
Un poteau d’IA urbaine est un nœud périphérique d’IA physique entièrement hors réseau qui combine détection locale, calcul en périphérie, recharge solaire avec batterie de secours, opérations de drones et opérations de robots dans un format de poteau sans éclairage. Dans cette configuration pour Mascate, SOLARTODO Sentinel Sky Hub prend en charge la patrouille nocturne des vacances aux points de coupe transversale de cours d’eau dans la vieille ville en traitant les preuves localement et en partageant uniquement des métadonnées d’événements et d’état désidentifiées.
1. Contexte du pilote : vieille ville de Mascate, nuits de vacances et preuves aux coupes transversales de cours d’eau
Cette configuration de rapport pilote est rédigée pour une partie prenante éco-environnementale responsable des opérations de patrouille nocturne dans la vieille ville de Mascate, à Oman. L’objectif n’est pas l’éclairage routier, la décoration urbaine ni une vitrine générique de ville intelligente. La mission municipale est plus ciblée et plus opérationnelle : placer des nœuds périphériques d’IA physique à certains points de coupe transversale de cours d’eau où des incidents environnementaux, des mouvements après les horaires habituels, des attroupements, des dépôts sauvages, du bruit, de la fumée, de la poussière ou des accès non autorisés peuvent devoir être documentés pendant les périodes de vacances.
