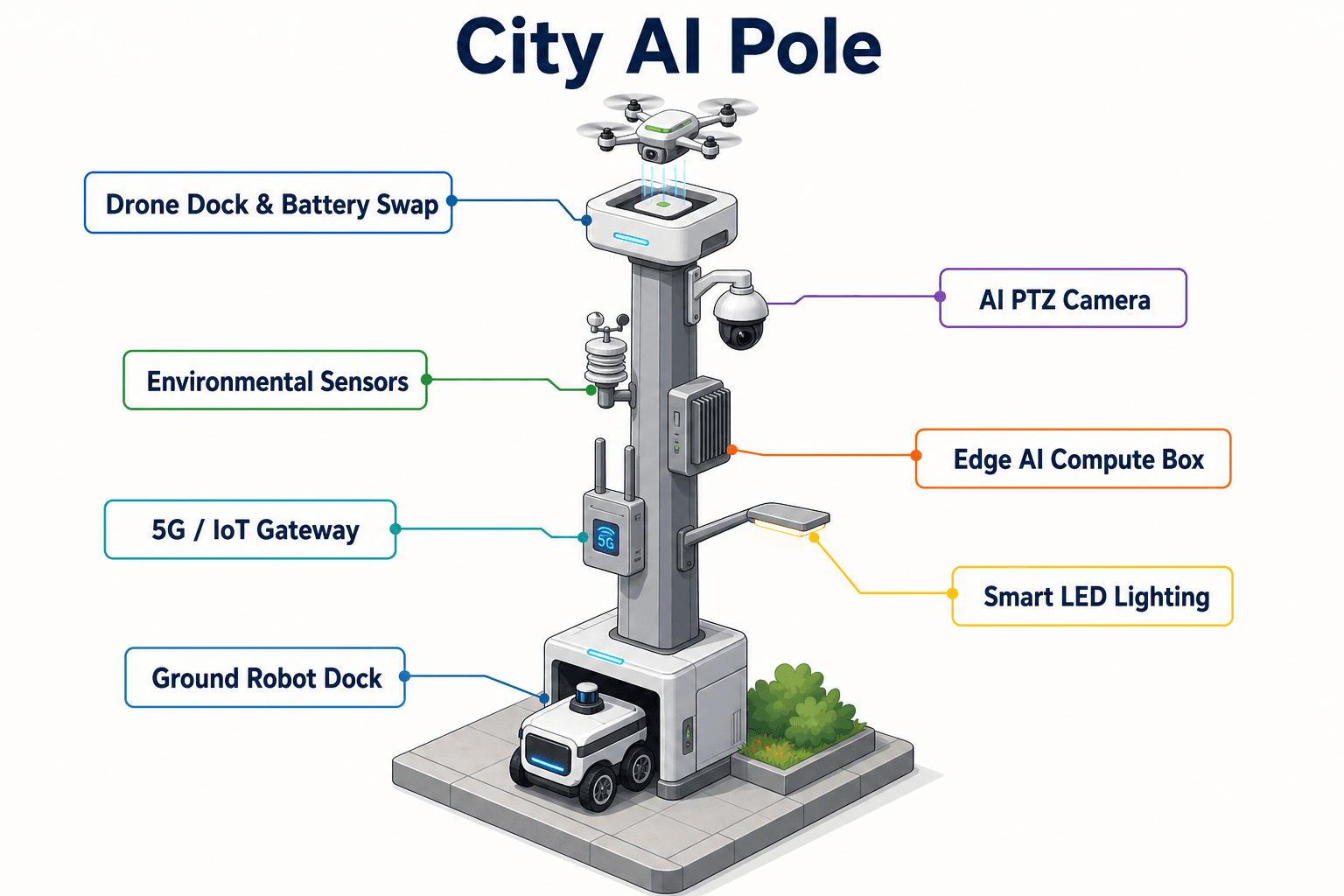
La réponse proposée est un déploiement, sur le périmètre du campus, de poteaux-nœuds edge Physical-AI SOLARTODO Sentinel. Chaque nœud est un poteau intelligent mince, cylindrique ou octogonal, avec corps en métal brossé, section photovoltaïque bleu nuit, anneaux lumineux LED cyan, station d’accueil drone intégrée en partie supérieure, station d’accueil pour robot de patrouille à la base, capteurs sur poteau et inférence edge-AI embarquée. L’étude de cas traite le poteau comme une infrastructure urbaine intégrée. Il n’est pas présenté ici comme un package drone autonome ou robot autonome ; le robot et le drone sont des modules au sein d’un système de nœud edge urbain configurable, sous réserve de confirmation technique finale.
