
Un poteau IA urbain / nœud edge d’IA physique Sentinel est un poteau intelligent SOLARTODO intégré et fin qui combine détection locale, inférence IA sur poteau, station d’accueil pour drone, robot de patrouille amarré et options d’alimentation dans un seul actif de rue. Dans ce déploiement proposé de lutte contre les inondations dans le vieux centre de São Paulo, les nœuds surveillent les sections transversales fluviales, déclenchent l’inspection robotisée et partagent les preuves avec une autorité de transport afin de raccourcir les décisions liées au temps de réponse.
Note opérationnelle de lutte contre les inondations pendant les vacances
Ce déploiement illustratif à São Paulo est présenté comme un plan opérationnel d’autorité de transport pour le cœur du vieux centre pendant les pics de déplacements de vacances et d’activité commerciale. L’objectif n’est pas une vitrine générique de ville intelligente. Il s’agit d’un flux de travail de lutte contre les inondations pour les rues, les accès de bus, les rampes de pont, les abords de stations et les corridors adjacents aux passages inférieurs qui peuvent perdre en fiabilité opérationnelle lorsque de fortes pluies coïncident avec une circulation piétonne et automobile accrue.
Le centre historique de São Paulo et les quartiers anciens adjacents s’inscrivent dans une trame viaire dense façonnée par des viaducs, des cours d’eau canalisés, des ruisseaux busés et des avaloirs difficiles à dégager. Lorsque l’eau de pluie s’accumule près d’un franchissement, la première question opérationnelle pour une autorité de transport est pratique : maintenir la circulation, retenir le service, détourner ou fermer un accès vulnérable avant que passagers et équipes ne soient exposés à une perturbation évitable.
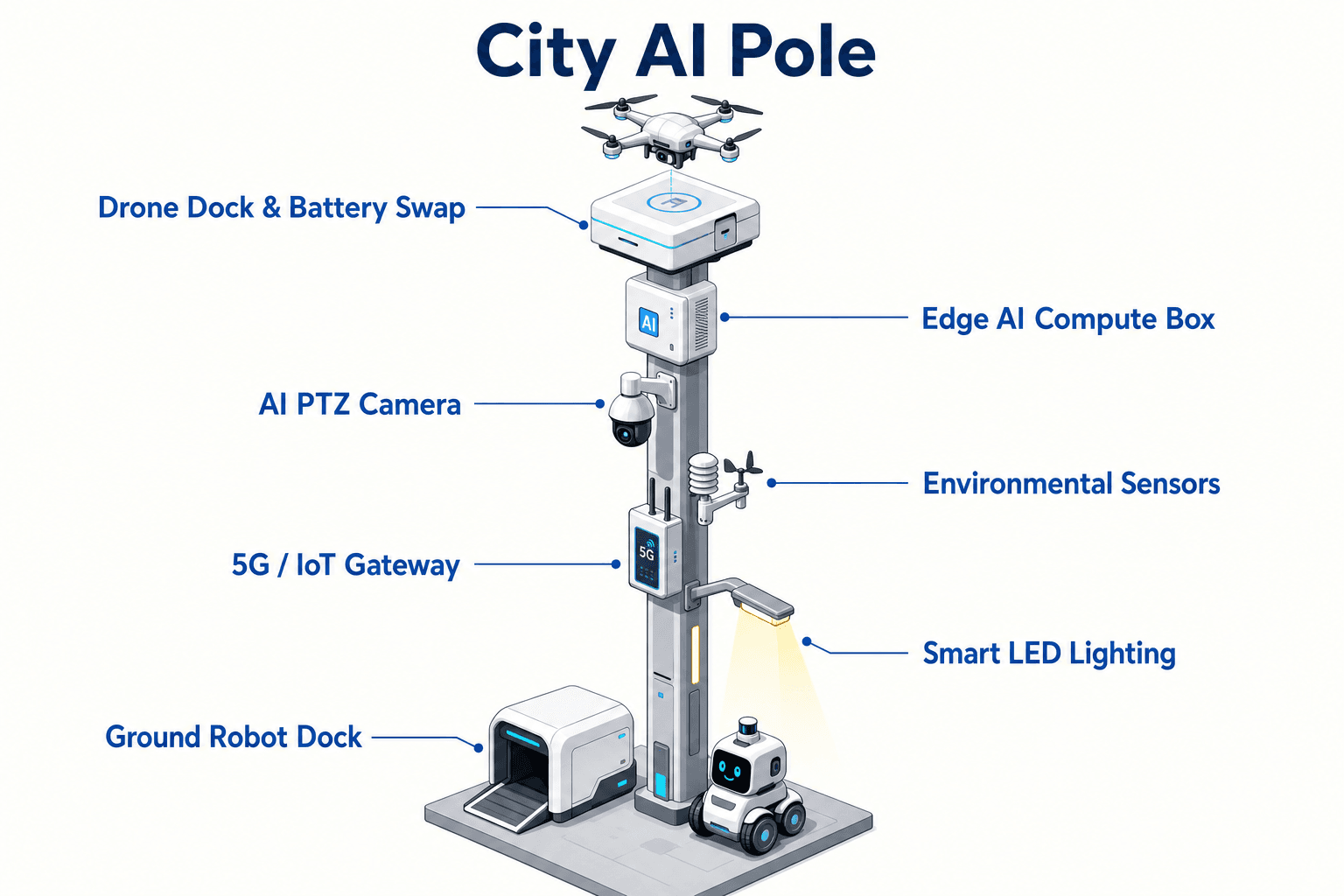
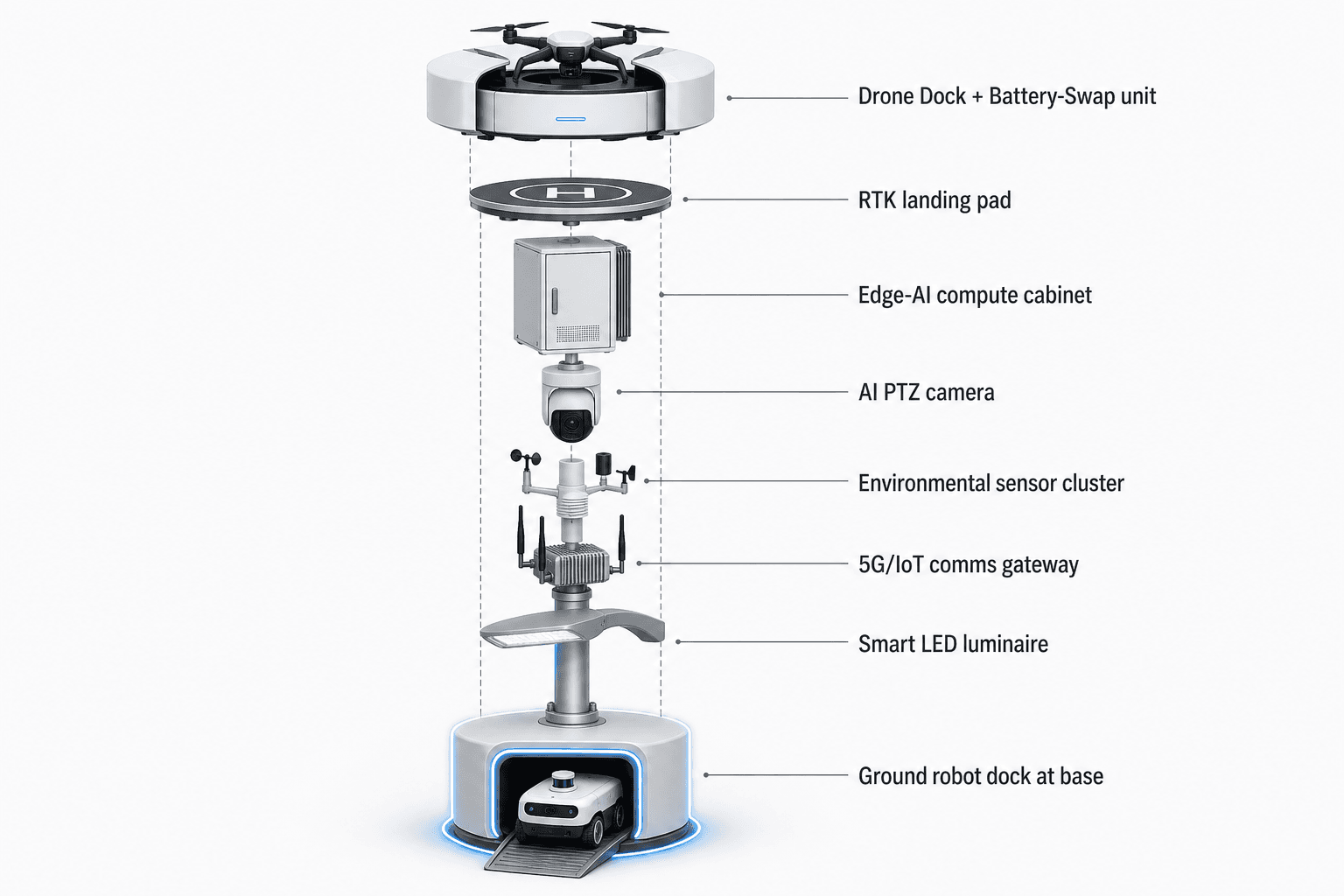
La configuration SOLARTODO Sentinel proposée est un poteau nœud edge urbain personnalisé, sous réserve de confirmation technique finale, positionné comme point de preuve partagé plutôt que comme gadget départemental. Chaque poteau fin cylindrique ou octogonal utilise un corps en métal brossé, une section photovoltaïque centrale bleu nuit et des anneaux LED d’accent cyan. Le poteau intègre le capteur météo/environnement, la caméra PTZ, l’accélérateur d’IA edge embarqué, la station d’accueil pour drone et le robot de patrouille terrestre dans un seul actif de rue. Pour le déclencheur de vacances, l’hypothèse opérationnelle est que l’autorité de transport a besoin d’une confiance plus rapide lorsque plusieurs services observent la même tempête sur des écrans séparés. Le capteur météorologique devient le premier déclencheur local, le robot devient le vérificateur de terrain, et le KPI de temps de réponse devient la mesure commune entre les équipes de transport, drainage, défense civile et opérations événementielles.
Modèle de déploiement par section transversale fluviale
Le mode de déploiement est la section transversale fluviale, ce qui signifie que chaque nœud proposé est planifié autour d’une tranche opérationnelle perpendiculaire du risque : berge, canal ou rivière, interface pont ou ponceau, voie d’approche, zone d’arrêt de bus, cheminement piéton, avaloir et itinéraire de retour pour une patrouille robotisée. À São Paulo, ce modèle est pertinent autour des corridors influencés par le Tietê, le Pinheiros, le Tamanduateí et des cours d’eau plus petits canalisés ou couverts qui affectent le réseau de mobilité du vieux centre. Le plan ne suppose pas un nombre fixe de poteaux ni une zone de couverture définie. L’espacement final, les points de montage, la conception électrique et les autorisations seraient confirmés par un examen d’ingénierie civile, électrique, de drainage et de transport.