La vieille ville de Mascate présente un défi de surveillance pratique. Les équipes de patrouille peuvent devoir couvrir des fronts d’eau, des wadis, des franchissements de drainage, des espaces publics proches du patrimoine, des voies de service et des points de périmètre après la tombée de la nuit, lorsque la collecte manuelle de preuves est plus difficile à standardiser. Un déclencheur lié aux vacances modifie le mode d’exploitation : plus de visiteurs, une activité en soirée prolongée, des charges de service temporaires et un besoin accru de dossiers clairs pouvant être examinés sans collecte excessive de données personnelles.
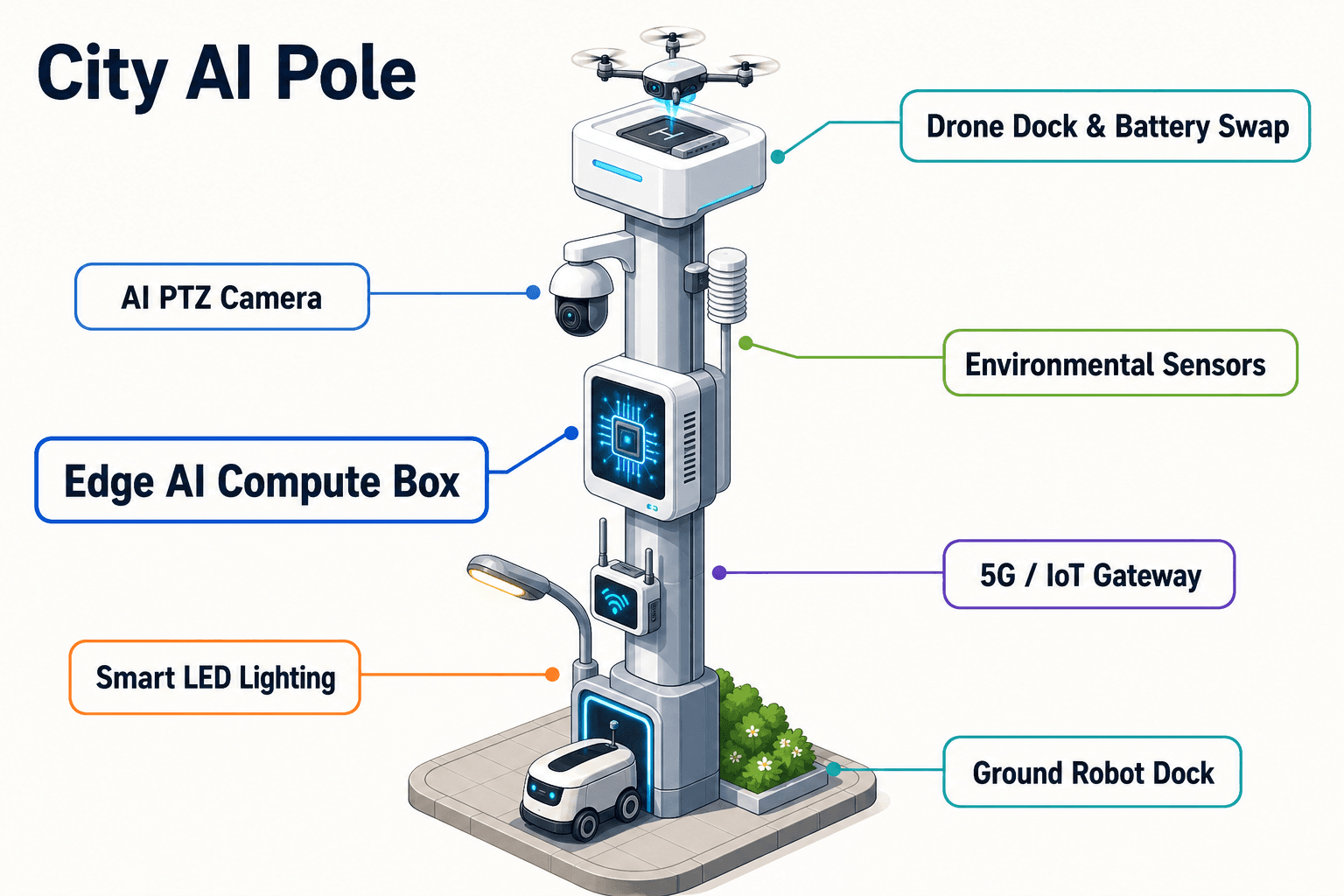
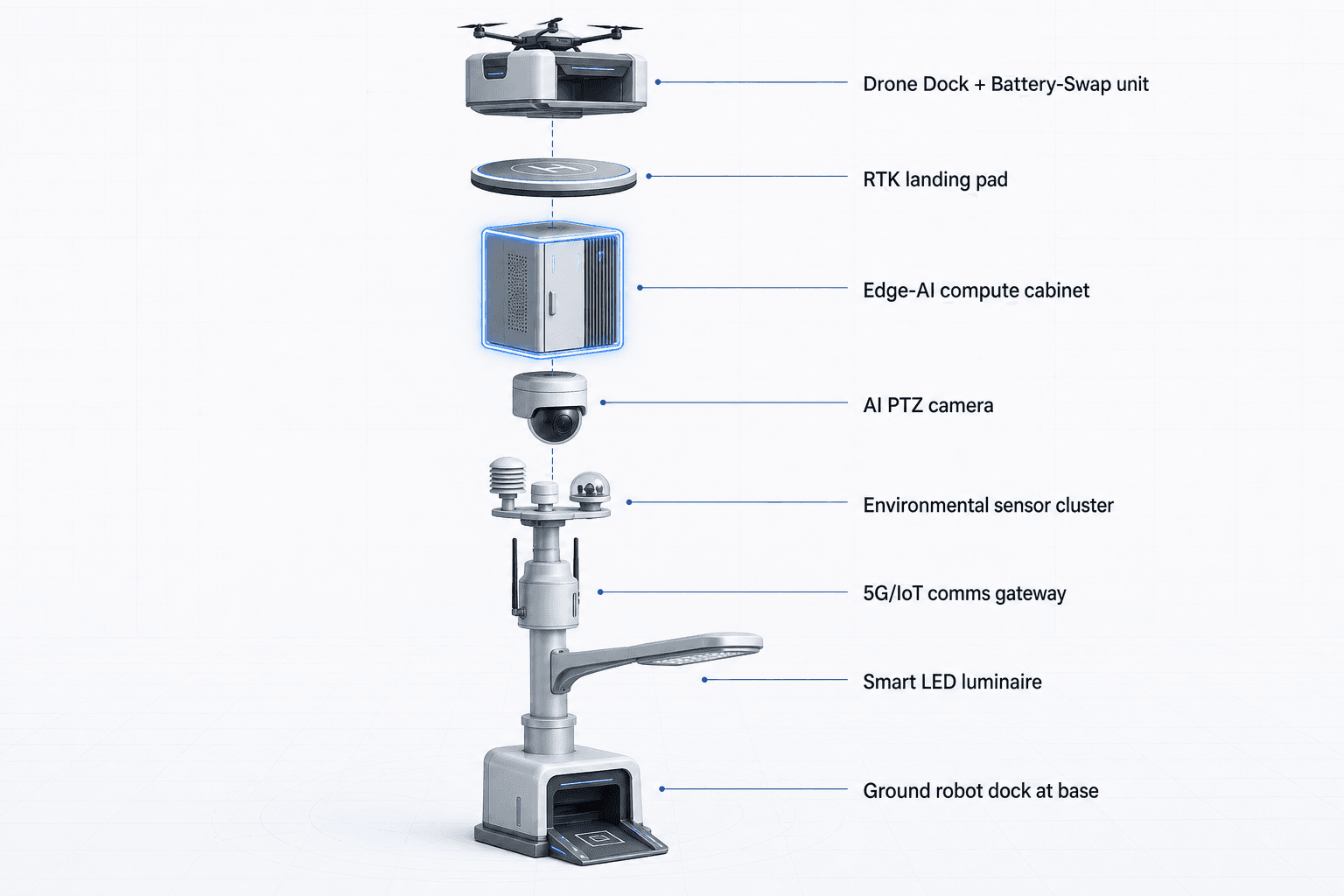
La configuration proposée de SOLARTODO Sentinel Sky Hub utilise la catégorie de poteau d’IA urbaine comme nœud périphérique urbain, et non comme équipement d’éclairage. Chaque Sky Hub est un poteau intelligent PURE sans système d’éclairage. Son rôle est d’héberger la détection, le calcul, le stockage d’énergie, les opérations de drones, les opérations de robots et la coordination du flux de preuves dans une micro-station hors réseau unique.
Le pilote est soumis à une confirmation finale d’ingénierie, notamment pour la sélection des sites, l’exposition au vent, le rendement solaire, la planification radio, les autorisations de vol de drones, la sécurité des itinéraires des robots terrestres et les procédures opérationnelles locales. L’intention est de définir un modèle de déploiement crédible et un cadre d’évaluation, et non de revendiquer des résultats obtenus.