Surveillance du périmètre pilotée par robot en conditions de coupure
Le principal module opérationnel dans ce cas est le robot de patrouille. Le robot est amarré à la base du poteau avec recharge automatique et sert à étendre l’observation du nœud, depuis un point fixe, vers de courtes boucles de patrouille répétables autour de la limite du campus. Dans un campus du CBD de Lisbonne, cela peut signifier vérifier des portails de service, entrées en retrait, barrières temporaires, accès de chargement, angles morts le long des clôtures et zones où une caméra PTZ fixe peut perdre sa ligne de vue en raison du mobilier urbain, de véhicules stationnés, de la pente ou de la foule.
Le scénario opérationnel est volontairement étroit : surveillance de frontière du périmètre d’un campus pendant une coupure réseau. Le robot ne remplace pas les politiques, les agents de sécurité ni les services d’urgence. Il apporte une couche mobile de détection et de présence que les équipes municipales peuvent missionner localement lorsque le système edge-AI du poteau signale une anomalie ou lorsqu’une logique de patrouille planifiée demande une vérification d’itinéraire. Le robot peut être quadrupède ou à roues, selon les surfaces du site, les transitions de bordure, la pente, les contraintes d’amarrage et les règles de l’espace public. La forme finale serait confirmée lors de la revue d’ingénierie.
Le poteau SOLARTODO Sentinel soutient ce workflow parce que la prise de décision ne dépend pas entièrement d’un aller-retour cloud. L’accélérateur edge-AI embarqué sur le poteau effectue l’inférence localement dans une armoire ventilée. La caméra PTZ, le capteur météo et environnemental, et le radar 4D ou LiDAR optionnel alimentent le nœud edge afin que le système puisse classifier les événements, les scorer et déclencher des actions locales même lorsque le backhaul est dégradé. Cela compte pour l’OPEX, car le mode de défaillance coûteux n’est pas seulement un incident ; c’est le schéma de réponse manuelle créé par l’incertitude. Si chaque coupure impose des effectifs de patrouille supplémentaires, des vérifications répétées par superviseur et des rondes manuelles du périmètre, le coût d’exploitation augmente rapidement.
Pour la gestion urbaine de Lisbonne, le modèle piloté par robot doit être évalué comme un mécanisme de contrôle de l’OPEX. L’objectif est de réduire les rondes manuelles inutiles du périmètre, les interventions à l’aveugle et de mieux prioriser le temps du personnel pendant les périodes de canicule. Le cadrage des KPI doit reposer sur des données de planification et des métriques d’évaluation : nombre de boucles de patrouille automatisées par semaine, nombre de vérifications doublonnées évitées, pourcentage d’événements résolus localement, nombre d’escalades pendant les périodes de coupure et heures de maintenance par nœud. Aucun résultat obtenu n’est revendiqué ici ; il s’agit de catégories d’évaluation pour un pilote proposé ou une spécification d’achat.
Configuration du nœud Sentinel axée sur les communications
Le module prioritaire pour ce déploiement proposé est la communication. En pratique, cela ne signifie pas présenter le poteau comme un produit télécom ni inventer une architecture réseau fixe. Cela signifie configurer le nœud Sentinel afin que la mission municipale continue de manière contrôlée lorsque le chemin réseau habituel est indisponible. Le principe de conception clé est la continuité locale : détecter localement, inférer localement, décider localement lorsque la politique l’autorise, envoyer le robot localement et enregistrer les événements pour synchronisation ultérieure au retour de la connectivité.
L’armoire edge-AI est centrale dans cette stratégie de communication. Comme l’inférence s’effectue sur le poteau, le nœud peut continuer à traiter les entrées caméra et capteurs sans attendre une analyse cloud. Pendant une coupure de backhaul, il peut prioriser les alertes locales, les instructions d’envoi du robot, les extraits d’événements et les journaux d’état. Une fois la connectivité rétablie, le système peut transférer les enregistrements conservés vers l’environnement d’exploitation choisi par la ville, sous réserve des règles de gouvernance des données et de conservation. Ce comportement proposé doit être validé lors de la confirmation technique et des tests d’acceptation.