Un poteau Sentinel sur une telle section transversale est configuré pour lire les conditions locales météo/environnement, exécuter l’inférence sur l’appareil et lancer une vérification de terrain sans attendre un aller-retour cloud. La caméra PTZ fournit au centre d’opérations une vue orientée de l’accumulation d’eau, des points de drainage obstrués, du comportement du trafic et de l’exposition des piétons. Un radar 4D ou un LiDAR optionnel peut être évalué lorsque la visibilité, la géométrie ou les mouvements de circulation rendent l’évaluation par caméra seule insuffisante, sous réserve d’étude de site. La station/nid de drone SOLARTODO blanche montée en tête avec toit à clapet prend en charge un quadricoptère générique pour de courts contrôles aériens du franchissement et des approches voisines. Sa plateforme d’atterrissage de précision RTK et son magasin automatisé d’échange à chaud de batteries sont utilisés pour réduire les temps d’arrêt sans revendiquer une durée d’échange fixe.
Le robot de patrouille monté à la base est central dans ce plan pour le vieux centre. Dans les rues étroites, les passages inférieurs ombragés et les zones en bordure où la profondeur de l’eau de pluie ou les débris peuvent être difficiles à évaluer depuis un seul angle de caméra, le robot amarré fournit une vérification plus proche. Un format quadrupède ou à roues serait sélectionné après inspection de l’itinéraire, examen des surfaces et évaluation de sécurité.
Du capteur météorologique à l’assignation du robot
Le module central est le capteur météorologique, mais la valeur opérationnelle vient de la manière dont il déclenche la tâche du robot. Dans le flux de travail proposé, le capteur météo/environnement n’est pas traité comme un simple flux de données passif. C’est un déclencheur local lié aux seuils de lutte contre les inondations définis par l’autorité de transport et les services partenaires. Lorsque les conditions évoluent vers une bande d’alerte, l’accélérateur d’IA edge embarqué du poteau corrèle les données du capteur local avec le contexte de la caméra et des règles opérationnelles prédéfinies. Le triage de routine se fait au niveau du poteau, avec une inférence sur appareil à faible latence et sans aller-retour cloud pour la première étape de classification.
Une fois l’événement local noté, le robot de patrouille peut être déployé depuis la base du poteau pour un court itinéraire d’inspection, sous réserve des règles de sécurité et de l’approbation de l’itinéraire. Le robot peut vérifier l’obstruction d’un avaloir, observer de l’eau stagnante au bord d’une voie de bus, inspecter le dessous d’une approche de pont depuis un chemin autorisé ou confirmer si un itinéraire piéton reste praticable. Le robot retourne à la station d’accueil de base pour la recharge automatique, en maintenant le poteau comme point opérationnel intégré plutôt que de créer un programme robotique séparé. Le drone reste un module d’appui pour le contexte aérien lorsque la visibilité directe, l’accès ou les conditions de sécurité justifient un vol.
Pour une autorité de transport, la distinction est importante. Une alerte météorologique distante seule peut être trop abstraite pour déclencher une décision de service. Un appel de terrain seul peut arriver tard. Une image de caméra seule peut être contestée par un autre service consultant un système différent. Le poteau Sentinel est proposé comme une boucle de preuve locale : déclencheur météo, classification edge, vérification robotisée, revue PTZ, vue aérienne optionnelle et enregistrement d’événement partagé. Cette séquence est conçue pour réduire le délai entre le signal de risque local et la décision opérationnelle, tout en laissant l’action finale au personnel municipal autorisé.
Rupture des silos interservices
Le principal point de douleur est le fonctionnement en silos entre services. Les décisions de lutte contre les inondations dans une grande ville exigent souvent que les opérations de transport, la maintenance du drainage, le contrôle du trafic, la défense civile, la sécurité publique, les prestataires d’assainissement et les gestionnaires d’événements s’accordent rapidement sur ce qui se passe. Dans une période de vacances dans le vieux centre, les enjeux augmentent car un retard évitable peut affecter les intervalles de bus, l’accès aux stations, les zones de taxi et de VTC, les fenêtres de livraison, les itinéraires d’urgence et les mouvements de foule près des rues commerçantes. Le déploiement Sentinel proposé n’est pas présenté comme un remplacement de ces services. C’est un nœud de terrain qui crée un paquet de preuves horodaté à partir d’une section transversale fluviale spécifique.