2. Modèle de déploiement : des nœuds de coupe transversale de cours d’eau comme stations locales de preuves
Le mode de déploiement proposé est la coupe transversale de cours d’eau : les nœuds Sky Hub sont positionnés à certains points d’observation de coupe transversale où une équipe éco-environnementale souhaite obtenir des preuves répétables depuis les deux rives, les approches de franchissement ou les corridors de service adjacents. À Mascate, cela peut concerner des canaux de drainage de la vieille ville, des itinéraires adjacents aux wadis, des fronts d’eau ou des transitions de périmètre contrôlées où les conditions changent rapidement la nuit.
Un poteau Sky Hub fonctionne comme une station entièrement hors réseau. Le poteau porte environ 15 mètres carrés de film solaire mince CIGS flexible enveloppant à 360 degrés sur un corps cylindrique vertical d’environ 8 mètres de haut et environ 0,6 mètre de large. La couche solaire est une couche de recharge, et non une promesse d’énergie illimitée. Dans les régions à forte irradiance, la production réaliste par ciel dégagé pour ce format cylindrique vertical est d’environ 0,8 à 1,1 kW DC en crête, avec un pic généralement en milieu de matinée ou l’après-midi plutôt qu’à midi, et d’environ 6 à 9 kWh par jour. Les tâches de drones et de robots à forte puissance sont amorties par un stockage de classe 5 à 20 kWh et planifiées par cycle de service.