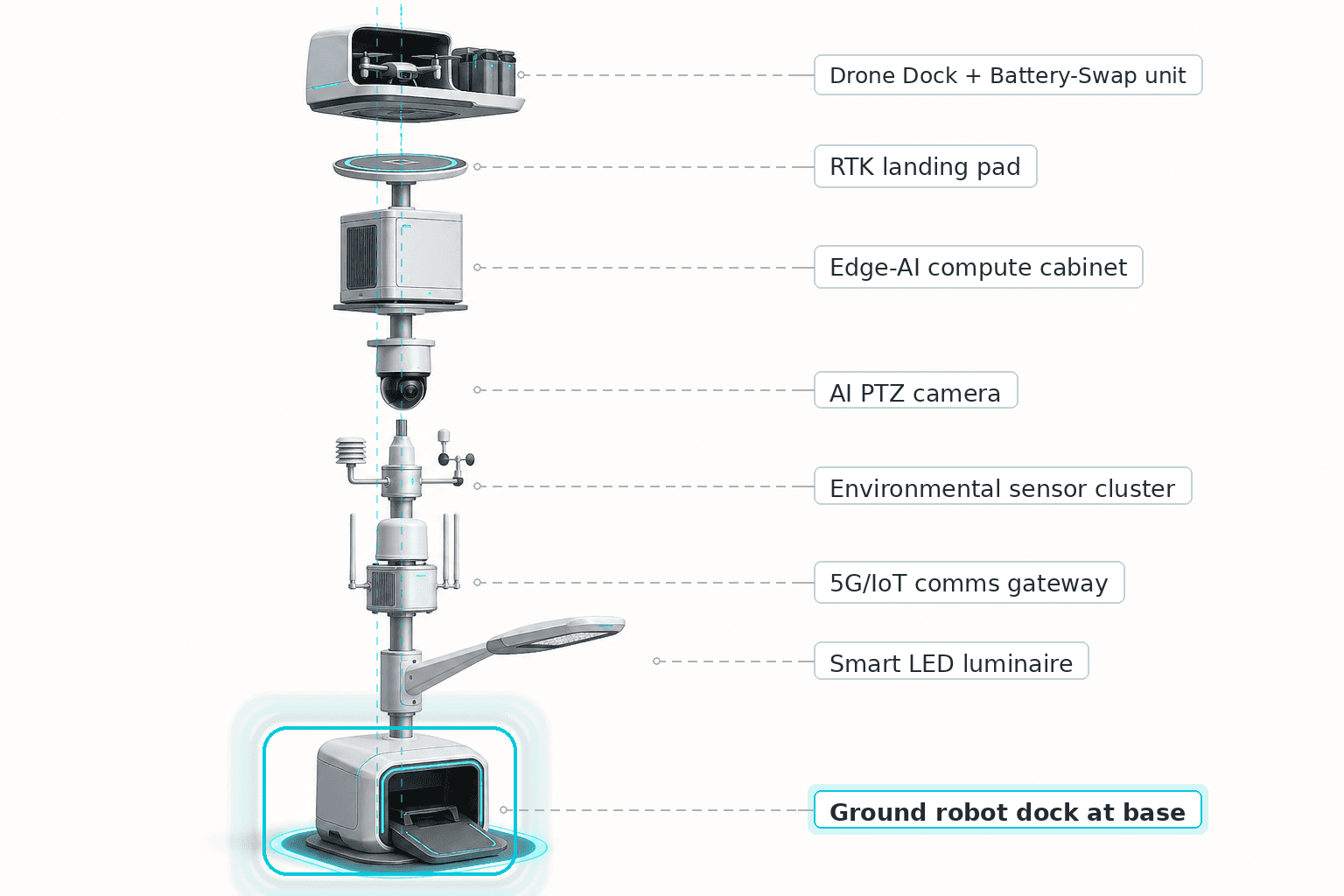
La forme visuelle compte aussi dans un déploiement en CBD. Le Sentinel est spécifié comme un poteau mince, cylindrique ou octogonal, avec corps en métal brossé, section photovoltaïque bleu nuit et anneaux lumineux LED cyan. Une station ou un nid de drone SOLARTODO blanc est placé en partie supérieure avec toit en coquille, plateforme d’atterrissage RTK de précision et magasin de hot-swap de batteries pour remplacement automatisé rapide des batteries, sans citer de durée de remplacement fixe. L’unité au sol s’amarre à la base. Le regroupement de ces modules dans un seul poteau urbain réduit le besoin d’armoires dispersées, d’équipements temporaires ou de multiples actifs terrain déconnectés.