L’autorité de transport peut utiliser ce paquet pour coordonner une décision sans demander à chaque équipe de repartir de son propre capteur, de sa caméra, de son appel de terrain ou de son fil de discussion. Le paquet peut inclure le déclencheur du capteur météorologique, la classification d’événement par IA edge, des instantanés ou clips PTZ selon la politique locale, des notes d’inspection du robot, un contexte drone optionnel, les décisions de l’opérateur et l’état de suivi. La gouvernance des données, la conservation, les contrôles d’accès et l’intégration avec les systèmes de l’autorité seraient spécifiés pendant la conception technique et réglementaire.
C’est important parce que le KPI de l’autorité de transport est le temps de réponse, pas le volume de capteurs. Si une équipe de drainage voit les précipitations, le personnel de circulation voit la congestion et les superviseurs de terrain voient l’eau à des moments différents, la question partagée est retardée. Le poteau proposé change le modèle de coordination en ancrant la discussion sur une section transversale et un enregistrement d’incident uniques. Le capteur météorologique démarre l’événement, mais le robot le rend opérationnellement concret : il peut confirmer si le problème est une chaussée humide, un chemin bloqué, un danger de montée des eaux ou une obstruction de drainage nécessitant un intervenant différent.
Plan d’évaluation du temps de réponse
Le plan d’évaluation traite le temps de réponse comme une métrique cible, et non comme un résultat atteint. Avant le déploiement, l’autorité de transport définirait le processus de référence pour les décisions de lutte contre les inondations pendant les vacances aux sections transversales fluviales sélectionnées : comment une alerte est actuellement reçue, qui la valide, qui autorise une action de transport et comment l’action est enregistrée. La configuration Sentinel serait ensuite évaluée par rapport à cette référence à l’aide des horodatages du capteur météorologique, de la classification edge, du déploiement du robot, de l’accusé de réception de l’opérateur, de l’action de terrain et de la note de clôture. L’objectif est de mesurer si le poteau intégré raccourcit le chemin décisionnel et améliore la confiance, sous réserve de confirmation technique finale.
Aucun taux de détection, amélioration du temps de réponse, volume de déploiement ou périmètre de couverture spécifique n’est revendiqué. Un pilote crédible commencerait par des hypothèses de planification, des règles d’exploitation contrôlées et une période de veille de vacances clairement définie. L’autorité de transport prédéfinirait les classes d’itinéraires, les bandes de gravité d’alerte, les conditions d’interdiction pour le robot, les règles d’autorisation du drone et les contacts d’escalade. Chaque événement serait examiné pour déterminer si le déclencheur météo était significatif, si la vérification robotisée a ajouté un contexte utile, si le paquet partagé a réduit les appels en double et si la décision finale a été enregistrée proprement.
Sur le plan opérationnel, le succès est défini comme un meilleur tempo et une responsabilité plus claire. L’autorité de transport devrait pouvoir voir quand la condition locale a commencé, quand le poteau l’a classifiée, quand le robot l’a vérifiée, quand l’équipe responsable a accepté l’incident et quand la décision concernant le corridor a été prise. Cet enregistrement aide à affiner les futurs seuils, itinéraires de patrouille, plans de personnel et procédures interservices pour la prochaine période de vacances, sans prétendre que l’équipement à lui seul résout le défi de lutte contre les inondations de São Paulo.