Cette conception énergétique est importante pour les opérations dans la vieille ville, car de nombreux points de surveillance utiles ne sont pas des sites d’alimentation pratiques. Tirer l’électricité jusqu’à chaque coupe transversale ajouterait des approbations, des travaux de site et des interfaces de maintenance. Le Sky Hub évite la dépendance au réseau, à la ville ou à l’alimentation du site tout en exigeant une planification disciplinée des cycles de service.
À chaque nœud, la vue d’image opérationnelle commune sur le poteau présente la boucle d’exploitation comme détection, évaluation et réponse autorisées, planification du calcul en périphérie, ainsi qu’opérations et maintenance sur le terrain. Cela soutient l’idée opérationnelle chinoise de détection, vérification, planification de la réponse et coordination en une seule boucle, tout en conservant l’autorisation humaine dans le processus décisionnel.
3. Flux de calcul en périphérie : traitement local avant toute sortie de métadonnées du poteau
Le module central de cette configuration pour Mascate est le calcul en périphérie. Un module périphérique de classe Jetson, dans un niveau de performance de classe Orin ou Thor, exécute l’inférence locale, la notation des événements et la planification des charges de travail à l’intérieur du poteau. Les flux vidéo bruts et les flux de capteurs restent sur le poteau et sont traités localement. Seules les métadonnées d’événements désidentifiées, les métadonnées d’état, les journaux et les dossiers de preuves approuvés peuvent quitter le nœud conformément à la politique opérationnelle.
Pour la partie prenante éco-environnementale, cela modifie le flux de collecte de preuves. Au lieu de collecter une vidéo brute continue de manière centralisée et de l’examiner plus tard, le poteau classe les événements opérationnellement pertinents en périphérie : comptage anonyme des véhicules, changement de densité de foule, intrusion ou conscience périmétrique, tendance anormale du bruit, variation de poussière, changement de direction du vent, variation d’éclairement et état de mission des opérations de drones ou de robots. Le système est conçu dans une logique PDPL/LGPD, ce qui signifie qu’il est conçu pour le traitement local et la minimisation des données. Il ne s’agit pas d’une revendication de certification ni de conformité réglementaire déjà vérifiée.
Un scénario de patrouille nocturne peut commencer par une caméra PTZ détectant une activité près d’un chemin d’accès à un point de coupe transversale de cours d’eau, tandis que les capteurs environnementaux indiquent des niveaux élevés de bruit et de particules. Le module périphérique note l’événement, planifie le maintien de la scène par la PTZ et présente une alerte désidentifiée dans la vue de commande. Un opérateur humain peut autoriser une sortie de drone pour une inspection aérienne ou dépêcher un robot terrestre pour une observation plus rapprochée le long d’un itinéraire autorisé.
L’objectif n’est pas de remplacer la responsabilité par l’automatisation. L’objectif est de rendre le premier dossier de preuves plus cohérent : heure, état du nœud, relevés environnementaux, instantané capteur, décision de mission, autorisation de l’opérateur, journal de tâche du drone ou du robot et note de clôture. Cela réduit les répétitions évitables de patrouille nocturne et soutient une meilleure qualité d’examen.
4. Opérations de patrouille nocturne : coordination drones, robots et C-UAS
Pendant les périodes de patrouille nocturne des vacances, Sky Hub est configuré comme un nœud périphérique prêt pour les robots et les drones. Les opérations de drones comprennent le lancement, la patrouille régionale, l’inspection, le retour et le redéploiement de tâches pour des sorties autonomes sans opérateur stationné au poteau. Un magasin de batteries multi-baies effectue un échange automatisé de batteries en service arrière après l’atterrissage, permettant à un drone de recevoir un pack chargé et de redécoller. Plusieurs baies prennent en charge plusieurs sorties consécutives dans le cadre du plan d’exploitation.