La planification électrique reste propre au site. Sentinel peut être alimenté par le réseau électrique ou par une configuration hybride éolien-solaire. À Lisbonne, le choix final dépendrait de l’ombrage, des contraintes paysagères urbaines, du contexte patrimonial, de l’exposition au vent, de la disponibilité électrique, de l’accès maintenance et des règles de génie civil. La section photovoltaïque médiane fait partie de l’architecture du poteau, mais elle ne doit pas être considérée comme une garantie universelle d’alimentation. L’exploitation en période de canicule doit être vérifiée au regard de la ventilation de l’armoire, du cycle d’utilisation des batteries, de la disponibilité des capteurs, de la fiabilité de l’amarrage et de l’accès sécurisé à l’espace public.
Modèle opérationnel interservices
Un déploiement crédible dépend de règles d’exploitation partagées avant l’installation. La gestion urbaine doit définir l’objectif de surveillance du périmètre et le modèle d’évaluation de l’OPEX. La sécurité doit définir ce qui constitue une anomalie de priorité faible, moyenne ou élevée. L’IT doit définir les modes de coupure, le comportement acceptable du traitement local et les règles de synchronisation. Les facilities doivent confirmer les fondations des poteaux, la faisabilité du raccordement réseau ou de l’alimentation hybride, l’accès à l’armoire et les calendriers de nettoyage. Les équipes espace public doivent confirmer que les itinéraires du robot n’entrent pas en conflit avec les piétons, les parcours accessibles, les accès d’urgence, les flux cyclables ou les configurations temporaires d’événements.
Le workflow proposé peut être organisé en trois états d’exploitation. En mode normal, la caméra PTZ et les capteurs surveillent le périmètre du campus, le robot effectue des patrouilles planifiées ou déclenchées par événement, et les enregistrements passent par le chemin réseau standard de la ville. En mode réseau dégradé, l’accélérateur edge-AI embarqué poursuit l’inférence sur appareil, le poteau priorise la décision locale et le robot peut toujours être envoyé pour des vérifications définies. En mode réseau rétabli, les données d’événement et journaux conservés sont synchronisés conformément à la politique approuvée. Cette structure aide les services à décider ce qui doit rester disponible pendant les conditions de coupure et ce qui peut attendre.
L’unité drone est incluse dans le poteau intégré, mais le sujet principal ici reste le robot. La station d’accueil drone peut soutenir une inspection en vue plongeante lorsque cela est autorisé et conçu techniquement, au moyen de la station SOLARTODO blanche avec toit en coquille, plateforme d’atterrissage RTK et magasin automatisé de hot-swap de batteries. Pour un périmètre de campus dense dans le CBD de Lisbonne, l’usage du drone peut être plus contraint que celui du robot en raison de l’espace aérien, de la sécurité publique, de la météo et des règles du site. La conception pratique doit donc éviter de dépendre du vol comme seul mécanisme de continuité.
Le traitement des données doit être défini dans le cadre de la spécification de gestion urbaine. Le cas soutient l’inférence sur appareil et l’action à faible latence sans aller-retour cloud, mais les règles d’enregistrement, de masquage, de conservation, de contrôle d’accès et les responsabilités d’escalade doivent être fixées par l’acheteur et la revue locale de conformité. Le système doit être évalué comme une configuration opérationnelle de nœud edge, et non comme une autorité autonome. Les superviseurs humains restent responsables des décisions de politique, de l’escalade d’urgence et de toute action exigeant une intervention formelle.
Évaluation de l’OPEX et préparation du pilote
Le dossier OPEX doit être construit à partir d’hypothèses recalculables plutôt que d’économies revendiquées. Un acheteur lisboète peut modéliser la fréquence actuelle des patrouilles manuelles du périmètre, l’exposition aux heures supplémentaires pendant les canicules, les vérifications doublonnées pendant les coupures réseau, les taux d’interventions erronées, les visites de maintenance et les temps d’arrêt. Le déploiement Sentinel proposé devient alors une question de pilote contrôlé : un poteau intégré avec inférence locale, robot de patrouille amarré, workflows de communications résilientes et enregistrement défini des événements peut-il réduire le temps passé par le personnel à vérifier des événements de périmètre à faible niveau de confiance ?
Un pilote de périmètre de campus doit commencer par des études de site plutôt que par des revendications de quantité. Les équipes d’ingénierie confirmeraient la ligne de vue, la géométrie des itinéraires robot, l’emplacement d’amarrage, la fondation du poteau, l’alimentation réseau ou hybride éolien-solaire, la ventilation de l’armoire, les vues caméra, le besoin éventuel de radar 4D ou de LiDAR, le comportement de secours des communications et l’accès maintenance. L’acheteur doit aussi définir les conditions d’arrêt : seuils météo, restrictions liées aux événements publics, fenêtres de test de coupure réseau et procédures de reprise manuelle.