Configuration du système
| Paramètre | Configuration |
|---|---|
| Forme du poteau | Poteau Sentinel fin cylindrique ou octogonal en métal brossé, avec section photovoltaïque centrale bleu nuit et anneaux LED d’accent cyan, montage final soumis à confirmation d’ingénierie du site. |
| Focus du capteur météorologique | Ensemble de capteurs météo/environnement sur poteau utilisé comme déclencheur local principal pour les seuils de lutte contre les inondations à une section transversale fluviale de São Paulo. |
| Calcul IA edge | Armoire ventilée sur poteau avec accélérateur d’IA edge embarqué pour l’inférence sur appareil, le triage à faible latence et l’absence d’aller-retour cloud pour la classification de routine. |
| Robot de patrouille terrestre | Robot de patrouille générique quadrupède ou à roues amarré à la base du poteau avec recharge automatique, configuré pour des itinéraires d’inspection approuvés en bordure et au niveau des franchissements. |
| Unité drone | Station/nid de drone SOLARTODO blanche avec toit à clapet, quadricoptère générique, plateforme d’atterrissage de précision RTK et magasin automatisé d’échange à chaud de batteries. |
| Détection visuelle et optionnelle | Caméra PTZ pour inspection dirigée, avec radar 4D ou LiDAR optionnel évalué lorsque la géométrie du site et la visibilité nécessitent une détection supplémentaire. |
| Configuration d’alimentation | Conception d’alimentation par réseau ou hybride éolien-solaire, sélectionnée après examen de l’accès aux services publics, de l’exposition solaire, de la faisabilité éolienne et de l’accès de maintenance. |
Comment ça marche
- Le capteur météo/environnement franchit un seuil de lutte contre les inondations défini localement à la section transversale fluviale.
- L’IA edge sur poteau corrèle le déclencheur avec le contexte de la caméra PTZ et note l’événement.
- Le robot de patrouille quitte la station d’accueil de base sur un itinéraire approuvé pour vérifier les conditions de bordure, d’avaloir et d’approche.
- Le drone décolle uniquement lorsqu’un contexte aérien autorisé est nécessaire pour le franchissement ou les approches voisines.
- Les opérations de transport reçoivent un paquet d’événement partagé pour la décision, le routage et l’escalade.
- Le système enregistre les horodatages des capteurs, les observations du robot, l’action de l’opérateur et l’état de clôture pour la revue du temps de réponse.
Hypothèses de planification (indicatives)
Données de planification illustratives que l’acheteur peut recalculer : indicateurs cibles, pas des résultats obtenus. Sous réserve de confirmation finale d’ingénierie.
| Indicateur | Hypothèse de planification | Valeur indicative |
|---|---|---|
| Substitution d’inspection par robot | Le robot de patrouille réalise certains contrôles de premier regard qui nécessiteraient autrement une observation manuelle pendant une veille d’inondation de vacances. | ~3 à 5 rondes d’inspection par veille automatisées comme donnée de planification. |
| Notation du temps de réponse | L’autorité de transport mesure le temps écoulé entre l’alerte du capteur météorologique et la décision de l’opérateur à l’aide d’horodatages d’événement partagés. | Fenêtre de planification de ~10 à 15 minutes pour l’évaluation, ajustée selon la classe d’itinéraire. |
| Transfert interservices | Un paquet d’événement est partagé entre les équipes de transport, drainage, défense civile et supervision de terrain au lieu de mises à jour informelles séparées. | ~1 enregistrement d’incident commun par alerte validée. |
| Revue de veille de vacances | Les superviseurs des opérations examinent la qualité des seuils, l’utilité du robot et l’acheminement des décisions pendant et après chaque veille de vacances. | ~2 cycles de revue par période de veille. |
| Filtrage des escalades manuelles | La classification edge et la vérification robotisée aident à distinguer les conditions à surveiller uniquement des conditions nécessitant une escalade terrain. | ~4 catégories d’alerte pour la planification : observer, vérifier, dérouter, fermer. |
Équipements déployés
- Corps de poteau intelligent fin SOLARTODO Sentinel avec section photovoltaïque centrale et anneaux LED d’accent
- Module de capteurs météo/environnement pour le seuillage local de lutte contre les inondations
- Armoire IA edge ventilée sur poteau avec accélérateur d’IA edge embarqué
- Caméra PTZ pour l’inspection dirigée des corridors et des franchissements
- Station/nid de drone SOLARTODO blanche avec toit à clapet, plateforme d’atterrissage RTK et magasin d’échange à chaud de batteries
- Quadricoptère générique configuré pour des contrôles de contexte aérien autorisés
- Robot de patrouille générique amarré avec recharge automatique à la base du poteau
- Module radar 4D ou LiDAR optionnel, sous réserve de confirmation du site
Questions fréquentes
Ce projet proposé à São Paulo est-il un achat de drone ou de robot ?