La gestion des opérations de drones couvre la planification des itinéraires, la gestion de l’état de charge et d’échange, la mise en file des tâches, l’état de santé de la flotte et les journaux de mission. Le module périphérique planifie les charges de travail afin que la détection environnementale, l’analyse caméra, les tâches de drones et les tâches de robots ne se disputent pas aveuglément l’énergie ou le calcul.
Les opérations de robots terrestres ajoutent une deuxième couche pour les preuves à courte portée. Un robot humanoïde ou de service peut effectuer une patrouille autonome, une réponse aux alarmes, une inspection, une coordination air-sol et un retour à la base du poteau pour une recharge sans fil. Dans un contexte de vieille ville, cela est utile lorsqu’une vue par drone est insuffisante et qu’une observation au niveau de l’itinéraire est nécessaire sans envoyer immédiatement une équipe dans une zone à faible visibilité.
La coordination counter-UAS est traitée avec prudence. Le poteau détecte et suit un drone non autorisé à l’aide de sa détection locale et de toute entrée approuvée de capteurs partenaires optionnels. Le radar n’est pas intégré au poteau ; il ne peut être envisagé que comme entrée optionnelle ou de capteur partenaire. Après autorisation humaine, le nœud peut commander à son propre drone ami d’effectuer une capture aérienne douce au filet ou une dissuasion par approche rapprochée. L’approche d’atténuation est non létale et autorisée par un humain, sans attaque autonome.
5. Cadre d’évaluation : planification orientée opex, pas des résultats revendiqués
Le cadrage opex du pilote de Mascate porte sur l’effort d’exploitation, la répétition des patrouilles, la charge d’examen des preuves et la discipline des interventions sur le terrain. Ce rapport ne revendique pas de performance obtenue, de taux de détection, de zone de couverture, d’approbation client, de certification ni d’échelle de déploiement. Il fournit des hypothèses de planification qu’un acheteur peut ajuster pendant l’ingénierie, les autorisations et la conception opérationnelle.
Pour l’équipe éco-environnementale, l’évaluation doit comparer la pratique actuelle de patrouille nocturne à un flux de travail assisté par nœud. Les indicateurs utiles incluent le nombre de passages de patrouille de routine pouvant être automatisés, le nombre d’alertes environnementales clôturées avec des preuves suffisantes au premier examen, la fréquence à laquelle une intervention humaine est évitée parce que le drone ou le robot a collecté un contexte adéquat, et la cohérence de production des enregistrements d’événements désidentifiés.
Comme le système est entièrement hors réseau, l’évaluation doit également inclure la discipline énergétique : recharge solaire quotidienne, réserve de stockage, cycle de service des sorties de drones, cycle de service des patrouilles de robots, et conditions météorologiques ou de poussière affectant la production solaire. L’enveloppe CIGS à 360 degrés améliore l’exposition globale, mais la projection face au soleil détermine la production réelle à tout moment. L’acheteur doit considérer le solaire comme une recharge complémentaire pour une micro-station avec batterie de secours, et non comme une autorisation de faire fonctionner tous les modules à forte puissance en continu.
Une évaluation crédible à Mascate se conclut par une décision opérationnelle : quels points de coupe transversale justifient un service permanent par nœud, quelles tâches de patrouille restent manuelles, quels types d’événements exigent une escalade humaine et quels champs de métadonnées suffisent à la collecte de preuves éco-environnementales sans déplacer la vidéo brute hors du poteau.