Le langage d’achat doit rester spécifique et prudent. L’acheteur n’achète pas un poteau caméra générique, un drone autonome ou un robot autonome. L’actif proposé est SOLARTODO Sentinel, un nœud edge urbain Physical-AI avec détection intégrée, calcul edge, station d’accueil drone, station d’accueil robot au sol, options d’alimentation et inférence locale. La configuration est personnalisée et soumise à confirmation technique. Aucun prix, garantie de couverture, taux de détection ni résultat opérationnel ne doit être déduit de cette étude de cas illustrative.
Pour la gestion urbaine de Lisbonne, le résultat utile d’un pilote serait un cadre décisionnel : quelles tâches de périmètre peuvent être automatisées, lesquelles exigent une revue humaine, quelles conditions de coupure le nœud peut tolérer et quels paramètres OPEX évoluent suffisamment pour justifier une extension. La leçon la plus importante est que la conception des communications et le modèle opérationnel du robot doivent être spécifiés ensemble. Pendant une coupure réseau en période de canicule, un robot n’est utile opérationnellement que si le nœud edge peut encore détecter, décider, agir et enregistrer dans une boucle locale contrôlée.
Configuration du système
| Paramètre | Configuration |
|---|---|
| Corps du poteau | Poteau mince cylindrique ou octogonal en métal brossé, avec section photovoltaïque bleu nuit et anneaux lumineux LED cyan |
| Calcul IA edge | Armoire ventilée sur poteau avec accélérateur edge-AI embarqué pour l’inférence sur appareil et les décisions locales à faible latence |
| Module robot | Robot de patrouille générique amarré à la base du poteau avec recharge automatique, configuré pour les vérifications d’itinéraires du périmètre du campus |
| Module drone | Station d’accueil SOLARTODO blanche avec toit en coquille, quadricoptère générique, plateforme d’atterrissage RTK et magasin automatisé de hot-swap de batteries |
| Pack de capteurs | Caméra PTZ, capteur météo et environnemental, avec radar 4D ou LiDAR optionnel sous réserve d’étude de site |
| Option d’alimentation | Alimentation réseau ou configuration hybride éolien-solaire, sous réserve de confirmation technique du site à Lisbonne |
| Continuité des communications | Inférence locale, priorisation des événements et workflow opérationnel de stockage-transmission pour les périodes de réseau dégradé |
Comment ça marche
- La caméra PTZ ou le radar/LiDAR optionnel signale une anomalie de périmètre à la limite du campus dans le CBD.
- L’accélérateur edge-AI embarqué classifie et score l’événement localement sans aller-retour cloud.
- Si la politique l’autorise, le poteau envoie le robot de patrouille amarré vérifier le portail, la ligne de clôture ou l’entrée de service.
- Pendant une coupure réseau, le nœud priorise les alertes locales et conserve les preuves d’événement pour synchronisation ultérieure.
- Un superviseur municipal examine l’enregistrement, confirme le statut d’escalade et met à jour le journal d’évaluation OPEX.
Hypothèses de planification (indicatives)
Données de planification illustratives que l’acheteur peut recalculer : indicateurs cibles, pas des résultats obtenus. Sous réserve de confirmation finale d’ingénierie.
| Indicateur | Hypothèse de planification | Valeur indicative |
|---|---|---|
| Main-d’œuvre d’inspection | La patrouille robotisée automatise certaines vérifications de périmètre qui exigeraient autrement des rondes manuelles à pied | ~10-20 boucles de patrouille/semaine ciblées pour automatisation |
| Réponse aux coupures | L’inférence edge locale réduit les interventions à l’aveugle lorsque la supervision centrale ou le backhaul est indisponible | ~25-40% des vérifications à faible priorité ciblées pour vérification locale |
| Revue par superviseur | Les extraits d’événements et journaux d’état du robot sont mis en file d’attente pour revue après le retour de la connectivité | ~1 lot de revue consolidé par événement de coupure |
| Effectifs en période de canicule | Les fenêtres de patrouille automatisées couvrent les vérifications de périmètre en fin de soirée pendant les périodes de fortes températures | ~2-4 fenêtres de patrouille en soirée/semaine ciblées |
| Planification de la maintenance | Le poteau intégré, la station d’accueil, la recharge du robot et l’armoire edge sont inspectés lors d’une seule visite de maintenance terrain | ~1 visite de maintenance planifiée/nœud/mois comme donnée de planification |
Équipements déployés
- Corps de poteau intelligent SOLARTODO Sentinel avec section photovoltaïque et anneaux lumineux LED
- Armoire ventilée d’inférence edge-AI sur poteau
- Pack caméra PTZ et capteur météo/environnemental
- Module de détection optionnel radar 4D ou LiDAR
- Station d’accueil drone SOLARTODO blanche avec toit en coquille et plateforme d’atterrissage RTK
- Quadricoptère générique avec intégration d’un magasin automatisé de hot-swap de batteries
- Robot de patrouille générique amarré à la base avec recharge automatique
- Package de raccordement électrique réseau ou hybride éolien-solaire
Questions fréquentes
S’agit-il d’un résultat de déploiement réel à Lisbonne ?