Non. La configuration proposée est un déploiement de poteau urbain intégré centré sur SOLARTODO Sentinel comme nœud edge d’IA physique. Le drone et le robot de patrouille sont des modules dans le flux de travail opérationnel du poteau. Ils ne sont pas présentés comme des produits autonomes ni comme des programmes séparés, et leur configuration dépend de la confirmation technique finale.
Pourquoi l’autorité de transport est-elle la principale partie prenante dans un scénario de lutte contre les inondations ?
L’autorité de transport est la partie prenante la plus directement responsable du maintien de l’utilisabilité des corridors, accès de bus, rampes de pont, accès aux stations et itinéraires de déviation pendant les épisodes de pluie. Les équipes de drainage peuvent être responsables de l’évacuation de l’eau, mais les opérations de transport doivent décider de détourner, retenir, restreindre ou rouvrir les actifs de mobilité lorsque le risque d’inondation affecte le service.
Comment le capteur météorologique améliore-t-il le KPI de temps de réponse ?
Le capteur météo/environnement fournit le premier déclencheur local à la section transversale fluviale, ce qui permet de classifier l’événement au niveau du poteau avant que les équipes n’attendent un rapport distant ou un appel manuel de terrain. Il lance une séquence mesurée qui inclut le triage edge, la vérification robotisée, l’accusé de réception de l’opérateur et une décision de transport enregistrée.
Qu’ajoute le robot de patrouille qu’une caméra fixe ne peut pas fournir ?
Une caméra PTZ fixe peut inspecter les zones visibles, mais un franchissement du vieux centre peut inclure des zones d’ombre en bordure, des approches de pont, des bords de passage inférieur, des avaloirs obstrués et des cheminements piétons hors du meilleur angle de caméra. Le robot amarré peut effectuer un itinéraire de patrouille rapproché approuvé et revenir à la recharge automatique, ajoutant un contexte de terrain à l’enregistrement d’incident partagé.
Le poteau nécessite-t-il un traitement cloud pour prendre la première décision ?
La classification de première étape de routine est conçue pour une inférence sur appareil à l’aide de l’accélérateur d’IA edge embarqué sur poteau, de sorte que le système ne dépend pas d’un aller-retour cloud pour le triage initial. Les systèmes externes peuvent toujours recevoir des enregistrements, des vidéos et des décisions d’opérateur conformément aux politiques d’intégration, de gouvernance et de conservation de l’autorité.
Que faut-il confirmer avant une installation réelle à São Paulo ?
Le déploiement final nécessiterait un examen d’ingénierie de l’emplacement du poteau, de la structure, de l’accès aux services publics, de l’alimentation réseau ou hybride éolien-solaire, de la sécurité des itinéraires du robot, des règles d’autorisation du drone, de la gouvernance des données, de l’accès de maintenance et de l’intégration aux systèmes d’opérations de transport. Le plan proposé est un modèle de déploiement B2B configurable, et non une revendication de performance terrain achevée.
Pour aller plus loin
- Gamme de mâts City AI / éclairage public intelligent
- Plus de cas de déploiement de ville intelligente
- Parlez à notre équipe d’ingénierie
Vous planifiez un déploiement d’IA physique similaire pour rues, campus ou espaces publics ? Demander une consultation d’ingénierie