Configuration du système
| Paramètre | Configuration |
|---|---|
| Format du poteau | Poteau intelligent PURE SOLARTODO Sentinel Sky Hub, nœud périphérique de poteau d’IA urbaine sans éclairage |
| Système énergétique | Micro-station entièrement hors réseau avec batterie de secours et recharge solaire CIGS flexible à 360 degrés |
| Calcul IA en périphérie | Armoire d’inférence sur poteau de classe Jetson pour la notation locale des événements, la planification des charges de travail et les journaux de mission |
| Détection de sécurité | Caméra PTZ IA pour le comptage anonyme des véhicules, la densité de foule, l’intrusion et la conscience périmétrique |
| Surveillance environnementale | Vitesse du vent, direction du vent, température, humidité, pression atmosphérique, bruit, PM10, PM2.5 et éclairement |
| Opérations de drones et de robots | Lancement autonome de drone et échange à chaud de batterie, plus patrouille de robot terrestre et recharge sans fil à la base du poteau |
| Traitement des données | Vidéo brute et données de capteurs traitées sur le poteau ; seules les métadonnées d’événements et d’état désidentifiées peuvent quitter le nœud |
Comment ça marche
- La PTZ sur poteau et les capteurs environnementaux signalent une anomalie nocturne à un point de coupe transversale de cours d’eau.
- L’IA en périphérie classe l’événement localement, note la priorité et conserve les flux vidéo bruts et les flux de capteurs sur le poteau.
- Un opérateur humain examine l’alerte désidentifiée dans la vue d’image opérationnelle commune et autorise la réponse.
- Le poteau planifie une sortie de drone, une patrouille de robot terrestre ou les deux, selon la réserve de batterie et les autorisations d’itinéraire.
- Les journaux de mission, les relevés environnementaux et les métadonnées d’événements désidentifiées sont regroupés dans un dossier de preuves pour examen.
- L’opérateur clôture, escalade ou réaffecte l’événement pendant que le nœud met à jour l’état de maintenance et d’énergie.
Hypothèses de planification (indicatives)
Données de planification illustratives que l’acheteur peut recalculer : indicateurs cibles, pas des résultats obtenus. Sous réserve de confirmation finale d’ingénierie.
| Indicateur | Hypothèse de planification | Valeur indicative |
|---|---|---|
| Main-d’œuvre d’inspection | La patrouille par drone remplace les passages manuels de patrouille nocturne de routine à certains points de coupe transversale de cours d’eau | ~10 à 20 passages de patrouille par semaine automatisés |
| Examen des preuves | L’IA en périphérie filtre la détection continue en dossiers d’événements désidentifiés pour examen par l’opérateur | ~30 à 60 dossiers d’événements examinés par semaine |
| Discipline des interventions sur le terrain | Les missions de première observation par robot ou drone fournissent du contexte avant l’envoi d’une équipe terrain | ~5 à 15 missions de première observation par semaine |
| Cycle de service énergétique | Les tâches de drones et de robots à forte puissance sont planifiées en fonction de la réserve de batterie et de la recharge solaire quotidienne | ~6 à 9 kWh par jour comme donnée de planification solaire |
| Couverture des pics de vacances | Les files de tâches de patrouille nocturne sont augmentées pendant les périodes de vacances sans ajouter d’opérateurs sur site à chaque poteau | ~2 à 3 fenêtres prioritaires par nuit |
Équipements déployés
- Corps de poteau sans éclairage SOLARTODO Sentinel Sky Hub
- Enveloppe solaire CIGS flexible et armoire de stockage batterie
- Module de calcul IA en périphérie sur poteau
- Ensemble caméra PTZ IA
- Suite de capteurs environnementaux à neuf paramètres
- Baie de drone autonome avec magasin de batteries multi-baies à échange à chaud
- Interface de recharge sans fil pour robot terrestre
- Console d’image opérationnelle commune OTATODO edge OS
Questions fréquentes
SOLARTODO Sentinel Sky Hub est-il un lampadaire intelligent ?