Non. Il s’agit d’une configuration de déploiement B2B proposée et illustrative pour la planification de la gestion urbaine à Lisbonne. Elle ne revendique aucun projet attribué, quantité installée, taux de détection atteint, zone de couverture, nom de client, certification ou résultat opérationnel. L’objectif est de montrer comment SOLARTODO Sentinel pourrait être spécifié pour une mission de surveillance de frontière du périmètre d’un campus dans le CBD, sous réserve de confirmation technique finale.
Pourquoi le robot est-il le module principal pour ce scénario à Lisbonne ?
Le robot est le module principal parce que la mission est la surveillance de frontière du périmètre d’un campus, où les caméras fixes peuvent manquer des portails en retrait, des entrées de service, des ombres de véhicules stationnés ou des barrières temporaires. Un robot de patrouille amarré peut effectuer de courtes boucles de vérification depuis la base du poteau, réduisant le besoin de contrôles manuels pendant les périodes de canicule et les conditions de réseau dégradé, tout en maintenant les superviseurs humains aux commandes.
Comment le système fonctionne-t-il pendant une coupure réseau ?
La configuration proposée s’appuie sur l’inférence sur poteau plutôt que sur un aller-retour cloud obligatoire. L’accélérateur edge-AI embarqué traite localement les entrées capteurs, score les événements, envoie le robot lorsque la politique l’autorise et conserve les enregistrements d’événements pour synchronisation ultérieure. Le comportement exact en cas de coupure, le routage des alertes, la conservation et les communications de secours doivent être confirmés par les équipes IT et ingénierie de l’acheteur.
Le SOLARTODO Sentinel remplace-t-il les agents de sécurité ou les équipes d’intervention d’urgence ?
Non. Le Sentinel est un poteau-nœud edge urbain intégré destiné à soutenir la détection, la vérification, l’automatisation des patrouilles et la tenue des enregistrements. Il ne remplace pas l’autorité humaine, les services d’urgence ni les décisions de politique municipale. Dans cette étude de cas, le robot aide à vérifier les événements de périmètre à faible niveau de confiance afin que le personnel puisse prioriser les réponses sur la base de meilleures preuves locales.
Le drone peut-il être utilisé comme principal outil d’inspection ?
Le drone fait partie du poteau intégré SOLARTODO Sentinel, avec une station d’accueil blanche, un toit en coquille, une plateforme d’atterrissage RTK et un magasin automatisé de hot-swap de batteries. Toutefois, ce scénario lisboète est piloté par robot parce que les conditions denses du CBD peuvent contraindre le vol. L’usage du drone doit être considéré comme optionnel et soumis aux règles du site, à la revue de sécurité, à la météo et à la confirmation technique.
Que doit mesurer la gestion urbaine de Lisbonne dans un pilote ?
L’acheteur doit mesurer des KPI de planification plutôt que supposer des économies dès le départ : patrouilles manuelles évitées, événements de période de coupure vérifiés localement, temps de revue par superviseur, visites de maintenance, achèvement des itinéraires robot et qualité des escalades. Ces données permettent à la ville de recalculer l’impact OPEX à partir de son propre modèle de main-d’œuvre, de son plan d’exploitation en période de canicule, de son architecture réseau et de ses exigences de service.
Pour aller plus loin
- Gamme de mâts City AI / éclairage public intelligent
- Plus de cas de déploiement de ville intelligente
- Parlez à notre équipe d’ingénierie
Vous planifiez un déploiement d’IA physique similaire pour rues, campus ou espaces publics ? Demander une consultation d’ingénierie