Non. Sky Hub est un poteau intelligent PURE sans système d’éclairage. Dans cette configuration pour Mascate, il est traité comme un poteau d’IA urbaine et un nœud périphérique urbain d’IA physique pour la détection, le calcul en périphérie, les opérations de drones, les opérations de robots terrestres et la coordination du flux de preuves. Il ne doit pas être spécifié comme équipement d’éclairage ni acheté comme remplacement de l’éclairage public.
Comment fonctionne la conception énergétique entièrement hors réseau dans les conditions de Mascate ?
Le poteau combine un stockage batterie avec environ 15 mètres carrés de recharge solaire à film mince CIGS flexible enveloppant à 360 degrés. Pour cette forme cylindrique verticale, la production réaliste par ciel dégagé est planifiée à environ 0,8 à 1,1 kW DC en crête et environ 6 à 9 kWh par jour dans des conditions de forte irradiance. Les tâches de drones et de robots nécessitent tout de même une planification des cycles de service par rapport à la réserve de stockage.
Quelles données quittent le poteau lors d’un événement de patrouille nocturne éco-environnementale ?
Le modèle prévu de traitement des données est d’abord le traitement local. Les flux vidéo bruts et les flux de capteurs restent sur le poteau, où l’IA en périphérie effectue l’inférence, la notation des événements et le conditionnement des preuves. Seules les métadonnées d’événements désidentifiées, les métadonnées d’état, les journaux de mission et les synthèses de preuves approuvées peuvent quitter le nœud, sous réserve de la politique opérationnelle de l’acheteur et de l’examen juridique final.
Le système peut-il prendre en charge les pics de vacances sans opérateur stationné à chaque nœud ?
Oui, la configuration proposée est conçue pour une exploitation de nœud sans surveillance avec autorisation humaine à distance. Pendant les périodes de vacances, les files de tâches peuvent prioriser les patrouilles de coupe transversale de cours d’eau, les contrôles d’anomalies environnementales, les missions de première observation par drone et le suivi par robot terrestre. Les opérateurs humains restent responsables des décisions d’autorisation, d’escalade et de clôture via la vue d’image opérationnelle commune.
Quel est le rôle du calcul en périphérie dans la collecte de preuves ?
Le calcul en périphérie réduit le besoin de déplacer des données brutes continues vers un système central pour un premier examen. Le module sur poteau classe les événements locaux, planifie les charges de travail de la caméra, du drone et du robot, et produit des dossiers de preuves désidentifiés. Cela soutient des enregistrements plus cohérents pour les équipes éco-environnementales tout en conservant les flux bruts sensibles au niveau du nœud.
Comment la coordination counter-UAS est-elle gérée dans cette configuration ?
Le poteau peut détecter et suivre un drone non autorisé grâce à sa propre détection et à des entrées approuvées de capteurs partenaires optionnels. Le radar n’est pas intégré au poteau. Toute atténuation est autorisée par un humain et non létale, par exemple en commandant au drone ami d’effectuer une capture aérienne douce au filet ou une dissuasion par approche rapprochée selon des règles d’exploitation définies.
Que doit évaluer l’acheteur avant de passer d’une configuration pilote à un service permanent ?
L’acheteur doit confirmer l’adéquation des sites de coupe transversale, les autorisations de vol, la sécurité des itinéraires de robots, la planification des communications, l’exposition solaire, la réserve de stockage, l’étalonnage des capteurs environnementaux, la politique de conservation des preuves et le flux d’autorisation humaine. La question d’évaluation la plus importante est de savoir si le nœud améliore la cohérence des patrouilles et la qualité des preuves sans créer de déplacement inutile de données brutes.
Pour aller plus loin
- Gamme de mâts City AI / éclairage public intelligent
- Plus de cas de déploiement de ville intelligente
- Parlez à notre équipe d’ingénierie
Vous planifiez un déploiement d’IA physique similaire pour rues, campus ou espaces publics ? Demander une consultation d’ingénierie